Навигация
Определение угловых скоростей и ускорений звеньев
25719
знаков
5
таблиц
3
изображения
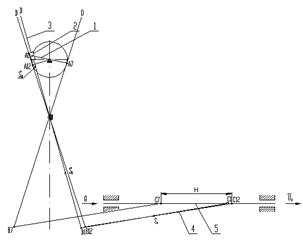
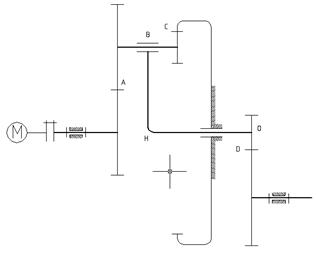
1.5 Определение угловых скоростей и ускорений звеньев.
ω1 [C1] = ( π · nкр ) / 30º = ( 3,14 · 132 ) / 30 = 13,8 рад/с
ω3 = VA’ / lO2A’ = 1,5 / 0,147 = 10,2 рад/с
ω4 = VBC / lBC = 2,33 / 0,21 = 11,1 рад/с
ε3 = aτA’O2 / lA’O2 = 0,022 / 0,147 = 0,15 рад/с2
ε4 = aτВС / lBC = 0,16 / 0,21 = 0,76 рад/с2
| Номер звена | 1 | 2 | 3 | 4 | 5 |
| ω рад/с | 13,8 | 0 | 10,2 | 11,1 | 0 |
| ε рад/с2 | 0 | 0 | 0,15 | 0,76 | 0 |
1.6 Диаграммы движения выходного звена
Диаграмму перемещения S-t строим, используя полученную из плана положений механизма траекторию движения точки С.
Диаграммы скоростей V-t и ускорений a-t строим методом хорд.
Масштабные коэффициенты диаграмм :
KL = 0,001 m/mm
KT = 0,005 c/mm
KV = 0,003 m/c·mm
KA = 0,004 m/c·mm2
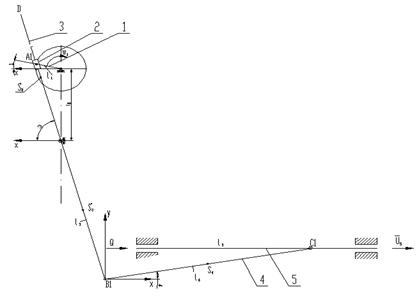
1.7 Аналитический метод анализа рычажного механизма
Положение точки А определяется уравнениями :
ХA = r · Sin( f );
YA = e + r · cos( f ).
Угол размаха кулисы можно определить по уравнению :
f = arctg ( XA / YA ).
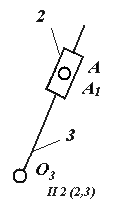
Скорость точки А1 , принадлежащей кривошипу 1 равна :
V = ω1 · r.
Скорость точки А3, принадлежащей кулисе 3 равна :
V = V · Cos( f – f3 ) = ω1 · r · Cos( f – f3 ).
Расстояние
AB=XA +YA=r · Sin(f) +e+2 · e · r · Cos(f)+r · Cos(f)=r+e+2 · e · r · cos( f ).
Угловая скорость кулисы :
ω = ωкр·λ·(λ+cos(f)) / (1+2λcos(f)+λ2)
Продифференцируем предыдущее уравнение по времени :
ε = ω2кр·a·r·((a2-r2)sin(f)) / (a2 + 2a·r·cos(f) + r2)2
Перемещение долбяка 5 :
X = r1 · Cos( f ) + l · Cos( arcsin((lO2B·sin (f))/lBC)).
Угол определим по формуле :
cos (f) = r/a
Скорость долбяка 5 определяется по формуле :
V = r·ωкр(sin(f) + 1/2·λ·sin2(f))
Ускорение долбяка 5:
a = r·ω2кр·(cos(f)+ λcos2(f))
Составляем программу для вычисления скоростей и ускорений долбяка 5 и для построения диаграмм скорости и ускорения долбяка 5.
Sub tron()
Dim a, e, h, r, n, w, fi, w1, alf As Double
Worksheets(1).Activate
a = Range("b2").Value
r = Range("b3").Value
n = Range("b4").Value
w1 = 3.14159265358979 * n / 30
alf = 0
h = 30 * 3.14159265358979 / 180
For n = 1 To Range("c2:c14").Count
F = Atn(r * Sin(alf) / (a + r * Cos(alf)))
fi = (180 / 3.14159265358979) * F
w = w1 * r * (r + a * Cos(alf)) / (a ^ 2 + 2 * a * r * Cos(alf) + r ^ 2)
e = w1 ^ 2 * a * r * (a ^ 2 - r ^ 2) * Sin(alf) / ((a ^ 2 + 2 * a * r * Cos(alf) + r ^ 2) ^ 2)
Range("c2:c14").Cells(n, 1) = fi
Range("c2:c14").Cells(n, 2) = w
Range("c2:c14").Cells(n, 3) = e
alfa = alf * 180 / 3.14159265358979
Range("c2:c14").Cells(n, 4) = alfa
alf = alf + h
Next n
End Sub
2. Силовой анализ рычажного механизма
2.1 Определение сил инерции
Исходные данные :
Масса кулисы 3 : m = 30 кг ;
Масса шатуна 4 : m = 10 кг ;
Масса долбяка 5 : m = 72 кг ;
Определяем веса звеньев :
G3’ = m3’ · g = 11,5 · 9,8 = 112,8519 H ;
G3” = m3” · g = 18,4845 · 9,8 = 181,104 H ;
G4 = m4 · g = 10 · 9,8 = 98 H ;
G5 = m5 · g = 72 · 9,8 = 705,6 H .
