Навигация
Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. М. "Наука",1975
25029
знаков
2
таблицы
21
изображение
1. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. М. "Наука",1975.
2. Ротач В.Я. Расчет динамики промышленных автоматических систем. М. "Энергия".1973.
ПРИЛОЖЕНИЕ А (ОБЯЗАТЕЛЬНОЕ)
Экспериментальные данные для получения передаточной функции объекта
| t, с | T, °C | ε, В |
| 0 | 10 | 0.17 |
| 30 | 11 | 0.17 |
| 60 | 15 | 0.21 |
| 90 | 21 | 0.3 |
| 120 | 30 | 0.4 |
| 150 | 40 | 0.55 |
| 180 | 50 | 0.7 |
| 210 | 60 | 0.89 |
| 240 | 72 | 1.09 |
| 270 | 83 | 1.28 |
| 300 | 96 | 1.47 |
| 330 | 105 | 1.69 |
| 360 | 114 | 1.89 |
| 390 | 125 | 2.1 |
| 420 | 132 | 2.3 |
| 450 | 141 | 2.52 |
| 480 | 150 | 2.71 |
| 510 | 160 | 2.90 |
| 540 | 169 | 3.08 |
| 570 | 175 | 3.24 |
| 600 | 180 | 3.4 |
ПРИЛОЖЕНИЕ В (РЕКОМЕНДУЕМОЕ)
Листинг m-файла
clear; clc;
%Исходные данные: время t в секундах, температура T в градусах Цельсия и
%рассогласование E в вольтах:
t(1)=0;
for i=2:21
t(i)=t(i-1)+30;
end
T=[10 11 15 21 30 40 50 60 72 83 96 105 114 125 132 141 150 160 169 175 180];
E=[0.17 0.17 0.21 0.3 0.4 0.55 0.7 0.89 1.09 1.28 1.47 1.69 1.89 2.1 2.3 2.52 2.71 2.9 3.08 3.24 3.4];
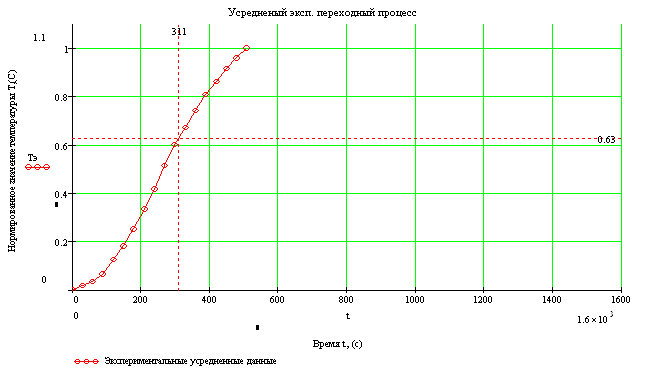
%Построение экспериментальных точек
figure
plot(t, T, 'o');
grid on;
hold on;
%График экспериментального переходного процесса
%Регрессия 3-ого порядка
p3 = polyfit(t, T, 3);
ti = 0:0.01:600;
P3 = polyval(p3, ti);
plot(ti, P3);
%Нормирование исходных данных
Tfin = 180;
Tbegin = 10;
for i=1:21
Tnorm(i)=(T(i)-Tbegin)/(Tfin-Tbegin);
end;
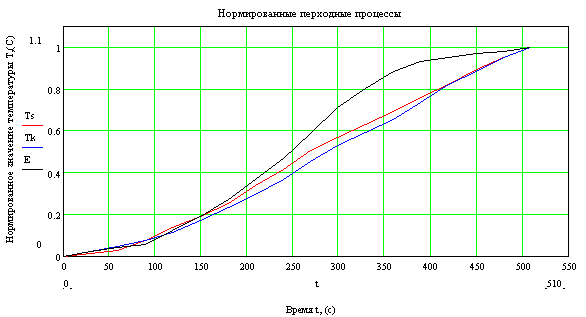
%Нормированный график переходного процесса
figure
plot (t, Tnorm);
grid on;
%Построение звена второго порядка методом площадей
delta1 = 1 - Tnorm;
figure
plot(t, delta1);
grid on;
for i=1:21
delta2(i) = t(i) * delta1(i);
end
figure
plot(t, delta2);
grid on;
%Определение площадей
S1=trapz(t, delta1)
S2=trapz(t, delta2)
a1=S1;
if ((S2/(S1^2)) > 0.75)
a2=S1^2-S2
a1=S1
%Расчет постоянных времени
T1=a1/2+sqrt((a1^2)/4-a2)
