Навигация
Характеристика электродвигателя
22139
знаков
0
таблиц
20
изображений
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ
Кафедра Автоматизации производственных процессов
Курсовая работа
по дисциплине
«Основы теории электропривода»
2007СОДЕРЖАНИЕ
РЕФЕРАТ
Введение
1. Выбор электродвигателя по мощности
1.1 Статическая нагрузочная диаграмма электропривода
1.2 Предварительный выбор электродвигателя по мощности и скорости
1.3 Динамическая нагрузочная диаграмма электропривода
1.4 Проверочный расчет электродвигателя по нагреву
1.5 Проверочный расчет электродвигателя по условиям пуска
1.6 Проверочный расчет электродвигателя по условиям допустимой перегрузки
2. Механические характеристики электропривода в рабочих режимах
2.1 Расчет и построение естественной и рабочей механических характеристик электропривода в двигательном режиме работы, определение величины сопротивления рабочей секции, статизма электропривода
2.2 Определение максимально возможного диапазона регулирования скорости привода при реостатном способе регулирования и регулирования скорости изменением напряжения
2.3 Определение необходимого статизма при увеличении диапазона регулирования в 10 раз с указанием способа снижения статизма
2.4 Расчет и построение статической пусковой диаграммы электропривода
2.4.1 Определение количества пусковых ступеней и секций, величин их сопротивлений
2.4.2 Определение плавности регулирования скорости при использовании пусковых сопротивлений в качестве регулировочных
2.4.3 Разработка силовой электрической схемы электропривода с учетом технологических условий работы механизма
2.5 Расчет и построение механических характеристик электропривода в тормозных режимах
2.5.1 Расчет и построение механической характеристики при силовом спуске пустой крюковой подвески в режиме рекуперативного торможения, определение величины сопротивления секции противовключения
2.5.2 Расчет и построение механической характеристики при спуске номинального груза с номинальной рабочей скоростью, определение величины тормозного сопротивления
2.5.3 Расчет и построение механической характеристики при спуске номинального груза с остановочной скоростью, определение величины тормозного сопротивления
3. Электромеханические переходные процессы в электроприводе
3.1 Расчет и построение графиков переходных процессов ![]() и M(t) при разгоне привода от нулевой начальной скорости до рабочей
и M(t) при разгоне привода от нулевой начальной скорости до рабочей ![]()
3.2 Расчет и построение графиков переходных процессов ![]() и M(t) при переводе привода из положения "Подъем" с рабочей скоростью
и M(t) при переводе привода из положения "Подъем" с рабочей скоростью ![]() в положение "Спуск" при опускании пустой крюковой подвески в режиме рекуперативного торможения со скоростью щ>щ0
в положение "Спуск" при опускании пустой крюковой подвески в режиме рекуперативного торможения со скоростью щ>щ0
3.3 Расчет и построение графиков переходных процессов ![]() и M(t) при торможении электропривода в конце подъема груза, определение места
и M(t) при торможении электропривода в конце подъема груза, определение места
установки конечного выключателя, ограничивающего высоту подъема крюковой подвески
4. Разработка принципиальной электрической схемы электропривода
Выводы
Перечень ссылок
РЕФЕРАТ
Объект проектирования: электропривод с двигателем постоянного тока.
Цель работы: выбрать электродвигатель по мощности, рассчитать и построить механические характеристики электропривода в рабочих режимах и электромеханические переходные процессы в электроприводе, разработать принципиальную электрическую схему электропривода.
ЭЛЕКТРОПРИВОД, РАСЧЕТ, МОЩНОСТЬ, СКОРОСТЬ, ХАРАКТЕРИСТИКА, СТРУКТУРА, СХЕМА, ПРОЦЕСС.
Введение
Электроприводом называется электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенных для приведения в движение исполнительных органов рабочей машины и управления этим движением.
Нельзя представить себе ни одного современного производственного механизма, в любой области техники, который не приводился бы в действие электроприводом. В электроприводе основным элементом, непосредственно преобразующим электрическую энергию в механическую, является электродвигатель, который чаще всего управляется при помощи соответствующих преобразовательных и управляющих устройств с целью формирования статических и динамических характеристик электропривода, отвечающих требованиям производственного механизма.
