Навигация
Построение кинематической схемы и траекторий рабочих точек механизмов иглы и нитепритягивателя
25865
знаков
6
таблиц
7
изображений
1 Построение кинематической схемы и траекторий рабочих точек механизмов иглы и нитепритягивателя
Под кинематической схемой понимают изображение механизма, машины или установки, на котором должна быть представлена вся совокупность кинематических элементов и их соединений, предназначенных для осуществления регулирования, управления и контроля заданных движений исполнительных органов.
|
|
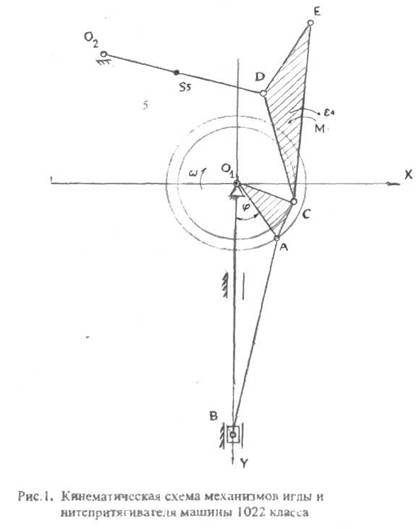
Кинематическая схема может быть плоской или пространственной (в ортогональном или аксонометрическом изображении). На рис. I представлена плоская кинематическая схема механизмов иглы и нитепритягивателя универсальной швейной машины 1022 класса. На рис. 2 - пространственная конструктивно-кинематическая схема.
Машина 1022 класса предназначена для стачивания деталей швейных изделий из хлопчатобумажных и шерстяных тканей однолинейной двухниточной строчкой челночного переплетения. Основными рабочими механизмами машины являются: кривошипно-шатунный механизм иглы, ротационный механизм челнока, шарнирно-стержневой механизм нитепритягивателя, простой механизм транспортирования материалов, узел лапки. В машине осуществляется централизованная смазка.
В курсовом проекте в соответствии с полученными данными необходимо построить кинематическую схему механизмов иглы и нитепритягивателя. Кинематические схемы выполняют в масштабе, который рассчитывается по формуле:
Kl = ![]() (1)
(1)
L – действительные размеры кинематического звена, м;
l – размер этого звена на кинематической схеме, мм.
Kl = 0,014/56=1/4000=0,00025(м/мм)
| Частота вращения главного вала, n, мин-1 | Звено О1А, мм | Звено О1С, мм | Звено АС, мм | Звено АВ, мм | Звено О2D, мм | Звено О2Х, мм | Звено О2Y, мм | Звено СD, мм | Звено DE, мм | Звено CE, мм |
| 5200 | 14 | 12 | 9 | 35 | 24 | 18 | 26 | 24 | 31 | 51 |
Таблица 1: исходные данные для построения кинематической схемы механизмов иглы и нитепритягивателя
Кинематическую схему механизма строят в следующем порядке. Вначале по заданным координатам x и y точек О1 и О2 (табл.1) в выбранном масштабе длин Кl, мм/мм, м/мм, (табл.2) наносят положение неподвижных точек О1 и О2 и проводят осьО1В неподвижной направляющей игловодителя, совпадающей с линией его движения. Затем из центра О1 радиусами
![]() О1 А =
О1 А =![]() и О1 С =
и О1 С =![]() мм проводят окружности - траектории точек А и С.
мм проводят окружности - траектории точек А и С.
Далее траектории этих точек разбивают на двенадцать равных частей (в точках (1,2,3,..,12 и 1',2',3'...,12'). Построение схемы механизмов в указанных 12 положениях выполняют с использованием метода засечек.
Кинематическая схема и разметка траекторий рабочих точек звеньев механизмов иглы и нитепритягивателя представлены в приложении.
