Навигация
3.4 Выводы
Изучение переходных режимов электропривода имеет большое практическое значение. Результаты их расчетов позволяют правильно определить мощность электродвигателей и аппаратуры, рассчитать систему управления и оценить влияние работы электропривода на производительность и качество работы производственных механизмов.
4 Разработка принципиальной электрической схемы электропривода
Согласно заданию на проектирование, разрабатываем электрическую схему электропривода с использованием бесконтактных элементов.
Силовая часть схемы включает в себя цепи пуска высокомоментного ДПТ в функции ЭДС, его реверса, торможения противовключением и динамического торможения в функции тока.
В работе электропривода можно выделить следующие логические функции и условия, согласно которым осуществляется работа привода.
Логические функции.
![]() — если «1», то двигатель работает в режиме «вперед»;
— если «1», то двигатель работает в режиме «вперед»;
![]() — если «1», то двигатель работает в режиме «назад»;
— если «1», то двигатель работает в режиме «назад»;
![]() — если «0», то включается первая рабочая скорость;
— если «0», то включается первая рабочая скорость;
![]() — если «0», то включается вторая рабочая скорость;
— если «0», то включается вторая рабочая скорость;
![]() — если «1», то двигатель работает в режиме динамического торможения;
— если «1», то двигатель работает в режиме динамического торможения;
![]() — если «1», то осуществлен пуск двигателя в функции ЭДС;
— если «1», то осуществлен пуск двигателя в функции ЭДС;
![]() — если «0», то двигатель работает в режиме торможения противовключением.
— если «0», то двигатель работает в режиме торможения противовключением.
Логические условия.
![]() — если «1», то нажата кнопка SB1 («стоп»), иначе — кнопка SB1 отпущена;
— если «1», то нажата кнопка SB1 («стоп»), иначе — кнопка SB1 отпущена;
![]() — если «1», то нажата кнопка SB2 («пуск вперед»), иначе — кнопка SB2 отпущена;
— если «1», то нажата кнопка SB2 («пуск вперед»), иначе — кнопка SB2 отпущена;
![]() — если «1», то нажата кнопка SB3 («пуск назад»), иначе — кнопка SB3 отпущена;
— если «1», то нажата кнопка SB3 («пуск назад»), иначе — кнопка SB3 отпущена;
![]() — если «1», то нажата кнопка SB4 («включение первой рабочей скорости»), иначе — кнопка SB4 отпущена;
— если «1», то нажата кнопка SB4 («включение первой рабочей скорости»), иначе — кнопка SB4 отпущена;
![]() — если «1», то нажата кнопка SB5 («возврат на номинальную скорость»), иначе — кнопка SB4 отпущена;
— если «1», то нажата кнопка SB5 («возврат на номинальную скорость»), иначе — кнопка SB4 отпущена;
![]() — если «1», то нажата кнопка SB6 («включение второй рабочей скорости»), иначе — кнопка SB6 отпущена;
— если «1», то нажата кнопка SB6 («включение второй рабочей скорости»), иначе — кнопка SB6 отпущена;
![]() — если «1», то нажата кнопка SB7 («возврат на первую рабочую скорость»), иначе — кнопка SB7 отпущена;
— если «1», то нажата кнопка SB7 («возврат на первую рабочую скорость»), иначе — кнопка SB7 отпущена;
![]() ,
, ![]() — если «1», то в цепи якоря короткое замыкание, иначе — номинальный режим;
— если «1», то в цепи якоря короткое замыкание, иначе — номинальный режим;
![]() — если «1», то в цепи якоря перегрузка по току, иначе — номинальный режим;
— если «1», то в цепи якоря перегрузка по току, иначе — номинальный режим;
![]() — если «1», то в цепи якоря есть ток, иначе — тока нет;
— если «1», то в цепи якоря есть ток, иначе — тока нет;
![]() — если «1», то в напряжение на якоре достигло порогового значения, при котором необходимо отключить пусковое сопротивление, иначе — напряжение меньше необходимого;
— если «1», то в напряжение на якоре достигло порогового значения, при котором необходимо отключить пусковое сопротивление, иначе — напряжение меньше необходимого;
![]() — если «1», то необходимо включить секцию противовключения для предотвращения броска тока, иначе такой необходимости нет;
— если «1», то необходимо включить секцию противовключения для предотвращения броска тока, иначе такой необходимости нет;
![]() — если «1», то закончилась временная выдержка, в течение которой МТЗ может считаться не сработавшей, иначе — МТЗ сработала.
