Навигация
Выбор рода тока и типа электропривода
58511
знаков
2
таблицы
27
изображений
3. Выбор рода тока и типа электропривода
Электропривод лифта должен удовлетворять следующим требованиям:
а) замыкание токоведущих частей электрического устройства привода тормоза (электромагнита и т.п.) на корпус не должно вызывать самопроизвольное включение этого привода и снятие механического тормоза при остановленном лифте и не должно нарушать наложение механического тормоза после отключения электродвигателя;
б) у лифта с номинальной скоростью более 0,71 м/с должна быть обеспечена возможность движения кабины с пониженной скоростью не более 0,4 м/с с учетом требования п. 6.3.33.
Электропривод переменного тока при питании электродвигателя непосредственно от сети должен удовлетворять следующим требованиям:
а) снятие механического тормоза должно происходить одновременно с включением электродвигателя или после его включения;
б) отключение электродвигателя должно сопровождаться наложением механического тормоза;
в) цепь главного тока электродвигателя должна прерываться двумя независимыми электромагнитными аппаратами, один из которых может быть концевым выключателем.
«Правила устройства электроустановок» рекомендуют начинать процесс выбора рода тока с двигателей переменного тока. Для привода механизмов, не требующих регулирования частоты вращения, независимо от их мощности, рекомендуется применять электродвигатели синхронные или асинхронные с короткозамкнутым ротором.
Для нерегулируемого привода выбор типа двигателя прост. Двигатели переменного тока проще по конструкции, стоимость их ниже, обслуживание тоже требует меньших затрат. При повторно-кратковременном режиме работы с частыми пусками и торможениями рационально использовать двигатели повышенного скольжения.
Электрический привод лифта состоит из электродвигателя, комплекта аппаратуры для управления и промежуточной передачи от двигателя к рабочему механизму. Применяют электродвигатели кранового и металлургического типов, а также общего назначения. Крановые электродвигатели имеют высокую механическую прочность, перегрузочную способность и меньший момент инерции ротора за счет малого его диаметра. В каталогах указываются номинальные данные двигателей при ПВ, равном 15, 25, 40, 60 и 100%.
Выбирается электропривод: металлургический АД с КЗ ротором. Так как для грузового лифта не требуется регулирование скорости в больших пределах, режим работы повторно-кратковременный (S3).
4. Расчет мощности и выбор приводного электродвигателя; определение передаточного числа, выбор редуктора
4.1 Выбор двигателяВыбор двигателя:
Фактическая продолжительность включения:
Время работы: tp = 80 с
![]()
Исходя из характера работы двигателя и фактической продолжительности включения, режим работы двигателя S5 – периодический повторно-кратковременный режим с влиянием пусковых процессов и электрическим торможением.
Продолжительность включений выбрана меньше полученного, следовательно необходимо проверить выбранный двигатель по нагреву.
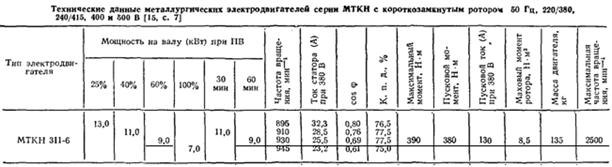
Исходя из Р и режима работы электропривода, выбираем двигатель MTKH 311–6, U=380В, f=50 Гц, P=9 кВт, защищенный с независимой вентиляцией (продуваемый), режим ПВ = 60%.
Таблица 4 – Паспортные данные двигателя:
4.2 Выбор редуктора
Для этого определяется скорость подъёма груза:

