Навигация
КІНЕМАТИЧНІ ДІАГРАМИ РУХУ ТОЧКИ
29222
знака
2
таблицы
6
изображений
11 КІНЕМАТИЧНІ ДІАГРАМИ РУХУ ТОЧКИ
Згідно з аналітичним розрахунком будуємо діаграму переміщень. Кути повороту кривошипа відкладаємо вздовж вісі абсцис з масштабним коефіціентом μα=2 град/мм = π/90 рад/мм.
Масштабний коеф. часу µt= 60/(410*180) = 0,0015 с/мм.
Вдзовж вісі ординат відкладаємо значення переміщень точки Д, взятих з розрахунку на ЕОМ з масштабним коефіціентом
µs= 0.003 м/мм.
Методом графічного диференціювання будуємо діаграму швидкостей точки Д.
Для цього на від’ємному продовженні вісі абсцис відкладаємо полюсну відстань Н1= 24 мм з полюсом рV. Поділимо відрізок L=180мм на 12 рівних частин та відновимо ординати на кінцях кожної частини. З полюса проведемо промені, паралельні хордам на кожній частині графіка переміщень, до пересічення їх з віссю ординатю Значення ординат переносимо на середину відповідних частин. Отримані точки значень середніх швидкостей на всіх ділянках з’єднуємо плавною лінією. Це і буде діаграма швидкостей точки Д. Для порівняння побудуємо діаграму швидкостей за розрахунком на ЕОМ. Масштабний коефіціент:
µV=µs/(H1·µt) = 0.003/(24*0,0015)=0.082мс-1/мм.
Таким же чином диференціюємо діаграму швидкостей для побудови діаграми прискорень точки Д. Полюсна відстань Н2 = 16 мм. Та також перевіряємо отриману діаграму за допомоги розрахункових даних на ЕОМ (пунктирною лінією). Масштабний коеф. прискорення:
µа=µV/(H2·µ1)=0.082/(16·0.0015)=3.41 мс-2/мм.
12 КІНЕТОСТАТИЧНЕ ДОСЛІДЖЕННЯ МЕХАНІЗМУ
12.1 Визначення сил, що діють на механізм
На ланки механізму діють такі сили: ваги, інерції, корисного опору, моменти сил інерції, реакції в’язів та зрівноважуюча сила або момент сили. З цієї системи сил тільки реакції в’язів та зрівноважуюча сила або момент сили не можуть бути визначені з даних, що вже є.
Сили ваги
G2=m2·g=19*9,81=186,39 H
G3=m3·g=24*9.81=235,44 H
G4=m4·=29*9.81=284,49H
G5=m5·g=190*9.81=1863,9 H
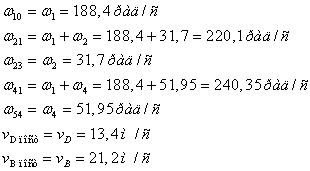
Моненти інерції ланок:



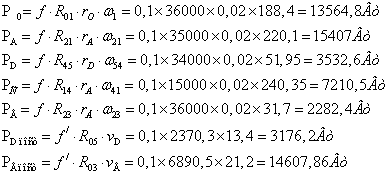
Сили інерції:
![]()
![]()
![]()
![]()
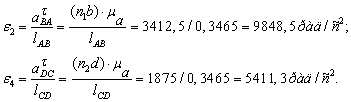
Моменти сил інерції:
![]()
![]()
![]()
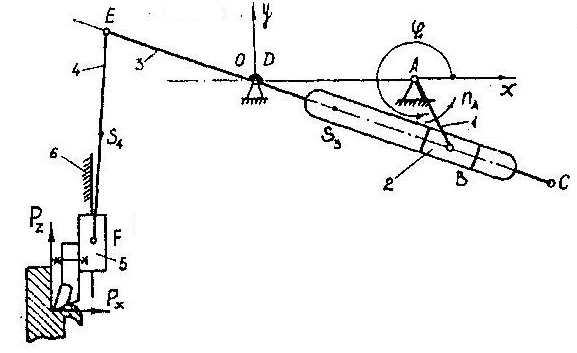
12.2 Графоаналітичний метод силового розрахунку механізму важіля
Графоаналітичний метод силового аналізу проводиться по групах Ассура.
