Навигация
ПОСТРОЕНИЕ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ОБЪЕКТА УПРАВЛЕНИЯ
25029
знаков
2
таблицы
21
изображение
2 ПОСТРОЕНИЕ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ОБЪЕКТА УПРАВЛЕНИЯ
2.1 Методы математического описания объектов управления
Для построения высокоэффективной системы управления необходимо иметь описание объекта управления в виде математической модели.
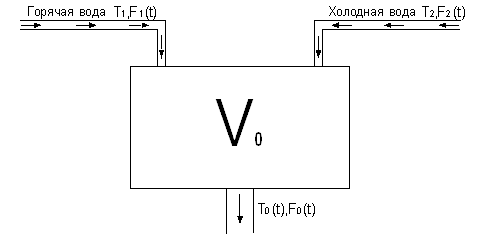
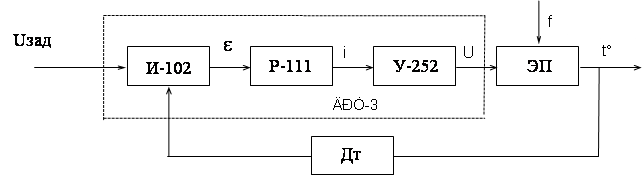
Для описания объектов управления, в которых отсутствует зависимость переменных состояния, управления от пространственных координат (линейные многомерные системы с сосредоточенными параметрами), используются системы линейных обыкновенных дифференциальных уравнений или соответствующие изображения по Лапласу. Рассмотрим многомерную линейную систему с m управлениями, l возмущениями и k входами. Модель линейной системы с сосредоточенными параметрами во временной области:
![]()
где х(t) – вектор состояния системы, ![]() ;
;
u(t) – вектор управлений (входов), ![]() ;
;
у(t) – вектор выходов, ![]() ;
;
f(t) – вектор возмущений, ![]() ;
;
А – матрица размерности n x n;
В – матрица размерности n x m;
D – матрица размерности n x l;
С – матрица размерности k x n.
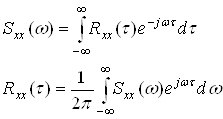
Применяя преобразование Лапласа к системе, получим эквивалентную модель в комплексной области:
![]()
Частотное или временное представления выбираются из соображений удобства, так как в случае постоянных матриц A, B,C и D они эквивалентны.
Для построения подобных моделей можно использовать два пути: применять фундаментальные физические соотношения в виде законов сохранения вещества, энергии или восстанавливать параметры моделей по эмпирическим данным, причем второй путь более часто применяется на практике.
2.2 Экспериментальные данные
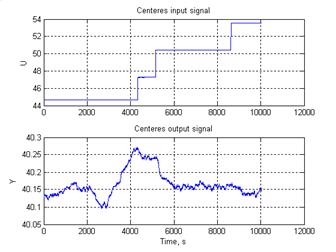
Для построения математической модели объекта управления использовался метод восстановления параметров модели по эмпирическим данным. Для этого с помощью лабораторной установки были получены экспериментальные данные для исследования объекта управления и построения его математической модели. Результаты снятия экспериментального переходного процесса приведены в Приложении Б. Полученные данные были аппроксимированы в среде научных исследований MatLab. В результате получился график переходного процесса, представленный на рисунке 2.1.
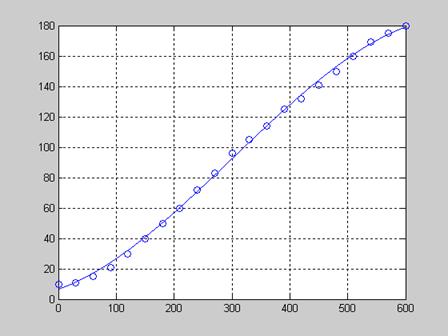
Рисунок 2.1 – Экспериментальный переходный процесс
На рисунке 2.1 по оси ординат отложена температура в °C, а по оси абсцисс – время в секундах. При этом на самом графике кружочками обозначены непосредственно экспериментальные точки, определенные в дискретные моменты времени.
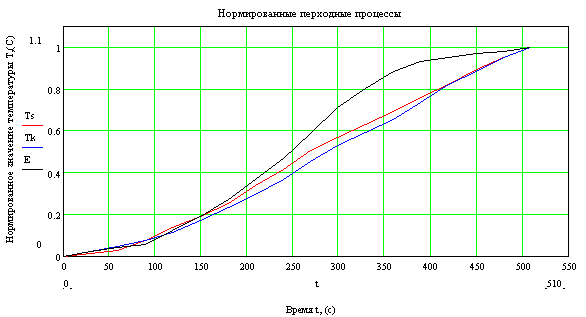
Нормированный переходный процесс представлен на рисунке 2.2.
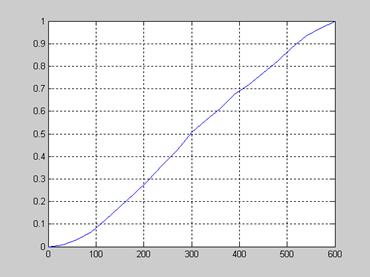
Рисунок 2.2 – Нормированный переходный процесс
Структура аппроксимирующего выражения для передаточной функции объекта может быть выбрана в общем случае в виде:
![]()
Коэффициент усиления объекта управления Kо можно найти по графику переходного процесса. Постоянные времени передаточной функции могут быть найдены методом площадей, геометрическим и методом Ротача.
2.3 Нахождение коэффициента усиления
Коэффициент усиления может быть определен из следующего соотношения:
![]()
Отсюда получаем, что ![]() .