Vp – скорость подъема клети, м/с;
D – диаметр канатоведущего шкива, м.
Передаточное число редуктора определяется по номинальной скорости вращения выбранного двигателя и основной скорости движения исполнительного органа, по формуле:
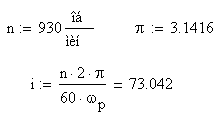
По рассчитанным данным наиболее выбирается редуктор:
Тип РГЛ‑200, i=75 (перед. число), =0.95 (К.П.Д).
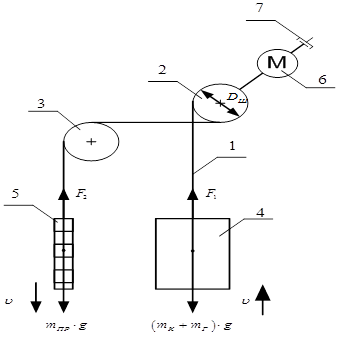
5. Расчёт приведенных статических моментов (моментов сопротивлений), моментов инерции и коэффициента жёсткости системы

r=Dш/2·ip, – радиус приведения поступательно движущихся масс к скорости wш.

Будем считать, что при подъеме кабины лифта w>0 и wш>0. Статический момент, преодолеваемый электродвигателем при подъеме кабины, если mкл³mпв.
Mстат=((mкл+ mгр) – mпв) gr/hрiр,

Статический момент, преодолеваемый электродвигателем при подъеме кабины равен: Mcтат = 0.688 Н·м.
Рассчитываем случай подъёма кабины лифта вверх (в данном случае кабина лифта загружена). Масса груза равна 5000 кг.
Приводим грузы к валу двигателя.
Моменты инерции клети, груза и противовеса приведенные к скорости вращения вала двигателя вычисляются по формулам:

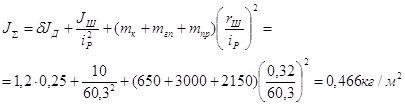
Определим суммарный момент инерции:
Определим моменты при подъёме:
Кабина лифта Противовес
![]()
Момент потерь в редукторе определяется текущими значениями нагрузки передачи. Его можно приближенно принять постоянным и равным моменту, соответствующему статическому режиму.
Момент сопротивления первой и второй масс соответственно равны:
Определим суммарный момент инерции привода с учетом одномассовости системы:
![]()
Определим коэффициент жёсткости:
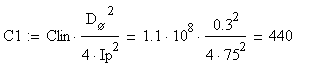
Clin – линейная жёсткость ![]() Н/м2
Н/м2
Определим жёсткость связи между первой и второй массами:
Для этого используется высота подъёма кабины h. (h=6м).
![]()

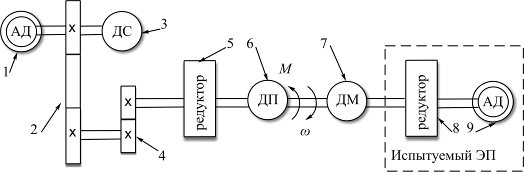
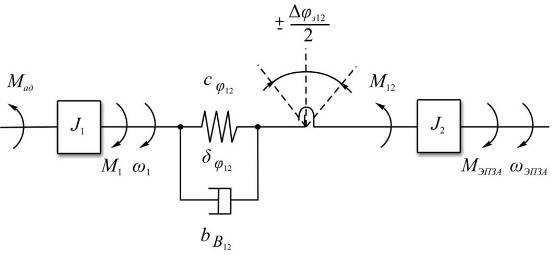
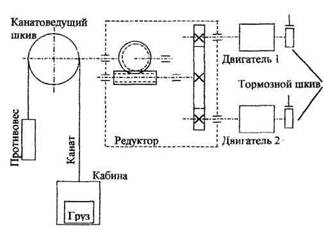
Данной кинематической схеме электропривода лифта соответствует структурная схема:
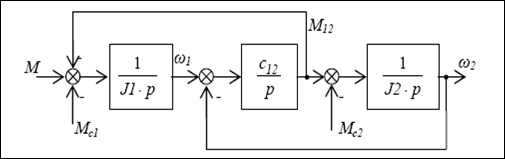
Рисунок 12 – Структурная схема электропривода лифта
Система уравнений двухмассовой системы (стр. 55 Ключев)

Обозначив d/dt=p, а ![]() запишем:
запишем:
![]()
![]()
Частота собственных колебаний двухмассовой упругой системы.