— если «1», то закончилась временная выдержка, в течение которой МТЗ может считаться не сработавшей, иначе — МТЗ сработала.
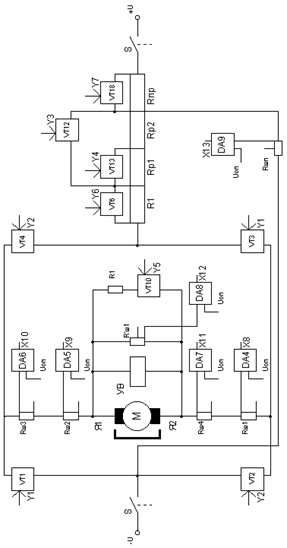
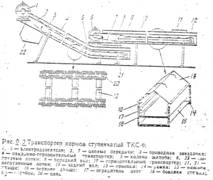
Рисунок 4.1 — Функциональная схема силовой части привода
Работа схемы.
Силовая схема электропривода состоит из высокомоментного ДПТ (М), реверсивного транзисторного мостового коммутатора (VT1..VT4), бесконтактных переключателей (VT6, VT10, VT12, VT13 и VT18), бесконтактных датчиков тока (Rш1..Rш4) и напряжения (R’ш1 и Rшп), а также компараторов тока и напряжения (DA4..DA9).
Исходное состояние — двигатель выключен.
Для пуска двигателя вперед, необходимо нажать кнопку SB2. При этом если не нажата кнопка «стоп» (SB1), есть напряжение на блоке питания схемы, не сработали реле короткого замыкания (Rш1 и Rш2) и не сработала максимальная токовая защита (Rш3) и временная задержка для того, чтобы схема не отключилась при кратковременном набросе тока, то двигатель начинает работать в режиме «вперед». Таким образом, можно записать следующее выражение: ![]()
Для пуска двигателя назад, необходимо нажать кнопку SB3. При этом если не нажата кнопка «стоп» (SB1), есть напряжение на блоке питания схемы, не сработали реле короткого замыкания (Rш1 и Rш2) и не сработала максимальная токовая защита (Rш3) и временная задержка для того, чтобы схема не отключилась при кратковременном набросе тока, то двигатель начинает работать в режиме «назад». Таким образом, можно записать следующее выражение: ![]()
Пуск в функции ЭДС осуществляется автоматически при включении двигателя вперед или назад и достижении напряжением якоря порогового значения, а так же при условии того, что в данный момент не производится торможение противовключением. Таким образом, можно записать следующее выражение: ![]()
Включение первой рабочей скорости (выключение переключателя VT12, поэтому ![]() для включения скорости) осуществляется, если нажата кнопка SB4 и не нажата кнопка SB5, и закончился пуск в функции ЭДС. Выражение для включения первой рабочей скорости:
для включения скорости) осуществляется, если нажата кнопка SB4 и не нажата кнопка SB5, и закончился пуск в функции ЭДС. Выражение для включения первой рабочей скорости: ![]() Для реализации этой функции применим триггер RS-типа.
Для реализации этой функции применим триггер RS-типа.
Включение второй рабочей скорости (выключение переключателя VT13, поэтому ![]() для включения скорости) осуществляется, если нажата кнопка SB6 и не нажата кнопка SB5, и включена первая скорость. Выражение для включения второй рабочей скорости:
для включения скорости) осуществляется, если нажата кнопка SB6 и не нажата кнопка SB5, и включена первая скорость. Выражение для включения второй рабочей скорости: ![]() Для реализации этой функции применим триггер RS-типа.
Для реализации этой функции применим триггер RS-типа.
Динамическое торможение привода осуществляется, если нажата кнопка «стоп» (SB1), в цепи якоря протекает ток (Rш4) и не производится торможение противовключением. Выражение для включения цепи динамического торможения имеет вид: ![]()
Торможение противовключением осуществляется, если произошла смена направления движения (последовательно были нажаты кнопки «стоп» и «пуск» в одном из направлений) и сработало бесконтактное реле напряжения Rшп. Выражение для запуска торможения противовключением будет иметь вид: ![]()
Бесконтактные переключатели (VT1..VT4, VT6, VT10, VT12, VT13 и VT18) реализованы на транзисторах, работающих в ключевом режиме. Компараторы (DA4..DA9) реализованы на базе операционных усилителей, работающих в компараторном режиме, типа 140УД12.
