Общая характеристика и назначение металлорежущих станков, для которых проектируется привод
Особенности проектирования привода
Выбор предельных режимов резания и электродвигателя
Технические требования к приводу станка
Расчет погрешностей кинематических цепей станка
Расчет на прочность зубчатых колес
Расчет второй передачи
Расчет третьей передачи
Расчет геометрических параметров зубчатых колес
Выбор и расчет шпоночных соединений
Выбор ирасчет муфт
Навигация
Технические требования к приводу станка
Расчет коробки подач горизонально-фрезерного станка
40728
знаков
2
таблицы
7
изображений
3. Технические требования к приводу станка
Приводы металлорежущих станков предназначены для осуществления рабочих, вспомогательных и установочных перемещений инструментов и заготовки. Их делят на приводы главного движения - скорости резания и приводы подач – координатных перемещений. К каждому виду привода, с учетом служебного назначения станка ,предъявляют свои специфические требования по передаче силы, обеспечению постоянства скорости, ее изменения и настройки, точности перемещения и погрешности позиционирования узла, быстродействию, надежности, стоймости, габаритным размерам.
Важнейшим и исходными данными для проектирования привода главного движения являются диапазон регулирования частоты вращения и мощности передаваемые приводом.
В данном проекте рассматривается привод с бесступенчатым регулированием скорости. Основные достоинства приводов с бесступенчатым регулированием – повышение производительности обработки за счет точной настройки оптимальной по режимам резанием скорости, возможность плавного перемещения скорости во время работы, простота автоматизации процесса переключения скоростей. Производительность станка определяется его способностью обеспечивать обработку определенного числа деталей в единицу времени.
Для сравнительной характеристики технического уровня станков и его оборудования используют набор показателей таких как: производительность, надежность, эффективность, удобство в обслуживании.
Свойство станка обеспечивать бесперебойный выпуск годной продукции в заданном количестве в течении определенного срока службы называют надежностью станка. Надежность станка определяется долговечностью и ремонтноспособностью станка.
Точность станка предопределяет в основном точность обработанных на нем изделий. Различают геометрическую точность, кинематическую точность а также жесткость станка.
4. Кинематический расчет привода станка
4.1 Диапазоны регулирования станка
Определяем диапазоны регулирования привода:
Определяем диапазоны регулирования двигателя:
![]()
Определяем диапазоны регулирования двигателя при постоянной мощности:
![]()
Определяем диапазоны регулирования двигателя при постоянном моменте:
![]()
Определяем диапазоны регулирования шпинделя при постоянной мощности:
![]()
Для определения бесступенчатого регулирования частоты вращения шпинделя при постоянной мощности знаменатель ряда передаточных отношений передач коробки скоростей φ1 принимаем равным RдР.
Требуемое число ступеней коробки скоростей:
![]()
Принимаю Z=2
При постоянной мощности диапазон регулирования шпинделя:
![]() .
.
Минимальная частота вращения при постоянной мощности:
![]()
4.2 Разработка и построение структурных сеток и графиков чисел оборотов
По заданному числу z=2 определяем возможные типы схем сложенных структур , т.к. простые множительные структуры не используем.
Общий вид типовой структуры главного привода станка на рис. 4.1
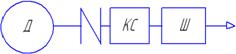
Рисунок 4.1 -Типовая структура главного привода станка.
Структурная сетка коробки скоростей приведена на рис. 4.2
![]()
Рисунок 4.2 - Структурная сетка.
График чисел оборотов приведен на рис.4.3
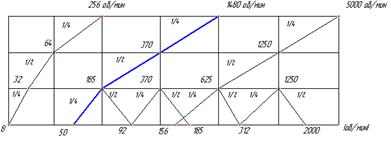
Рисунок 4.3-График чисел оборотов
4.3 Выбор чисел зубьев и определение действительных частот вращения
4.3.1 Подбор чисел зубьев
Для подбора чисел зубьев воспользуемся графиком чисел оборотов (рис.4.3) и значениями передаточных отношений I между звеньями коробки главного движения.
Передаточные отношения:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]()
Подбираем числа зубьев [5,стр.121,табл.3]:
z1 = 16; z2 = 64; z3 = 30; z4 = 60; z5 = 40; z6 = 40; z7 = 16; z8 = 64; z9 = 30; z10 = 60;
0 комментариев