Возможность упрощения модели механической части электропривода тоесть представление последней в виде одномассовой (жесткой) системы можно оценить по значению отношения:
![]()
Поскольку значение γ12 незначительно превышает единицу (значение J2 составляет около 15% от значения J1), то можем считать J2 << J1. В таком случае можно представить механическую часть электропривода жестким приведенным звеном (рис13.), суммирующий момент инерции которого равен:
![]()
Суммирующий момент нагрузки при движении на подъём равен:
![]()
Динамический момент равен:
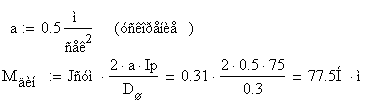

Рисунок 13 – Схема одномассовой системы
Уравнение движения одномассовой системы имеет вид:
М-Мс=Jсум·p·ω. (т.е Макт-Мсум=Jсум·p·ω).
Для построения механической характеристики нагрузки Мс(ω) в данном положении кабины лифта и противовеса нужно определить момент нагрузки предположении, что осуществляется опускание загруженной кабины лифта. В этом случае потенциальные (активные) моменты М1 и М2 сохраняют свое направление, а реактивный момент потерь Мр изменяет его на противоположное. Следовательно, при изменении знака скорости момент нагрузки изменяет свое направление:
M'c = М1+ (-М2)+ (-Мр) = 245.25 – 196.2 – 2.582 = 46.468 Н·м.
Механическая характеристика нагрузки показана на рис 14. При опускании кабины с грузом двигатель работает в тормозном режиме. Тормозной момент М= M'c совместно с моментом потерь Мр уравновешивают движущий активный момент
Макт = М1+ (-М2)= 245.25 – 196.2 =49.05Н·м.
обусловленный результирующим усилием на шкиве от разности масс загруженной кабины и противовеса.
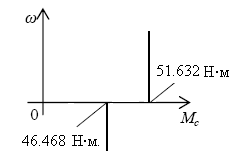
Рисунок 14 – Механическая характеристика нагрузки.
6. Предварительная проверка двигателя по нагреву и производительности
Определяем номинальную угловую скорость вращения ротора двигателя.
![]()
![]()
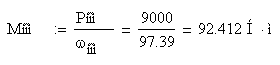
Определяем номинальный момент.
Определяем приведенное ускорение.
Определяем пусковой, установившийся и тормозной моменты:
Определяем время пуска:
Определяем время торможения
Время торможения равняется времени пуска
![]()
Путь, проходимый за время пуска (торможения) рабочей машиной (стр. 11, Драчев)