Таблица 2: расчетные данные для построения кинематической схемы механизмов иглы и нитепритягивателя
| Масштаб длин, Kl , м/мм | Звено О1А, мм | Звено О1С, мм | Звено АС, мм | Звено АВ, мм | Звено О2D, мм | Звено О2Х, мм | Звено О2Y, мм | Звено СD, мм | Звено DE, мм | Звено CE, мм |
| 0,00025 | 56 | 48 | 36 | 140 | 96 | 72 | 104 | 96 | 124 | 204 |
Основой для кинематического анализа является кинематическая схема рис.2
Перемещение точки В игловодителя определяется из рассмотрения различных положений кривошипно-шатунного механизма. Палец кривошипа, т.е. шарнир А1 из крайнего верхнего положения А0 проворачивается на угол φ. При этом игловодитель перемещается на величину Sв. Опустив из точки А перпендикуляр А1С на линию движения игловодителя О1В1 получим:
Sв = О1В1 – О1 В0 = (СВ1 - О1В1)-(А0В0 - А0О1) (2)
т.к. О1А1 = r , а А1В1 = l , тогда получим
Sв = (l.cosβ – r.cosφ) - (l - r) = r.(1 – cosφ) – l.(1 – cosβ) (3)
В полученное выражение φ и β – переменные величины
Рассмотрим ∆ СА1О1 и ∆ СА1В1 и выразим значение углов
СА1 = r.sinφ
СА1 = l.sinβ , тогда
sinβ = r/l. Sinφ (4)
| |
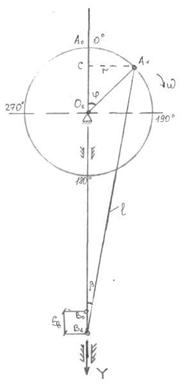
Рисунок 2.
Разложим cosβ в степенной ряд, получим
cosβ = 1 - ![]() +
+ ![]() +...... (5)
+...... (5)
влияние 3 и 4 ..... множителей не имеет значения, ими можно пренебречь, тогда получим выражение и подставим его в формулу (2), получим
Sв = r.(1 – cosφ) –![]() (6)
(6)
Дифференцируя это выражение по времени можно получить уравнение скорости и ускорения:
S’в = υВ = ![]() = ω.r.(sinφ +
= ω.r.(sinφ + ![]() )
(7)
)
(7)
S’’в =аВ = ![]() = ω2.r.( scosφ +
= ω2.r.( scosφ + ![]() ) (8)
) (8)
График перемещения точки В
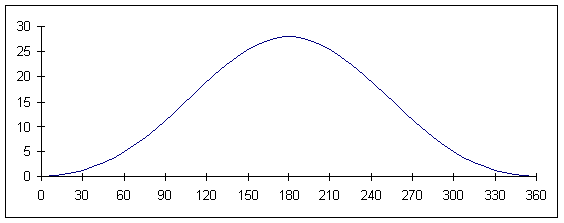
График скорости точки В
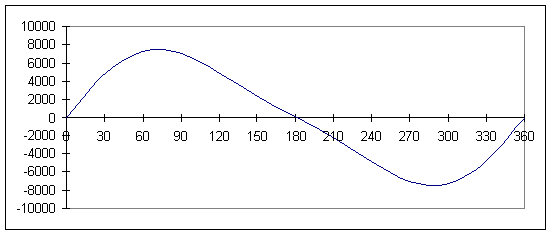
График ускорения точки В
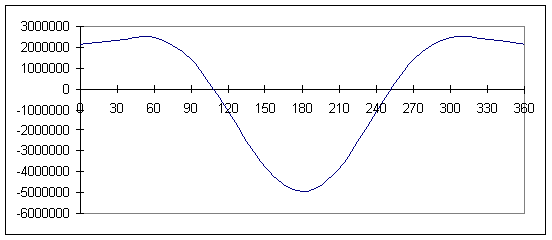
Рисунок 3
Похожие работы
... механизма для обеспечения эффективного перехода на различные способы транспортирования в зависимости от свойств материала и выполняемой технологической операции. Разработке методов кинематического анализа механизмов транспортирования ткани швейных машин и соответствующего этой задаче алгоритмического и программного обеспечения посвящены работы. [67],[71],[72]. В работе Ю.Ю.Щербаня и В.А.Горобца ...
0 комментариев