Побудова планів швидкостей
Побудова планів прискорень
Побудова кінематичних діаграм для крапки В
Силовий розрахунок групи Ассура, що складає з ланок 4 і 5
Силовий розрахунок початкової ланки
Дослідження руху механізму й визначення моменту інерції маховика
Визначення наведених моментів інерції механізму
Проектування кулачкового механізму
Побудова профілю кулачка коромислового кулачкового механізму
Проектування евоволентного зачеплення прямозубих циліндричних коліс
Навигация
Кінематичний аналіз плоских важільних, кулачкових і зубчастих механізмів
Кінематичний аналіз плоских важільних, кулачкових і зубчастих механізмів
39583
знака
6
таблиц
7
изображений
Курсова робота
"Кінематичний аналіз плоских важільних, важільних, кулачкових і зубчастих механізмів"
Вступ
Ключові слова: механізм; машина; структурна група; кінематична пара; ланка; план швидкостей; план прискорень; сила.
Ціль курсового проекту: придбання практичних навичок по кінематичному аналізу й синтезу плоских важільних, важільних, кулачкових і зубчастих механізмів.
Методи проведення досліджень: аналітичний, графічний і графоаналітичний.
У даному проекті визначені структурні кінематичні й динамічні характеристики важільного механізму, спроектовані кулачковий і зубчастий механізми по заданих умовах.
1. Структурний аналіз механізму
Число ступенів волі механізму визначаємо по формулі П.Л. Чебишева.
![]()
де n – число рухливих ланок механізму,
p5 – число кінематичних пар п'ятого класу,
p4 – число Кінематичних пар четвертого класу.
У досліджуваному механізмі n=5, p5=7, p4=0, тобто
![]()
Отже, досліджуваний механізм має одна початкова ланка, і все ланки роблять цілком певні рухи.
Визначаємо клас механізму. Клас механізму визначається вищим класом групи Ассура, що входить до складу механізму. Визначення груп починаємо із самої вилученої від початкової ланки (кривошипа). Відокремлюємо гр. А. другого класу другого виду з ланками 2 і 3.
![]()
![]()
![]() A
A
![]() 2
2
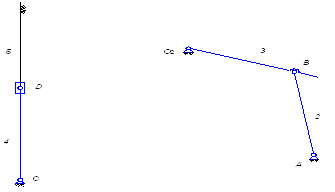
Потім відокремлюємо групу другого класу другого виду з ланками 4 і 5.
![]()
![]()
У результаті розподілу залишається механізм першого класу, до складу якого входить початкова ланка 1 і стійка 0.
![]() A
A
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() O
1
O
1
Формула будови механізму має вигляд
I (0; 1) II (2; 3)
II (4; 5)
Таким чином, даний механізм ставиться до II класу.
2. Кінематичне дослідження механізму
2.1 Побудова плану положень механізму
План положень механізму є основою для побудови кінематичних діаграм лінійного переміщення повзуну, або кутового переміщення вихідної ланки. Побудова плану положень механізму виконується в масштабі ml.

![]()
![]() ;
; ![]() ;
; ![]()
![]() ;
; ![]() .
.
![]()
![]()
![]()
![]()
![]()
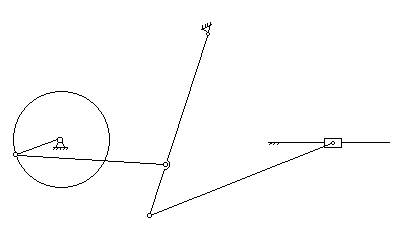
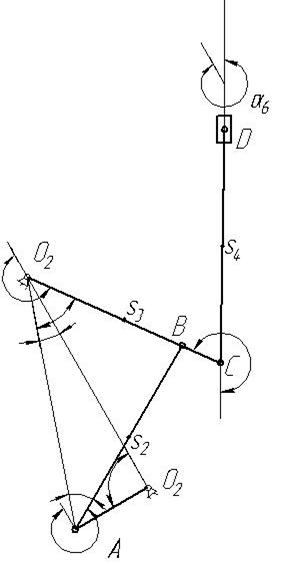
Вибираємо ml![]() м/мм. У цьому масштабному коефіцієнті робиться креслення кінематична схема механізму. На траєкторії крапки В повзуна 3 знаходимо її крайні положення. Крапки В0 і В6 будуть крайніми положеннями повзуну 3. За нульове положення механізму приймаємо крайнє ліве положення, а обертання кривошипа – за годинниковою стрілкою. Починаючи від нульового положення кривошипа ділимо траєкторію крапки A на 12 рівних частин і методом зарубок знаходимо всі інші положення ланок механізму. Для кожного положення механізму знаходимо положення центрів мас S2 і S4, з'єднавши послідовно крапки S у всіх положеннях ланок плавної кривої, одержимо шатунні криві.
м/мм. У цьому масштабному коефіцієнті робиться креслення кінематична схема механізму. На траєкторії крапки В повзуна 3 знаходимо її крайні положення. Крапки В0 і В6 будуть крайніми положеннями повзуну 3. За нульове положення механізму приймаємо крайнє ліве положення, а обертання кривошипа – за годинниковою стрілкою. Починаючи від нульового положення кривошипа ділимо траєкторію крапки A на 12 рівних частин і методом зарубок знаходимо всі інші положення ланок механізму. Для кожного положення механізму знаходимо положення центрів мас S2 і S4, з'єднавши послідовно крапки S у всіх положеннях ланок плавної кривої, одержимо шатунні криві.
Похожие работы
... додатку 1, рисунок 1[14], вариант 5. О2 3 1 О15 А 2 В Д 4 С Рис 1.1.Механізм важіля Механізм важіля складається з п’яти ланок, де ланка ...
0 комментариев