Целью данной курсовой работы является расчет электродвигателя, входящего в состав электропривода механизма подъема мостового крана, а также создание системы управления электроприводом, которая бы обеспечила заданные режимы его работы.
1. Выбор электродвигателя по мощности 1.1 Статическая нагрузочная диаграмма электропривода
Для построения статической нагрузочной диаграммы необходимо найти статические моменты на двигателе, мощности и время на переходах.
Определим время подъема и опускания груза (крюковой подвески):
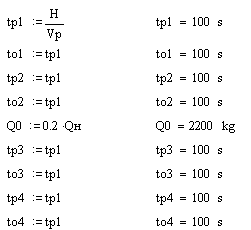
Все необходимые промежутки времени определяются с помощью пакета Mathcad 8
Определим продолжительность цикла:
![]()
Продолжительность включения механизма в статике:
![]()
Определим статические моменты на валу электродвигателя при подъеме и опускании грузов (крюковой подвески):
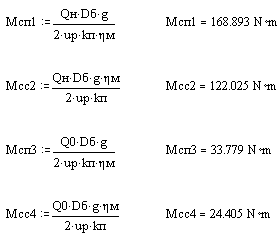
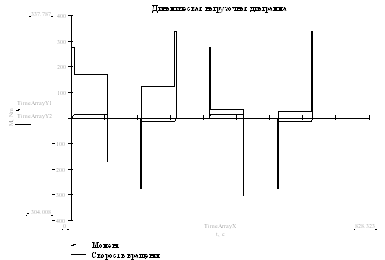
Таким образом, статическая диаграмма будет состоять из следующих участков: подъем груза (tр1), остановка механизма на время (to1), опускание груза (tр2), остановка на время разгрузки (to2), подъем крюковой подвески (tр3), остановка механизма подъема на время перемещения крюковой подвески к месту загрузки (to3), опускание крюковой подвески (tр4), остановка механизма на время загрузки (to4). Диаграмма представлена на рисунке 1.1.
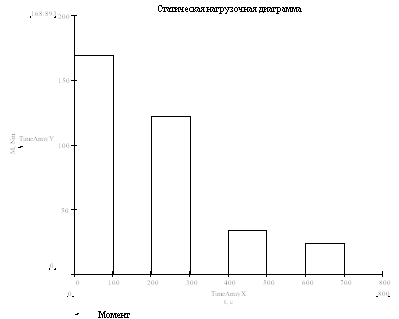
Рисунок 1.1 — Статическая нагрузочная диаграмма
1.2 Предварительный выбор электродвигателя по мощности и скорости
Мощность электродвигателя с ближайшей стандартной продолжительностью включения ПВст выбираем из условия подъема номинального груза по расчетной мощности:
![]()
Т.к. tц>10 мин, то выбирается двигатель со стандартной продолжительностью включения ПВ=100% по условию Рн*100%>=Ррасч
Номинальную частоту вращения двигателя определим из формулы:
![]()
Исходя из условий nн> nр и Рн*100%>=Ррасч выберем электродвигатель постоянного тока 4ПФ160S. Он обладает следующими параметрами:
-мощность 15 кВт;
-ток якоря 79.6 А;
-номинальная частота вращения 850 об/мин;
-максимальная частота 4000 об/мин;
-напряжение якоря 220 В;
-кпд 80.7%.
1.3 Динамическая нагрузочная диаграмма электропривода
Определим динамический пусковой момент по формуле:
![]()
Где М1 и М2 – максимальный и минимальный пусковые моменты соответственно
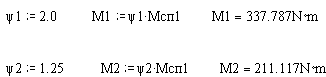
Где ш – кратность пусковых моментов
Определим время подъема и опускания груза , для этого:
![]()
Момент инерции якоря
![]()
Момент инерции муфты с тормозным шкивом
![]()
Суммарный , приведенный момент инерции
![]()
![]()
Угловая скорость вращения вала двигателя
Время пуска привода для каждой операции
Для определения времени электрического торможения механизма подъема найдем суммарный приведенный момент инерции при торможении

![]()
Тормозные моменты
Где Kт – коэффициент запаса торможения.