T2=a1/2-sqrt((a1^2)/4-a2)
else
%Метод грубых площадей
%Найдем точку перегиба
t1=90:30:600;
delta_1=[0.9353
0.8824
0.8235
0.7647
0.7059
0.6353
0.5706
0.4941
0.4412
0.3882
0.3235
0.2824
0.2294
0.1765
0.1176
0.0647
0.0294
0];
k = 514.3;
delta_2=k*delta_1;
delta_2tn=0.9353*k;
In=trapz(t1,delta_2);
T1=In/delta_2tn
T2=a1-T1
T_1=T1*T2;
T_2=T1+T2;
%строим передаточную функцию и по ней переходный процесс для звена
%второго порядка
tf_reg=tf([k],[T_1 T_2 1])
figure
step(tf_reg, 600);
grid on;
end;
Похожие работы
... несчастных случаев. Рассмотрен вопрос о мероприятиях по защите окружающей среды. 7. Технико-экономическое обоснование проекта 7.1. Выбор и обоснование аналога В качестве аналога автоматизированной системы управления тепличным хозяйством выберем комплекс «АСУ «Теплица» ЗАО “НАНКО”, который реализует следующие основные функции: · регистрацию и отображение значений контролируемых ...
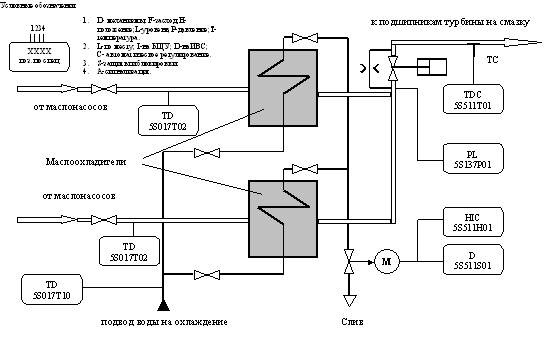
... : - по маслу 20кПа - по воде 20,1кПа Максимальное рабочее давление: - масла 0,5Мпа - воды 0,5МПа Функциональная схема системы регулирования температуры смазочного масла приведена на рис. 9. Она содержит два маслоохладителя параллельно ...
... . Алгоритм управления показывает, как должно изменяться управление u, чтобы обеспечить заданный алгоритм функционирования. Алгоритм функционирования в автоматической системе реализуется с помощью управляющих устройств. В основе используемых в техники алгоритмов управления лежат некоторые общие фундаментальные принципы управления, определяющие, как осуществляется увязка алгоритма управления с ...
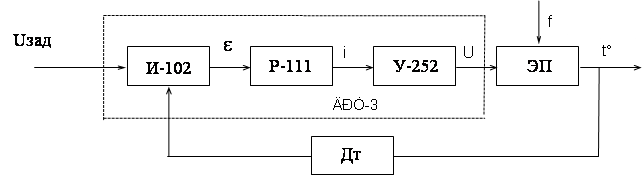
... и науки Украины Севастопольский национальный технический университет Кафедра технической кибернетики КУРСОВОЙ ПРОЕКТ по дисциплине «Системы автоматики» на тему: «Разработка и исследование системы автоматического регулирования температуры электропечи на базе промышленного регулятора Р-111» (пояснительная записка) Выполнил: ст. гр. А-41з Брусинов С.Э. Проверил: профессор ...
0 комментариев