Сила полезного сопротивления : Q = 2000 H.
Вычисляем силы инерции :
U3’ = m3’ · aS3’ = 18,4845*2,56375 = 47,3896 H ;
U3” = m3“ · aS3“ = 11,5155*1,5875 = 18,28 H ;
U4 = m4 · aS4 = 10 · 2,3 = 23 H ;
U5 = m5 · aS5 = 72· 0,92= 66,24 H ;
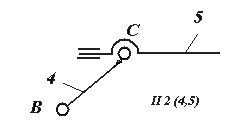
2.2 Расчёт диады 4-5
Составляем уравнение равновесия диады:
Σ P (4 ;5) = 0 ;
R50 + Q + U5 + G5 + U4 + G4 + Rτ43 + Rn43 =0
Составим сумму моментов сил звена 4:
Σ MC ( зв.4 ) = 0
G4 · hG4 + U4 · hU4 - Rτ43 · lBC = 0;
Rτ43 = ( G4 · hG4 + U4 · hU4 ) / lBC = ( 800 · 0,052 + 14,4 · 0,131 ) / 0,21 = 57,815 (Н)
Строим план сил диады 4-5 в масштабе:
Kp = Q/Q = 2000 / 200 = 10 H/мм ;
Считаем отрезки плана сил в мм.
Q = 2000 / 10 = 200 (мм); G5 = 705,6 / 10 = 70,56 (мм); U5 = 66,24 / 10 = 6,624 (мм);
G4 = 98 / 10 =9,8 (мм); U4 = 23 / 10 = 2,3 (мм);
Из плана сил определяем реакции
R43 = R43 · Kр = 209,92 · 10 = 2099,2 Н
R50 = R50 · Kр = 104,86 · 10 = 1048,6 Н
Похожие работы
... на VBA Ускорения Величина ускорения, м/с^2 0 1 2 3 4 5 6 7 8 9 10 11 12 Расчётные 4.4 2.54 1,50 -0,351 -0.99 -1.19 -3,80 -3.91 -6.8 -6.31 1,28 6.99 4.4 Графические 4.36 2.41 1,60 -0.324 -0.96 -1.09 -3,90 -3.88 -6.7 -6.161 1,30 6.924 4.36 2. Силовой анализ механизма Исходные данные: масса кулисы ; масса шатуна ; масса ползуна . сила полезного ...





... расчет На рисунке 25 представлен результат термодеформационного расчета. Рисунок 25 – Контурное представление результата термодеформационного расчета 5. Расчет экономического эффекта от модернизации поперечно – строгального станка мод. 7307 5.1 Исходные данные для расчета экономического эффекта от модернизации Проведенная модернизация поперечно-строгального станка мод. 7307 ...
... канавок, отрезки и других работ, которые могут быть выполнены перемещением поперечного суппорта, а также кронштейн 3 с щитком 4, защищающим рабочего от попадания стружки и смазочно-охлаждающей жидкости. Токарный станок имеет весьма древнюю историю, причем с годами его конструкция менялась очень незначительно. Приводя во вращение кусок дерева, мастер с помощью долота мог придать ему самую ...
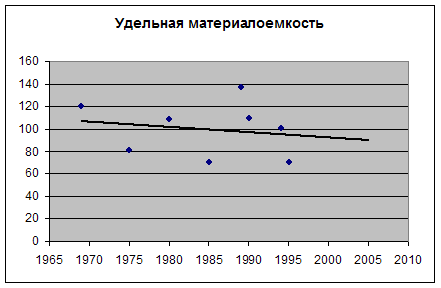
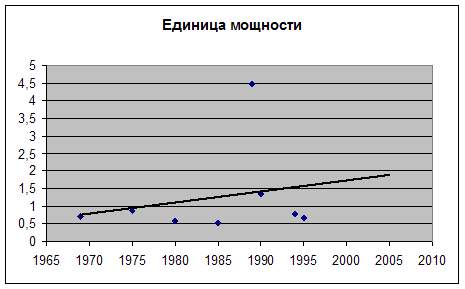
... . С определенной долей вероятности мы можем утверждать, что значение критерия снизится и составит 90 кг/мм. Полученная кривая свидетельствует об очевидном росте единицы мощности, приходящейся на единицу массы зубострогального станка. Прибегая к помощи метода аппроксимации, можно предположить возможное значение данного параметра в 2005 году, которое составит 1,9 Вт/кг. С помощью метода ...
0 комментариев