Время торможения
Уточненное значение продолжительности включения
![]()
Число циклов в час
![]()
Определим эквивалентный момент по данным динамической нагрузочной диаграммы
![]()
![]()
![]()
Эквивалентная мощность, соответствующая моменту эквивалентному
![]()
Т.е. оно выполняется
1.5 Проверочный расчет электродвигателя по условиям пуска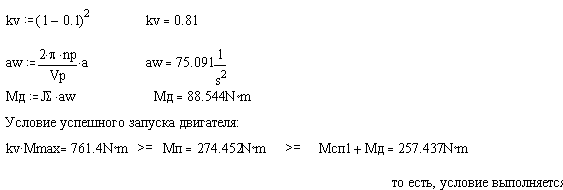 .
.

2 Механические характеристики электропривода в рабочих режимах 2.1 Расчет и построение естественной и рабочей механических характеристик электропривода в двигательном режиме работы, определение величины сопротивления рабочей секции, статизма электропривода
Естественную характеристику электропривода построим по точкам с координатами ![]() и
и ![]() .
.
![]()
Номинальный момент
Необходимые для построения значения скоростей найдем как:
Скорость холостого хода
![]()
где
![]()
![]() - Активное сопротивление обмотки якоря
- Активное сопротивление обмотки якоря
![]()
Рабочую характеристику при рабочей скорости щр<щн строится по координатам щ=щ0, М=0; щ=щр, М=Мс1. Естественная и рабочая характеристики показаны на рисунке 2.1.
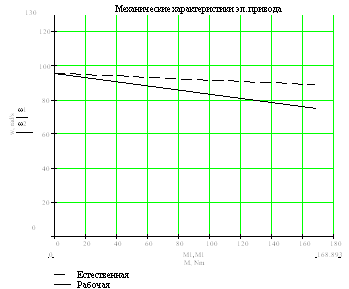
Рисунок 2.1 — Механические характеристики привода
Статизм определим из следующего соотношения:
дщ=(щ0-щн)*100%/щ0 дщ=7,172%
2.2 Определение максимально возможного диапазона регулирования скорости привода при реостатном способе регулирования и регулирования скорости изменением напряженияПри реостатном способе регулирования скорости, скорость меняется при изменении сопротивления якоря. Точность регулирования при этом очень низкая — ![]() Достаточно велики потери электрической энергии на сопротивлении. Диапазон изменения скорости при реостатном регулировании (графически): щ=щреост.min…щн=70.1…89
Достаточно велики потери электрической энергии на сопротивлении. Диапазон изменения скорости при реостатном регулировании (графически): щ=щреост.min…щн=70.1…89
При регулировании скорости изменением напряжения получим следующий диапазон изменения скорости.
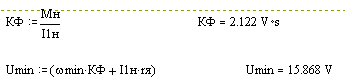
Минимально возможная скорость при регулировании напряжением:
![]()
тогда по построению ![]()
Напряжение, соответствующее минимальной скорости:
Максимально возможная скорость при регулировании напряжением:

Напряжение, соответствующее максимальной скорости:
![]()
Диапазон регулирования скорости: щ=щmin…щmax=0.042…96.25 при изменении напряжения U=Umin…Umax=15.865…220(B)
2.3 Определение необходимого статизма при увеличении диапазона регулирования до указанного в техническом задании с обоснованием способа снижения статизма и приведением необходимой структуры электроприводаОптимальный статизм найдем как ![]()
2.4 Расчет и построение статической пусковой диаграммы электропривода 2.4.1 Определение количества пусковых ступеней и секций, величин их сопротивлений
Построим статическую пусковую диаграмму выхода на естественную характеристику, исходя из следующих соображений: aдоп=0.1(м/сІ), Vр=0.1(м/с)
Для подсчета ускорения воспользуемся формулой: ![]() где
где ![]()
Время разгона двигателя:
![]()
где
![]()
![]()
![]()
Количество пусковых ступеней найдем как 
![]()
Так как выходим на естественную характеристику, то ![]()
![]() больше
больше ![]()
Получены следующие расчетные значения: ![]() количество пусковых ступеней — 1, суммарное время разгона
количество пусковых ступеней — 1, суммарное время разгона ![]() сопротивление первой пусковой ступени
сопротивление первой пусковой ступени
![]()
Сопротивление первой пусковой секции
![]()
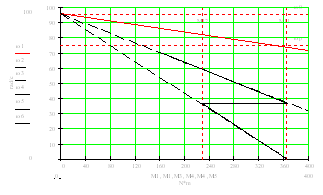
Рисунок 2.2 — Статическая пусковая диаграмма
2.4.2 Определение плавности регулирования скорости при использовании пусковых сопротивлений в качестве регулировочных 2.4.3 Разработка силовой электрической схемы электропривода с учетом технологических условий работы механизма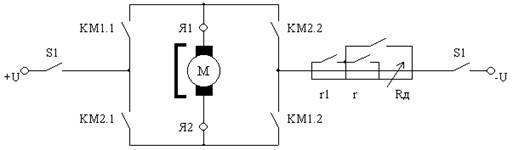
Рисунок 2.5 — Силовая схема электропривода
Силовая схема содержит высокомоментный двигатель постоянного тока, рубильники (S1), реверсивный мост и пусковые ступени с реостатом для регулирования скорости (Rд).