Время установившегося режима движения со средней скоростью.
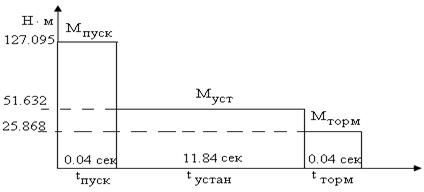
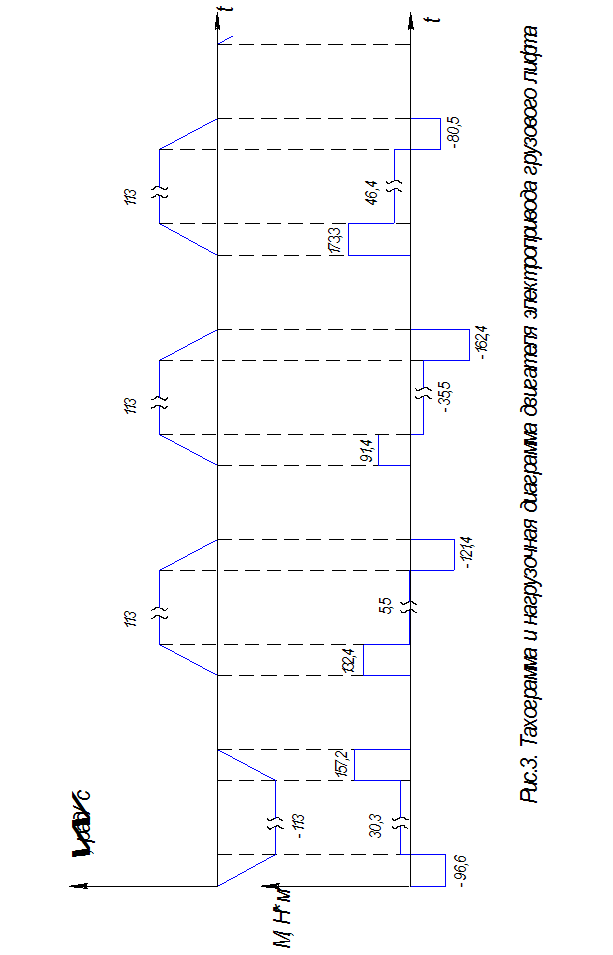
Рисунок 15 – Нагрузочная диаграмма при подъеме груза
Коэффициент ухудшения теплопроводности: β=0.5
При пуске и торможении скорость изменяется от 0 до ωном значит средняя скорость ωср=ωном/2, ωср=ωном/2=97,39/2=48,695 рад/сек.
Рассчитываем мощности на разных участках диаграммы.

Для проверки двигателей по нагреву применяются методы эквивалентного момента, эквивалентного тока и эквивалентной мощности.
Проверка выбранного двигателя методом эквивалентной мощности.
Эквивалентная мощность:

Мощность выбранного двигателя (9 кВт) больше рассчитанного, поэтому данный двигатель проходит по нагреву и его можно использовать в данной системе.
Сравнение пускового и максимального моментов с рассчитанными значениями.
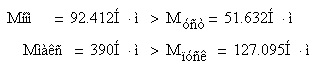
Из расчетов можно сделать вывод, что двигатель проходит по всем параметрам.
Расчеты производились при подъеме груза, а значит если данный двигатель сможет поднять груз, то он сможет его и опустить. Данный вывод можно сделать исходя из того, что при поднятии груза mg действует против направления груза, а при опускании – по направлению. Следовательно для опускания груза понадобится меньше мощности.
7. Допустимая частота пусков
Начальное скольжение.
![]()
Номинальное скольжение Sн и критическое скольжение Sк двигателя.
Номинальное скольжение:

Критическое скольжение:
![]()
![]()
Определяем критическую угловую скорость вращения ротора двигателя:
![]()
Номинальное напряжение, конструктивный коэффициент, мощность двигателя:
![]()
Механические потери:
Коэффициент вязкого трения:

Сопротивление ротора:
Сопротивление статора:
Индуктивность статора и ротора:
Индуктивность статора и индуктивность ротора должны быть приблизительно одинаковы.
![]()

![]()
Индуктивность рассеивания статора и индуктивность рассеивания ротора:

![]()
Взаимоиндукция:
![]()
Проверка конструктивного коэффициента:
Можно принять что С1 (1.068) совпадает с выбранным ранее с1 (1.066), (небольшая разница в полученных данных произошла в результате округлений данных в расчётах), значит конструктивный коэффициент выбран правильно.
Приведенное активное сопротивление ротора:
Потери энергии в статоре:

Потери энергии при нагрузке:
![]()
Средний момент:

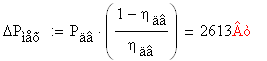
Потери энергии при пуске и торможении (Дж):

Потери мощности в номинальном режиме:
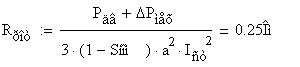
Допустимая частота включений:

Допустимая частота включений (по условию) Z =30, а допустимая частота включений двигателя (рассчитанная Z =530) значит по частоте включений двигатель вполне подходит.
8. Построение механической характеристики, используя формулу Клосса:

Для удобства производится также построение механической характеристики в логарифмическом масштабе.

