Навигация
Расчет характеристик асинхронного двигателя
18434
знака
6
таблиц
27
изображений
2. Расчет характеристик асинхронного двигателя
По уточненной формуле Клосса рассчитываем значения момента и скорости:
Результаты вычислений сведены в таблицу 1.
Тб.1
| S | 1 | 0.9 | 0.8 | 0.6 | 0.5 | 0.4 | 0.3 | 0.285 | 0.25 | 0.2 |
| W рад/с | 0 | 10.5 | 20.9 | 41.9 | 52.4 | 62.8 | 73.3 | 73.4 | 78.5 | 83.8 |
| M Нм | 259 | 282.4 | 308.8 | 375.1 | 414.6 | 453.8 | 478.2 | 480 | 477.6 | 450.1 |
| S | 0.1 | 0.09 | 0.05 | 0.045 | 0 |
| W рад/с | 94.2 | 95.3 | 99.5 | 100 | 104.7 |
| M Нм | 301.2 | 276.5 | 156.5 | 159 | 0 |
Естественная характеристика представлена на рис.2
Определим рабочую область электропривода:
Скорость: Wo(0.05…0.5)=5.235¸52.35 рад/с;
Момент: Мн(0.2…1)=30¸150 рад/с;
На рис.2 эта область выделена штриховкой. В режиме ИКР двигатель работает на семействе характеристик с постоянно меняющейся жесткостью (из-за постоянного изменения сопротивления Rd ). Максимальное значение сопротивления соответствует точке А, рассчитываем его величину по формуле:
 ,
,
где: S’k – критическое скольжение на характеристике 2;
S’н – номинальное скольжение на этой характеристике;
Мн – момент нагрузки (для точки А равен 30 Нм).
Находим номинальное скольжение S’н= 0.95
С помощью программного пакета MATHCAD находим значение критического скольжения на характеристике 2: S’k=7.27 , тогда:
R2’max= S’k*Xk=7.27*1.38=10.03 Ом;
R2’д=R2’maх-R2’=10.03-0.4=9.63 Ом;
R2д= R2’д/Kr=9.63/1.21=7.96 Ом.
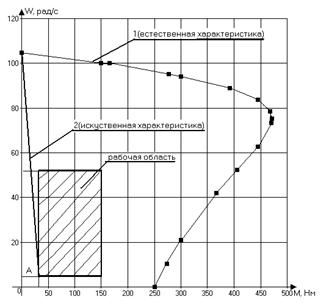
Рис.2
Приведем эквивалентную схему замещения объекта управления относительно выпрямленного тока Id:
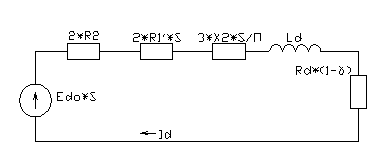
![]() - скважность;
- скважность;
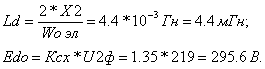 , где:
, где:
Kcx – коэффициент схемы, принимаем равным 1.35
0 комментариев