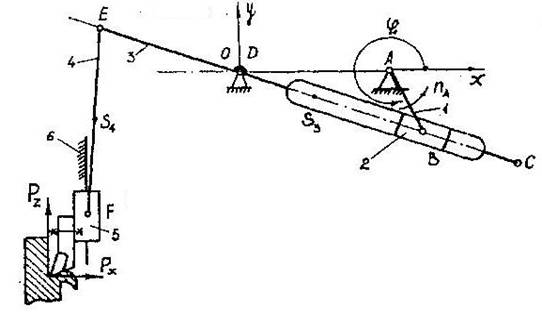
Досліджуємо сили, що діють на групу Ассура, складену з ланок 4 та 5 (див арк. 2) і у відповідальних точках прикладаємо зовнішні сили.
У графоаналітичному методі сили інерції і момент сили інерції замінюємо однією рівнодіючою, яка за величиною дорівнює силі інерції, співпадає з нею за напрямком, а точка прикладання знаходиться на відстані hi таким чином, щоб момент рівнодіючої сили відносно центра ваги співпадав за напрямком з моментом сили інерції.
Для ланки 4
Переносимо на креслення (арк. 2) з масштабним коефіціентом μ=0,0025; ![]() = 0,0049/0,004 = 0,123 мм
= 0,0049/0,004 = 0,123 мм
Реакції в кінематичних парах прикладаємо у вигляді двох складових, які напрямлені вздовж та перпендикулярно ланці. Для поступальної кінематичної пари направляюча – повзун, тому реакцію прикладаємо перпендикулярно направляючій.
Складаємо рівняння рівноваги для кожної ланки групи Ассура окремо![]()
![]()
З креслення визначемо плечі сил:
СД = 0,319 м
![]()
![]()
Для усієї групи Ассура складаємо векторне рівняння рівноваги:
![]()
Згідно цього рівняння складаємо силовий багатокутник.Вибираємо масштабний коефіціент μF=77 Н/мм.
Визначаємо інші реакції ( R05 та ![]() ):
):
R05 = 0 Н
![]() =
= ![]()
![]() =7716,39Н
=7716,39Н
R34=7716,39 H
Досліджуємо сили, що діють на группу Асура, складену з ланок 2 та 3 (див. аркуш 2) і у відповідних точках прикладаємо відповідні сили.
Сили та моменти сил інерції замінюємо рівнодіючими, які за величиною рівні силам інерції і прикладені на відстані ![]() та
та ![]() :
:
З урахуванням масштабного коефіціента μ=0,0025 знаходимо плечі рівнодійних на кресленні:
Складаємо рівняння моментів сил, що діють окремо на ланки 2 і 3 відносно точки В і визначаємо тангенціальні складові реакцій.
Для ланки 2:
![]() ,
,
де h2 = 0,117 м,
АВ = 0,291 м,
![]() .
.
І звідси :

Для ланки 3:
![]()
де О2В = 0,29 м,
h3 = 0,147 м,
![]() ,
,
![]() .
.
І звідси :
 Запишеио векторне рівняння рівноваги сил, що діють на групу Ассура, складену з ланок 2 і 3.
Запишеио векторне рівняння рівноваги сил, що діють на групу Ассура, складену з ланок 2 і 3.
![]() .
.
Будуємо план сил відповідно до цього рівняння і визначаємо величини та напрямки реакцій ![]() (див. арк. 2). Знайдемо довжини векторів сил на кресленні з масштабним коефіціентом μF=0,007Н/мм.
(див. арк. 2). Знайдемо довжини векторів сил на кресленні з масштабним коефіціентом μF=0,007Н/мм.
