Выбор двигателя
Получение математической модели механики привода
Расчёт моментов инерции деталей привода
Моделирование привода в пакете DYNAR
РАЗРАБОТКА ПНЕВМАТИЧЕСКОГО ПРИВОДА ПЕРЕКЛЮЧЕНИЯ СКОРОСТЕЙ ШПИНДЕЛЯ СТАНКА 1740РФ3
Разработка математической модели состояния воздуха в полостях пневмоцилиндра
Навигация
Разработка электромеханического привода главного движения станка 1П756ДМ
Разработка электромеханического привода главного движения станка 1П756ДМ
23869
знаков
5
таблиц
25
изображений
Содержание
Введение
Техническое задание
1. Электропривод СТАНКА 1П756ДФ3
1.1 Кинематический анализ и выбор двигателя
1.1.1 Кинематический анализ
1.1.2 Выбор двигателя
1.2 Получение математической модели механики привода
1.2.1 Построение расчётной схемы привода
1.2.2 Расчёт моментов инерции деталей привода
1.2.3 Расчёт податливостей деталей привода
1.2.4Моделирование привода в пакете DYNAR
Техническое задание
2. РАЗРАБОТКА ПНЕВМАТИЧЕСКОГО ПРИВОДА ПЕРЕКЛЮЧЕНИЯ СКОРОСТЕЙ ШПИНДЕЛЯ СТАНКА 1П756ДФ3
2.1 Краткое описание пневмопривода и его работы
2. 2 Определение площади условного сечения регулирующей аппаратуры
2.3 Математическая модель механики привода
2.4 Математическая модель состояния газа в полости пневмоцилиндра
2.5 Разработка математической модели аэромеханики пневмопривода
2.6 Разработка схемы модели пневмопривода в приложении Simulink
2.7 Результаты моделирования и идентификация математической модели пневмопривода для САУ
Заключение
Список литературы
Введение
Автоматизированный электропривод играет в станкостроении и робототехнике исключительно важную роль. Его значение не ограничивается только преобразованием электрической энергии в механическую, хотя это одна из основных функций, выполняемых электроприводом в производственных машинах. Электропривод – это основной конструктивный элемент металлорежущего станка или робота.
Электропривод влияет на конструкцию станка и промышленного робота (ПР). Это влияние может проявляться непосредственно, поскольку конструкция любого узла станка зависит от конструкции и типа электродвигателя. Особое значение электропривод приобрёл на современном этапе развития машиностроения как основное звено автоматизации.
Техническое задание
В курсовой работе необходимо получить математическую модель механики привода в пакете SIMULINK, построить график АЧХ динамической податливости по углу в пакете DYNAR.
Исходные данные:
- обороты шпинделя n=1000 об/мин;
- момент инерции детали Jдет=0,025 кг*м²;
- диаметр детали Dдет=80 мм;
- сила резанья Pz=1500 Н;
- коэффициент перегрузки Kn=2,6;
- время разгона tраз=2,0 c;
1 ЭЛЕКТРОПРИВОД СТАНКА 1П756ДФ3
1.1 Кинематический анализ и выбор двигателя
1.1.1 Кинематический анализ и описание станка
На лицевой стороне консольной части станины станка крепится кронштейн, на котором установлена шпиндельная коробка. Привод монтируется на поворотной плите, которая болтами крепится к основанию станка. На кронштейне шарнирно установлен редуктор механизма привода главного движения, связанный с электродвигателем поликлиновой ременной передачей со шкивом. Вращение от выходного вала редуктора передается шпиндельной коробке через ременную передачу с двумя поликлиновыми ремнями. Натяжение ременной передачи осуществляется качанием корпуса редуктора на оси кронштейна с помощью гидроцилиндра.
Гидроцилиндр натяжения ремней подключен к гидросистеме по дифференциальной схеме: полости его соединены с полостями гидроцилиндра управления редуктором главного движения. Таким образом, усилие натяжения ремней – переменное и зависит от переключения диапазона частот вращения шпинделя. В первом диапазоне (до 630 или 800об/мин) оно равно 10 кН, а во втором диапазоне (до 2500 или 3150об/мин) – 4 кН. При включении гидросистемы пружина, встроенная в гидроцилиндр, создает предварительное усилие натяжения ремней, равное 1 кН.
Переключение диапазонов частот вращения шпинделя осуществляется гидроцилиндром. Шток гидроцилиндра связан с вилкой, перемещающей зубчатый блок и дополнительный венец с внутренними зубьями, который зацепляется с валом шестерней. Промежуточные зубчатые колеса и вместе с блоком обеспечивают дополнительную редукцию для получения 1-го диапазона частот вращения. Контроль переключения зубчатых передач редуктора осуществляют конечные выключатели.
Шпиндельная коробка станка выполнена в виде жесткого литого корпуса, в расточке которого смонтирован шпиндель на двух подшипниковых опорах и с предварительным натягом. В задней части шпинделя на шпонке установлен ведомый шкив поликлиновой ременной передачи. К торцу крепится шкив зубчато-ременной передачи привода датчика резьбонарезания, а также гидромеханизм привода зажимного патрона.
Базирование шпиндельной коробки на кронштейне , а кронштейна – на станине обеспечивает возможность регулирования положения оси шпинделя в горизонтальной и вертикальной плоскостях.
Определяем передаточное отношение между валом двигателя и валом передаточного механизма. Для этого по заданной скорости определяем передаточное отношение двигателя и добиваемся его реализации путем изменения числа зубьев в приводе, сохраняя при этом общее число зубьев в сумме.
На рисунке 1 приведена принципиальная кинематическая схема привода главного движения станка с учетом индивидуального задания, согласно которому общее передаточное отношение
![]() .
.
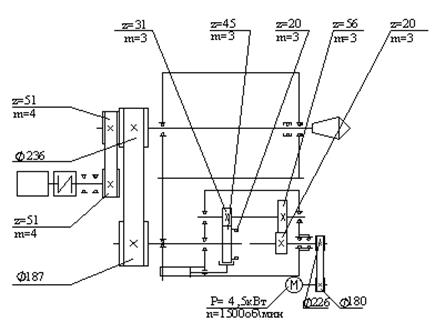
Рисунок 1 – Кинематическая схема привода
0 комментариев