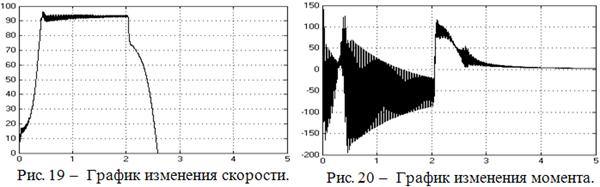
Рисунок 16 – Механическая характеристика двигателя
Графическим способом можно найти скольжение при пусковом и установившемся моментах (что и показано на графиках). Sпуск=0,11 (11%), Sуст=0,035 (3,5%).
Построение характеристики изменения скорости при изменении момента сопротивления на валу двигателя
β – жесткость механической характеристики электропривода.
Линеаризированная механическая характеристика асинхронного двигателя.


Рисунок 17 – Линеаризированная механическая характеристика
9. Построение переходных процессов
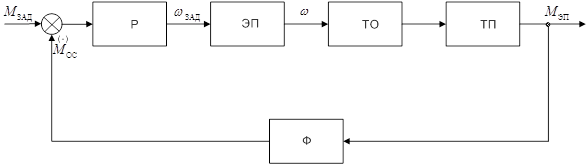
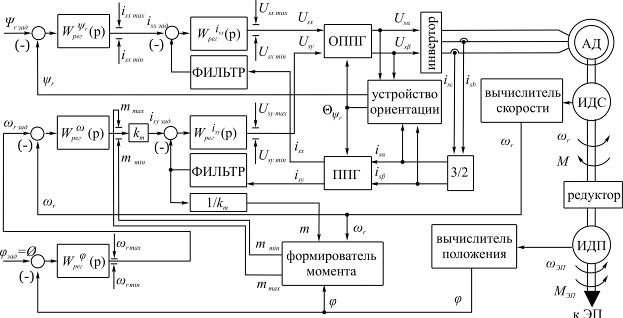
Все полученные в ходе проектирования данные вводятся в виртуальную электронную лабораторию (математический пакет) MATLAB, и производится построение переходных процессов.

