Навигация
Разработка системы непрерывного управления скоростью асинхронного двигателя с фазным ротором с помощью импульсно-ключевого регулятора добавочного сопротивления роторной цепи
18434
знака
6
таблиц
27
изображений
Введение
Современный электропривод состоит из большого числа разнообразных деталей, машин и аппаратов, выполняющих различные функции. Все они в совокупности совершают работу, направленную на обеспечение определенного производственного процесса. Наиболее важным элементом является система управления электроприводом (СУЭП). От правильного функционирования системы управления зависит состояние объекта управления и правильности отработки заданных параметров.
В настоящее время СУЭП решает несколько важных задач:
Формирование статических механических характеристик электропривода с целью стабилизации скорости (или момента), расширение диапазона регулирования скорости, ограничение перегрузок, формирование адаптивных систем.
Оптимизация переходных режимов с целью повышения быстродействия, снижения динамической ошибки, ограничение ускорения, рывков и т.д.
Целью данного курсового проекта является разработка системы непрерывного управления скоростью асинхронного двигателя с фазным ротором с помощью импульсно-ключевого регулятора добавочного сопротивления роторной цепи.
Также необходимо разработать принципиальную схему, с выбором ее элементов, и предложить вариант реализации блока управления.
1. Определение структуры и параметров объекта управления
В задании на курсовой проект в качестве исполнительного двигателя используется асинхронный двигатель с фазным ротором типа МТН112-6. Данный двигатель наиболее часто применяется в краново-металлургическом производстве. Приведем паспортные данные для двигателя:
Номинальная мощность P2н=15 кВт;
Номинальное напряжение статора (питания) Uн=380 В;
Номинальное напряжение ротора U2ф=219 В;
Номинальная частота вращения nном=955 об/мин;
Критический момент Ммах=380 Нм;
Номинальный ток статора I1н=38 А;
Номинальный ток ротора I2н=46 А;
Коэффициент мощности cosj=0.73;
Коэффициент полезного действия h=82%;
Момент инерции ротора Jp=0.313 кгм2;
Класс нагревостойкости - Н;
Степень защиты IP44.
Определим необходимые параметры двигателя:
Номинальная скорость двигателя:
![]()
Скорость холостого хода:
![]()
Номинальный момент двигателя:
![]()
Номинальное скольжение двигателя:
![]()
Критическое скольжение двигателя:
![]()
Отношения сопротивлений:

Сопротивление статора:
 Ом
Ом
Приведенное сопротивление ротора:
![]() Ом
Ом
Индуктивное сопротивление короткого замыкания:
![]() Ом
Ом
Так как Xk=X1+X2’, причем X1»X2’ примем: X1=0.68 Ом, X2’=0.7 Ом.
Рассчитаем коэффициент приведения сопротивления Кr:
Определяем сопротивления ротора:
![]() Ом
Ом
![]() О
О
Исходя из задания, силовой канал представляем следующим образом (рис.1):
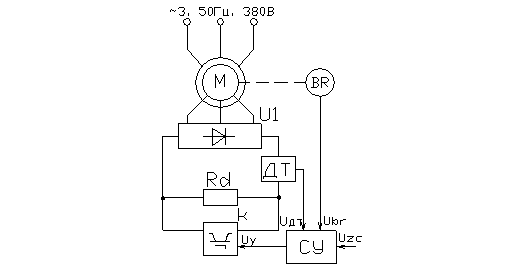
рис.1. На представленной схеме: М – асинхронный двигатель с фазным ротором; BR – тахогенератор; U1 – трехфазный мостовой выпрямитель, включенный в цепь ротора; ДТ – датчик тока; Rd – добавочное сопротивление, шунтированное ключом с частотой коммутации fk=3кГц; К – коммутатор; СУ – система управления.
Дополнительный резистор Rd включен в цепь ротора через неуправляемый выпрямитель U1. Коммутатор (ключ) К периодически закорачивает сопротивление Rd, причем скважность g= tвкл/Тком может изменяться внешним сигналом Uzc в пределах от 0 до 1. При g=0 т.е. при не включенном коммутаторе, сопротивление роторной цепи составит Rr+Rd, что определит механическую характеристику 2 (рис.2). При g=1 (ключ включен постоянно) Rd=0 и двигатель работает на характеристике 1, близкой к естественной (рис.2). Плавное изменение величины скважности в пределах 0< g<1 обеспечивает семейство характеристик, расположенные между характеристиками 1 и 2. Величина g в данном случае зависит от величины тока и скорости. Импульсно-ключевой способ управления АД имеет ряд преимуществ: Высокое быстродействие; Переход с характеристики на характеристику при переходных процессах плавный, без скачков тока и момента, что повышает надежность системы.
Наряду с этими достоинствами данный способ имеет очень существенный недостаток: Регулирование скорости осуществляется путем повышения скольжения, что приводит к увеличению потерь. Поэтому ИКР следует применять только в старых электроприводах в качестве их модернизации, и то только тогда, когда двигатель работает на низких скоростях непродолжительное время.
0 комментариев