Общая характеристика и назначение металлорежущих станков, для которых проектируется привод
Особенности проектирования привода
Выбор предельных режимов резания и электродвигателя
Технические требования к приводу станка
Расчет погрешностей кинематических цепей станка
Расчет на прочность зубчатых колес
Расчет второй передачи
Расчет третьей передачи
Расчет геометрических параметров зубчатых колес
Выбор и расчет шпоночных соединений
Выбор ирасчет муфт
Навигация
Расчет погрешностей кинематических цепей станка
Расчет коробки подач горизонально-фрезерного станка
40728
знаков
2
таблицы
7
изображений
4.3.2 Расчет погрешностей кинематических цепей станка
![]()
![]()
 ,
,
![]()

![]()

![]()

![]()

В результате проверки всех основных цепей можно сделать вывод, что числа зубьев колес подобраны правильно и погрешности цепей не превышают допустимую погрешность.
4.3.3 Разработка кинематической схемы привода
На основании графика частот вращения и найденных значений чисел зубьев составляем принципиальную кинематическую схему привода главного движения станка (рис.5.1).
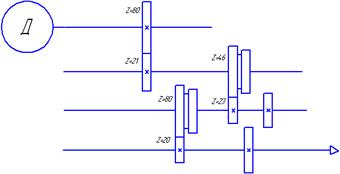
Рисунок 5.1 - Кинематическая схема привода главного движения станка
5. Силовой расчет привода станка
5.1 Расчет коэффициента полезного действия
Определяем эффективную мощность станка затрачиваемую на процесс резания:
![]()
5.2 Мощность холостого хода
Для станков с главным вращательным движением приблизительно можем найти по такой формуле:
![]()
![]()
где dср. – среднее арифметическое в мм. диаметров всех опорных (подшипниковых) шеек валов коробки скоростей станка. dср=30…50мм. dшп. - среднее арифметическое в мм. диаметров всех опорных шеек шпинделя. (70…120мм.). С =2 (для подшипников скольжения); n1, n2, n3 – частоты вращения в мин-1 валов коробки скоростей.
5.3 Расчетный КПД станка
Определяют в зависимости![]() :
:
![]() ;
;
![]()
5.4 Мощность главного двигателя
Мощность главного двигателя определяют по формуле:
![]()
![]()
Из выше перечисленных расчетов можновыбрать двигатель безступенчатым изменением скоростей. Выбираем двигатель серии 4П, ближайший по мощности двигатель 4ПФ112S с креплением на фланце, мощностью ![]() кВт, частотой вращения
кВт, частотой вращения ![]() .
. ![]() ;
; ![]() ;
; ![]() ;
; ![]()
5.5 Определение коэффициента полезного действия
![]()
Определение коэффициента полезного действия станка производим позависимости:
![]() ;
;
Где Nдв.ф. – мощность электродвигателя по подобраному каталогу.
КПД станков с главным вращательным движением должен быть не ниже 0,7.
![]()
5.6 Расчет крутящих моментов на валах приводов станков
Мкр.вал = 9740![]() [Н·м];
[Н·м];
где ![]() - номинальная мощность главного электродвигателя в кВт;
- номинальная мощность главного электродвигателя в кВт;
![]() - кпд механизма от вала электродвигателя до рассматриваемого вала;
- кпд механизма от вала электродвигателя до рассматриваемого вала;
![]() -расчетная частота вращения вала в мин-1;
-расчетная частота вращения вала в мин-1;
Mkp.1 = 9750· Н·м;
Н·м;
M’kp.2 = 9750·![]() Н·м;
Н·м;
M’’kp.3 = 9750· Н·м;
Н·м;
M’kp.4= 9750·![]() Н·м;
Н·м;
6. Прочностной расчет основных элементов коробки скоростей
0 комментариев