Визначаємо з креслення :
![]()
![]()
![]()
![]()
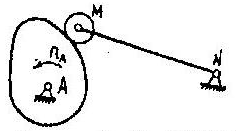
Розглянемо рух вхідної ланки. Вхідною ланкою механізму є кривошип 1, який здійснює обертальний рух. Привод у рух цієї ланки здійснюється від електродвигуна через планетарний редуктор і відкриту зубчату передачу коліс 4 і 5. Ланка 1 виконується разом з колесом 5, або жорстко з нею зв’зуються. На зубчате колесо з боку спряженого колеса 4 діє сила, яку називають зрівноважуючою, або рушійною. Накреслимо ведучу ланку разом з колесом 5 (див. аркуш 2).
Число зубів колеса 5 Z5 = 35, колеса 4 Z4 = 16, а модуль зубчатих колес m = 8 мм. З цих даних знайдемо радіусb колес 5 і 4:
r5 = m × Z5 / 2 = 140 мм.
r4 = m × Z4 / 2 = 64 мм.
Зрівноважуючу силу Рзр Прикладаємо в полюсі зачеплення коліс і 5 і направимо по лінії зачепленя, яка складає з дотичною до початкових кіл кут приблизно aw = 24°.
В точці А кривошипа прикладаємо силу реакції R12 з боку ланки 2. Величину та напрямок цієї реакції визначаємо з рівності ![]() .
.
Запишемо векторне рівняння рівноваги сил, що діють на вхідну ланку:
![]() .
.
Будуємо силовий трикутник відповідно векторного рівняння, з якого візначаємо сили Рзр і R01 ( масштабний коефіціент виберемо рівним μF=77Н/мм ). Тоді
З креслення визначаємо:
Fзр = 41,78*77=3217 Н,
R01 = 63,44*77=4484,88 Н.
Похожие работы
... сільськогосподарських машинах роблять колеса з широкими ободами? 10. Чи є якась різниця між тиском людини на підлогу, коли вона стоїть і коли ходить? Поясніть, ЕЛЕМЕНТИ СТАТИКИ МОМЕНТ СИЛИ Відділ механіки, який вивчає умови, при яких настає рівновага сил, що діють на тіло, називається статикою (від грецького слова “статос”, що означає стоячий). Кімнатні двері можуть повертатися навколо ...
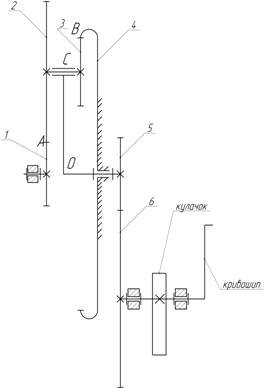
... Кутов координата кривошипу для силового аналiзу Кут повороту штовхача кулiсного механiзму Довжина штовхача Допустимий кут тиску Фазовi кути повороту кулачка: Тип діаграм Г 1. Кінематичне дослідження механізму 1.1 Структурний аналіз механізму Схема механізму привода конвеєра, який буде досліджуватися у цьому пункті, зображено на рис.6. Цей механізм складається з наступних ...
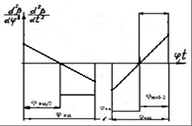
... довжина коромисла l для коромисловых кулачкових механізмів. Виходячи з умов обмеження кута тиску, визначають основні розміри ланок кулачкового механізму; мінімальний радіус кулачка, положення коромисла щодо центра обертання кулачка, проектують профіль кулачка графічним або аналітичним методами. 4.1 Побудова діаграм руху штовхача Вичерчуємо діаграму аналога прискорення коромисла , для чого на ...

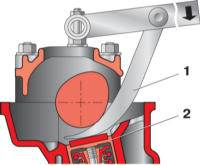
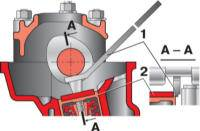
... порушенні теплового зазору в клапанному механізмі, нещільному закритті клапанів, зносі масловідвідних ковпачків. Зазор слід відрегулювати, зношені ковпачки поміняти, а клапани «притерти» до сідел. Експлуатація газорозподільного механізму двигуна. Звернете увагу на тепловий зазор між важелем і кулачком розподільного валу. Трохи знань фізики і можна зрозуміти, що цей зазор має бути строго певного ...
0 комментариев