В реализации схемы управления используется 4 элемента И (2 двух-, 1 трех- и 1 четырехвходовый), 3 элемента И-НЕ (2 двух- и 1 трехвходовый), 3 двухвходовых элемента ИЛИ, 1 элемент ИЛИ-НЕ и 4 асинхронных RS-триггера, а также, для получения сигнала ![]() (временная задержка сигнала
(временная задержка сигнала ![]() ), — RC-цепочка.
), — RC-цепочка.
Для реализации логики используем микросхемы серии К155.
Выводы
Управление электроприводами заключается в осуществлении пуска, регулировании скорости, торможения, реверсирования, а также поддержания режима работы привода в соответствии с требованиями технологического процесса.
В простейших случаях пуск, регулирование скорости и торможение осуществляется при помощи аппаратов ручного управления. Применение этих аппаратов связано с дополнительной затратой времени на управление и, следовательно, снижает производительность механизма. Кроме того, применение аппаратов ручного управления исключает возможность дистанционного управления, что неприемлимо в ряде современных автоматизированных установок.
Стремление устранить подобные недостатки ручного управления привело к созданию аппаратов полуавтоматического и автоматического управления.
Автоматическое управление электроприводами является одним из основных условий повышения производительности механизмов и производства продукции высокого качества.
Кроме того, автоматизация упрощает обслуживание механизмов, дает возможность осуществить дистанционное управление электроприводами. Последнее особенно важно там, где нельзя управлять двигателями в непосредственной близости по условиям территориального расположения машин или в связи с особенностями технологического процесса.
Перечень ссылок
1. Чиликин М.Г., Сандлер А.С. Общий курс электропривода: учебник для вузов. — 8-е изд., доп. И перераб. — М.:Энергоиздат, 2004. — 576 с., ил.
2. Забродин Ю.С. Промышленность электроника: учебник для вузов. — М.:Высш.школа, 2002. — 496 с., ил.
3. Руденко В.С. Приборы и устройства промышленной электроники. — К.:Техника, 2005. — 368 с.
4. Лебедев А.М и др. Следящие электроприводы станков с ЧПУ. — М.:Энергоатомиздат, 2003. — 223 с., ил.
5. Панкратов А.И. Методические указания к самостоятельной работе по дисциплине «Электрооборудование подъемно-транспортных машин» (для студентов спецальности 15.04). —:КИИ, 2005. — 35 с.
6. Панкратов А.И. Методические указания к самостоятельной работе по дисциплине «Электротехника, основы электроники и электрооборудование» (для студентов специальностей 12.01, 12.02, 11.06, 12.03, 12.05, 11.08). —:КИИ, 2004. — 27 с.
7. Панкратов А.И. Методические указания к самостоятельной работе по дисциплине «Автоматика и автоматизация производственных процессов» (для студентов спецальности 15.04). —:КИИ, 2006. — 16 с.
Похожие работы
... : Где k=1,2 –коэффициент, учитывающий момент инерции механической передачи от электродвигателя к рабочей машине; JДВ –момент инерции электродвигателя; Jм –момент инерции рабочей машины. Используя построенные механические характеристики электродвигателя Мдв =f1 (ω) и рабочей машины Мс =f2 (ω), находим их разность –кривая избыточного (динамического) момента: Мизб = Мдв – Мс = f3 ...
... д. Асинхронные двигатели также применяются в промышленности, например, для приводов крановых установок общепромышленного назначения, а также различных грузовых лебедок и других устройств, необходимых в производстве. Можно сказать, что электродвигатели переменного тока имеют огромное значение для большинства видов промышленности. Глава 2 Основные сведения о ...
... . t, с U, °С 0 0 500 36,5 1000 54 1500 62,3 2000 66,4 2500 68,2 3000 69,2 3600 69,7 2. Проектирование передаточного устройства 2.1 Выбор и обоснование кинематической схемы Согласно технологической схеме рабочей машины, транспортер приводится в движение электродвигателем через цепную передачу. Цепная передача отличается простотой в монтаже и эксплуатации, исключает ...
... 103,9 111,12 117,71 121,16 125,93 129,64 232,3 131,2 -96,6 Строим механические характеристики и . Задание 2. Определить время разбега системы до номинальной скорости вращения tp и построить кривую разбега. Решение. Время разбега системы определяем на основе уравнения движения электропривода: , . - динамический момент системы, ; -приведенный момент инерции движущихся частей ...
0 комментариев