Рисунок 18 – Структурная схема ЭП
Литература
1. Львов А.П. Справочник электромонтёра. – Киев: Вища школа, Главное издательство, 1980, – 376 стр.
2. П.С. Сергеев Проектирование электрических машин. Издательство «Энергия», 1970 г.
3. М.М. Кацман. Проектирование электрических машин. М. Энергоатомиздат, 1984 г.
4. Ключев В.И.: «Теория электропривода», Москва, Энергоатомиздат, 1985 г.
5. Герман-Галкин С.Г.: «Компьютерное моделирование полупроводниковых систем в MatLab 6.0», Санкт-Петербург, Корона Принт, 2001 г.
6. Иванченко Ф.К.: «Конструкция и расчет подъемно-транспортных машин», Киев, Вища Школа, 1983 г.
7. Драчев Г.И.: «Теория электропривода», Челябинск, ЮУрГУиздат, 2002 г.
8. Борцов Ю. А, Соколовский Г.Г. Автоматизированный электропривод с упругими связями. – СПб.: Энергоатомиздат, 1992.
Похожие работы
... фазной сети переменного тока напряжением 380В, частотой 50 Гц. Принимая во внимание полученную расчетную мощность двигателя можно с уверенностью считать, что независимо от системы электропривода, на которой будет реализовываться электропривод лифта, Данные параметры питающей сети могут обеспечить требуемое качество. В электроприводе лифта управление выполняется из различных мест: 1) из кабины ...
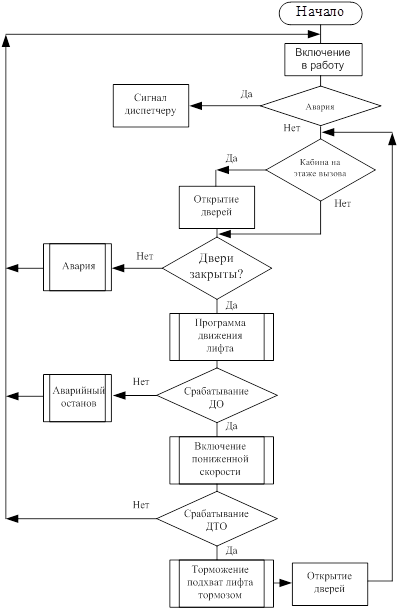
... элементов АСУ ТП 2.1 Разработка общих алгоритмов функционирования АСУ ТП. Блок – схемы алгоритма и их описание Система управления процессом испытания электропривода лифтов предназначена для управления нагрузочным электроприводом испытательного стенда в ручном или автоматическом режиме, разработана на базе микропроцессорного программируемого контроллера и выполняет следующие функции: ввод, ...
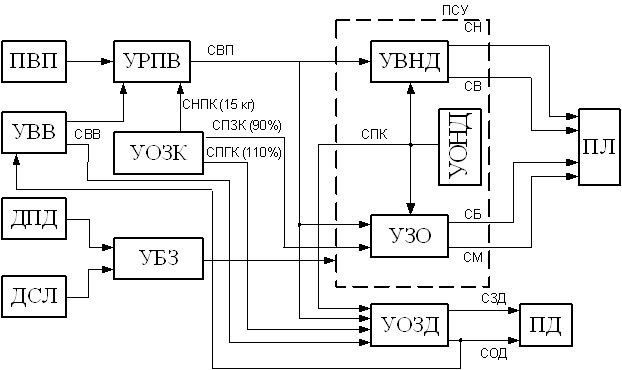
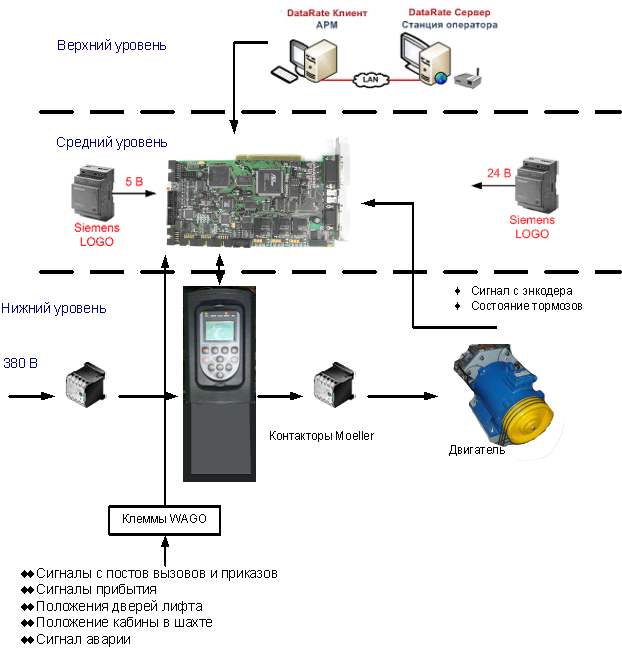
... кабины. Рисунок 4 – Функциональная структура управления 2.3 Определение уровней управления ТП и архитектуры верхнего уровня АСУ Для управления технологическим процессом передвижения пассажирского лифта необходимо наличие трёх уровней управления. Верхний уровень В последнее время наблюдается тенденция к оснащению зданий сложным инженерным и коммуникационным оборудованием. Появляется ...
... числа редуктора Расчет передаточного числа редуктора выполняется так, чтобы максимальной скорости рабочего органа механизма соответствовала номинальная скорость двигателя. Для привода грузового лифта: Расчет и построение нагрузочной диаграммы двигателя Для проверки предварительно выбранного двигателя по нагреву выполним построение упрощенной нагрузочной диаграммы двигателя (т.е. ...
0 комментариев