Выбор двигателя
Получение математической модели механики привода
Расчёт моментов инерции деталей привода
Моделирование привода в пакете DYNAR
РАЗРАБОТКА ПНЕВМАТИЧЕСКОГО ПРИВОДА ПЕРЕКЛЮЧЕНИЯ СКОРОСТЕЙ ШПИНДЕЛЯ СТАНКА 1740РФ3
Разработка математической модели состояния воздуха в полостях пневмоцилиндра
Навигация
РАЗРАБОТКА ПНЕВМАТИЧЕСКОГО ПРИВОДА ПЕРЕКЛЮЧЕНИЯ СКОРОСТЕЙ ШПИНДЕЛЯ СТАНКА 1740РФ3
Разработка электромеханического привода главного движения станка 1П756ДМ
23869
знаков
5
таблиц
25
изображений
2 РАЗРАБОТКА ПНЕВМАТИЧЕСКОГО ПРИВОДА ПЕРЕКЛЮЧЕНИЯ СКОРОСТЕЙ ШПИНДЕЛЯ СТАНКА 1740РФ3
2.1 Краткое описание пневмопривода и его работы
Пневматическая система станка содержит: узел подготовки воздуха; пневмопанели (основную и вспомогательные для устройств смены инструментального барабана и зажима патрона); пневмогидроразводку (воздушные трубопроводы, шланги для подачи СОЖ в рабочую зону, трубопроводы для дозированной смазки направляющих и ходовых винтов суппорта).
Воздух, очищенный фильтрами, поступает к распределителю, от которого направляется к револьверной головке, инструментальному барабану и маслораспределителю. От маслораспределителя через клапан наполнения воздух поступает к основной и дополнительным панелям. Клапан наполнения служит для плавного увеличения давления в пневмосистеме и состоит из ходового клапана, дросселя с обратным клапаном, ходового клапана с глушителем и реле давления. При срабатывании ходового клапана с глушителем пневмосистема станка соединяется с узлом подготовки воздуха через дроссель.
При достижении необходимого давления срабатывают реле давления и ходовой клапан, соединяющий напрямую пневмосистему с узлом подготовки воздуха. Время наполнения регулируется дросселем. От клапана наполнения воздух поступает к распределительной колодке, откуда по трубопроводам направляется к пневмопанелям.
Пневмопанели станка включают в себя ходовые клапаны для управления исполнительными пневмоцилиндрами или соплами для обдувки воздухом базовых поверхностей. Расход воздуха регулируется дросселями, установленными параллельно с ходовыми клапанами, клапаны могут оснащаться глушителями. Наличие давления в выходных магистралях клапанов контролирует реле давления.
2.2 Определение площади условного сечения регулирующей аппаратуры
В качестве управляющей аппаратуры для пневмоцилиндра принимаем пневмораспределитель. Принципиальная схема системы изображена на рисунке17, на котором обозначены: 1 – компрессор, питающий систему, 2 – пневмоцилиндер, 3 – пневмораспределитель. При расчете системы принимается движение из крайнего левого положения в крайнее правое. Для выбора управляющей аппаратуры необходимо рассчитать площади условного прохода преобразовательного устройства. Для этого воспользуемся уравнением гидродинамики движения воздуха по трубопроводам:
![]() , (2.1)
, (2.1)
В формуле 2.1обозначены:
Q – требуемый объемный расход воздуха в нормальных м3/с;
Sдр – условная площадь дросселя, м3;
μ – кинематическая вязкость воздуха, 0,73;
ρ – плотность воздуха, 1,29 кг/м3;
р1, р2 – входное и выходное давление для полости, Па.
Входное давление р1 для левой полости является абсолютным давлением питания системы:
р1= рпит=0,4МПа.
Примем установившееся значение скорости движения поршня Vx равным 0,3 м/с. Значение давления в полости р2 при этом будет 0,35 МПа.
Требуемые расход также можно найти по формуле:
![]() , (2.2)
, (2.2)
где Sц – площадь цилиндра, м3;
Ратм – атмосферное давление, 0,1 МПа.
Площадь цилиндра Sц определяется по формуле:
![]() . (2.3)
. (2.3)
Из формул 2.2 и 2.3 получим выражение для расчета условной площади дросселя Sдр:
 , (2.4)
, (2.4)
 .
.

Рисунок 10 – Принципиальная схема управления пневмоцилиндром
2.3 Разработка математической модели механики пневмопривода
Математической моделью механики пневмопривода является дифференциальное уравнение, составленное по принципу Даламбера:
![]() , (2.5)
, (2.5)
где m - масса подвижной части, 50 кг;
Кж.тр. – коэффициент жидкостного трения поршня о цилиндр, (Н·м)/(м·с-1);
Sп – площадь поршня, 0,015м2;
Р1, Р2 – давление в левой и правой полостях соответственно, МПа;
Fс.тр. – сила сухого трения в уплотнениях пневмоцилиндра, Н;
Fтех. – технологическая сила – сила трения подвижной части привода о стальную поверхность, Н.
Коэффициент жидкостного трения поршня о цилиндр Кж.тр определяется по формуле:
![]() , (2.6)
, (2.6)
где ![]() .
.
![]() .
.
Сила сухого трения в уплотнениях пневмоцилиндра Fс.тр определяется по формуле:
![]() , (2.7)
, (2.7)
где dшт – диаметр штока, м;
![]() .
.
Диаметр штока принимаем равным 20% от диаметра поршня:
![]() .
.
По формуле 2.7 получаем:
![]() .
.
Сила трения подвижной части привода о стальную поверхность Fтех. находим из выражения:
![]() , (2.8)
, (2.8)
где k – кэффициент трения стали о стальную поверхность, 0,1;
m - масса подвижной части, 50 кг.
Находим Fтех.:
![]() .
.
Пусть ![]() , тогда уравнение 2.5 примет вид:
, тогда уравнение 2.5 примет вид:
![]() . (2.9)
. (2.9)
Преобразовав по Лапласу выражение 2.9 имеем:
![]() .
.
Получаем передаточную функцию механики привода W(s):
![]() . (2.10)
. (2.10)
Структурная схема S-модели механики пневмопривода изображена на рисунке 11.
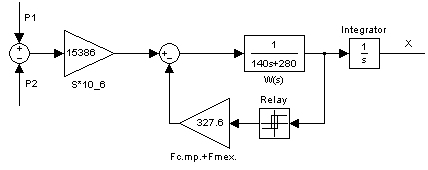
Рисунок11 – S-модель механики пневмопривода
0 комментариев