2.5 Расчет и построение механических характеристик электропривода в тормозных режимах 2.5.1 Расчет и построение механической характеристики привода при силовом спуске пустой крюковой подвески в режиме рекуперативного торможения, определение величины сопротивления секции противовключенияДля рекуперативного торможения найдем тормозной момент:
![]()
ЕДС, генерируемая приводом:
![]()
Ток противовключения :
![]()
Сопротивление противовключения:
![]()
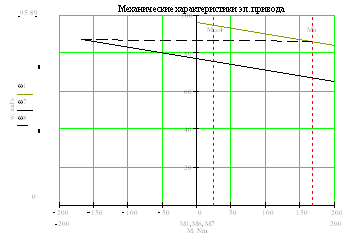
Рисунок2.4-Рекуперативное торможение
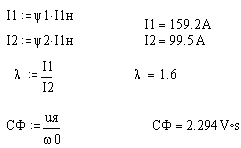
2.5.2 Расчет и построение механической характеристики при реверсе по току якоря, определение величины сопротивления секции противовключенияСопротивление секции противовключения найдем как
![]()
Точки для построения характеристики: ![]() и
и ![]() Точки для построения реверсивной характеристики:
Точки для построения реверсивной характеристики: ![]() и
и ![]()
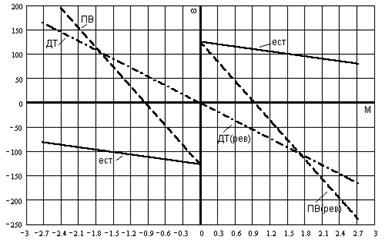
Рисунок 2.6 — Тормозные характеристики
2.6 ВыводыПри рассмотрении работы электродвигателя, приводящего в действие производственный механизм, необходимо, прежде всего, выявить соответствие механических характеристик двигателя характеристике производственного механизма. Поэтому для правильного проектирования и экономичной эксплуатации электропривода необходимо изучать эти характеристики.
3 Электромеханические переходные процессы в электроприводе 3.1 Расчет и построение графиков переходных процессов
Так как процесс разгона двигателя происходит ступенчато (одна ступень), то имеем два переходных процесса. Для построения графиков переходных процессов найдем постоянные времени переходных процессов:
![]()
Тогда время переходных процессов найдем как:
![]()
График переходного процесса по скорости будет комбинацией графиков переходных процессов, происходящих при разгоне до скорости, на которой шунтируется пусковая секция и при разгоне до необходимой скорости: ![]()
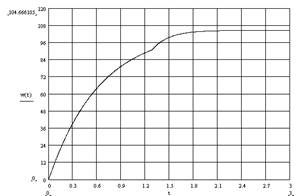
Рисунок 3.1 — Переходный процесс ![]()
График переходного процесса по току будет комбинацией графиков переходных процессов, происходящих при разгоне до скорости, на которой шунтируется пусковая секция и при разгоне до необходимой скорости: ![]()
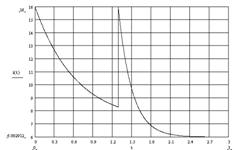
Рисунок 3.2 — Переходный процесс ![]()
Перевод привода из положения «Вперед» в положение «Назад» осуществим поэтапно. Сначала затормозим двигатель противовключением, после чего осуществим его разгон в противоположную сторону до скорости ![]() , а затем — до скорости
, а затем — до скорости ![]() Разгон до каждой из скоростей будем осуществлять ступенчато, как показано в п.2.4, так как конечные скорости пропорциональны.