.
2.4 Построение математической модели звена первого порядка геометрическим методом
Звено первого порядка с запаздыванием имеет следующий вид:
![]()
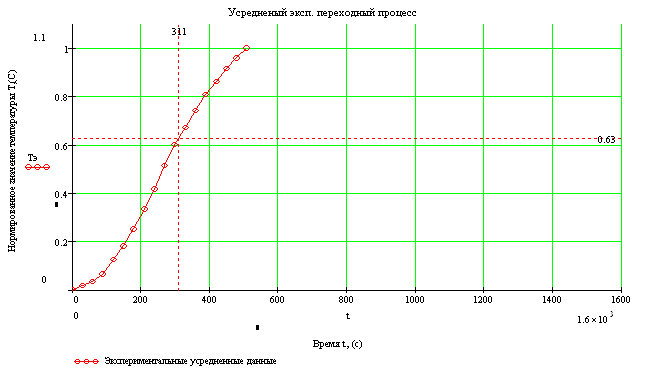
Для определения величины запаздывания и постоянной времени обратимся к графику переходного процесса (рисунок 2.1). Для нахождения постоянной времени необходимо провести прямую до пересечения с графиком процесса параллельно оси абсцисс на уровне 0.63kc (см. рисунок 2.3).
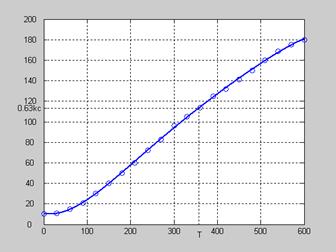
Рисунок 2.3 – Определение постоянной времени по переходному процессу
Постоянная времени T = 360.53 (с). ![]() . Построим переходный процесс для такого звена и посмотрим насколько он совпадает с экспериментальным.
. Построим переходный процесс для такого звена и посмотрим насколько он совпадает с экспериментальным.
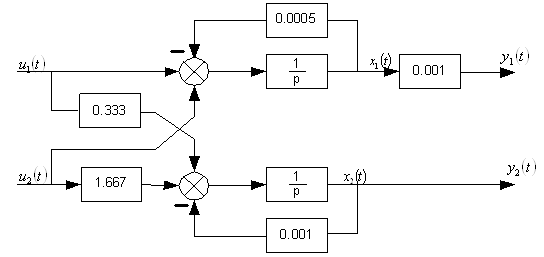
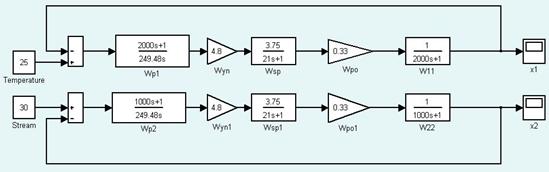
Схема модели в MatLab представлена на рисунке 2.4.
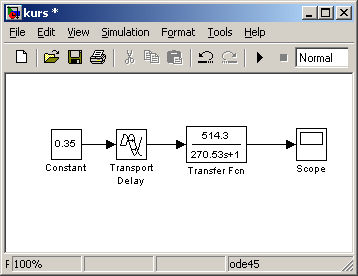
Рисунок 2.4 – Схема модели
Полученный переходный процесс представлен на рисунке 2.5.

Рисунок 2.5 – Переходный процесс, полученный по передаточной функции ![]()
Таким образом, передаточная функция объекта в данном случае имеет следующий вид:
![]()
Похожие работы
... несчастных случаев. Рассмотрен вопрос о мероприятиях по защите окружающей среды. 7. Технико-экономическое обоснование проекта 7.1. Выбор и обоснование аналога В качестве аналога автоматизированной системы управления тепличным хозяйством выберем комплекс «АСУ «Теплица» ЗАО “НАНКО”, который реализует следующие основные функции: · регистрацию и отображение значений контролируемых ...
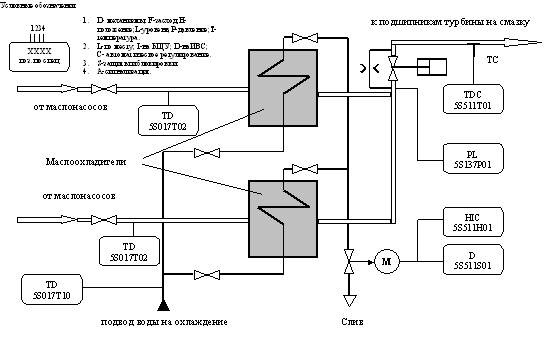
... : - по маслу 20кПа - по воде 20,1кПа Максимальное рабочее давление: - масла 0,5Мпа - воды 0,5МПа Функциональная схема системы регулирования температуры смазочного масла приведена на рис. 9. Она содержит два маслоохладителя параллельно ...
... . Алгоритм управления показывает, как должно изменяться управление u, чтобы обеспечить заданный алгоритм функционирования. Алгоритм функционирования в автоматической системе реализуется с помощью управляющих устройств. В основе используемых в техники алгоритмов управления лежат некоторые общие фундаментальные принципы управления, определяющие, как осуществляется увязка алгоритма управления с ...
... и науки Украины Севастопольский национальный технический университет Кафедра технической кибернетики КУРСОВОЙ ПРОЕКТ по дисциплине «Системы автоматики» на тему: «Разработка и исследование системы автоматического регулирования температуры электропечи на базе промышленного регулятора Р-111» (пояснительная записка) Выполнил: ст. гр. А-41з Брусинов С.Э. Проверил: профессор ...
0 комментариев