Разгон до каждой из скоростей будем осуществлять ступенчато, как показано в п.2.4, так как конечные скорости пропорциональны.
Переходный процесс при торможении противовключением.
Постоянная времени переходного процесса:
Время переходного процесса: ![]()
Переходный процесс по скорости будет описываться уравнением
![]()
Переходный процесс по току будет описываться уравнением
![]()
Переходные процессы при разгоне до скорости ![]() .
.
По скорости: ![]()
По току: ![]()
Переходные процессы при разгоне до скорости ![]() .
.
По скорости: ![]()
По току: ![]()
График переходного процесса по скорости получим комбинацией графиков переходных процессов на каждом участке.
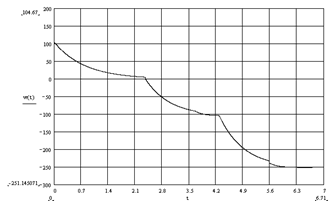
Рисунок 3.3 — Переходный процесс ![]()
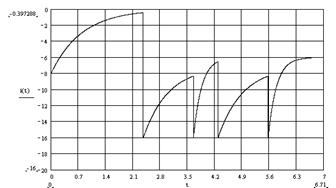
Рисунок 3.4 — Переходный процесс ![]()
Постоянную времени переходных процессов определим как
Время переходного процесса определим ![]()
Переходные процессы по скорости:
![]()
Переходные процессы по току:
![]()
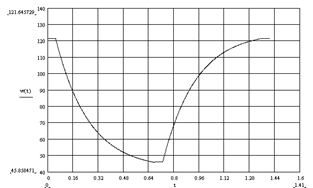
Рисунок 3.5 — Переходный процесс ![]()
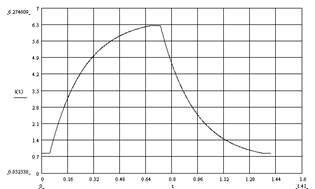
Рисунок 3.6 — Переходный процесс ![]()
Путь при переходном процессе найдем из следующих соотношений:
![]() где
где ![]() — число оборотов рабочего органа.
— число оборотов рабочего органа.
![]() где
где ![]() — число оборотов двигателя.
— число оборотов двигателя.
![]() где
где ![]() — угол поворота ротора двигателя за время переходного процесса.
— угол поворота ротора двигателя за время переходного процесса.
![]()
Тогда ![]()
Следовательно, ![]()
Похожие работы
... : Где k=1,2 –коэффициент, учитывающий момент инерции механической передачи от электродвигателя к рабочей машине; JДВ –момент инерции электродвигателя; Jм –момент инерции рабочей машины. Используя построенные механические характеристики электродвигателя Мдв =f1 (ω) и рабочей машины Мс =f2 (ω), находим их разность –кривая избыточного (динамического) момента: Мизб = Мдв – Мс = f3 ...
... д. Асинхронные двигатели также применяются в промышленности, например, для приводов крановых установок общепромышленного назначения, а также различных грузовых лебедок и других устройств, необходимых в производстве. Можно сказать, что электродвигатели переменного тока имеют огромное значение для большинства видов промышленности. Глава 2 Основные сведения о ...
... . t, с U, °С 0 0 500 36,5 1000 54 1500 62,3 2000 66,4 2500 68,2 3000 69,2 3600 69,7 2. Проектирование передаточного устройства 2.1 Выбор и обоснование кинематической схемы Согласно технологической схеме рабочей машины, транспортер приводится в движение электродвигателем через цепную передачу. Цепная передача отличается простотой в монтаже и эксплуатации, исключает ...
... 103,9 111,12 117,71 121,16 125,93 129,64 232,3 131,2 -96,6 Строим механические характеристики и . Задание 2. Определить время разбега системы до номинальной скорости вращения tp и построить кривую разбега. Решение. Время разбега системы определяем на основе уравнения движения электропривода: , . - динамический момент системы, ; -приведенный момент инерции движущихся частей ...
0 комментариев