Навигация
Разработка принципиальной схемы и выбор ее элементов
18434
знака
6
таблиц
27
изображений
5. Разработка принципиальной схемы и выбор ее элементов
Выбор элементов эталонной модели.
Представим схемную реализацию эталонной модели:

рис.5
Выбираем прецизионные операционные усилители DA1 и DA2 серии КР140УД25А. Параметры ОУ: Uпит=±15 В, Iпотр=5 мА, напряжение смещения Uсм=0.03 мВ.
Примем емкость С1 и С2 – по 0.5мкФ
Выбираем конденсаторы К71-7-0.5мкФ±0.5%
Исходя из того, что Тm=0.002 с, рассчитаем величины сопротивлений R1, R2, R3
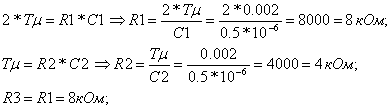
Выбираем:
R1,R3 – C2-29B-0.25-8.06 кОм±0.5%
R2 - C2-29B-0.25-4.02 кОм±0.5%
С3-С6 – блокировочные конденсаторы (для предотвращения обратной связи по питанию) серии К10-17-25В-0.1мкФ±0.5%
Для исключения интегрирования собственной ошибки ОУ необходимо в начальный момент времени закоротить ключ, роль которого выполняет микросхема КР590КН2 в состав которой входит четыре аналоговых ключа, Uпит=±15 В.
Реализация регулятора скорости:

рис.6
Выбираем R1 – 10 кОм, тогда для реализации Крс=10:
![]()
Для создания обратной связи по скорости первой массы применим тахогенератор ТП50-100-1 с параметрами Uмах=150 В Þ в нашем случае примем, что на максимальной скорости тахогенератор вырабатывает 75 В. Jp=360*10-7 кгм2, Мтр=270*10-4 Нм. Видно, что момент инерции ротора тахогенератора и дополнительный момент сопротивления настолько малы по сравнению с основными параметрами системы, что ими можно пренебречь.
![]()
Для согласования выходного напряжения тахогенератора с системой управления, применим делитель, представленный на рис.7
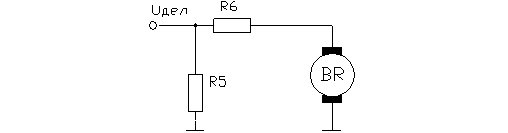
рис.7
Примем R5=10 кОм Þ
![]()
![]()
Итак:
R1, R5 – C2-29B-0.25-10кОм±0.5%
R2 – C2-29B-0.25-13кОм±0.5%
R4 – C2-29B-0.5-100кОм±0.5%
R6 – два параллельно соединенных C2-29B-0.5-130кОм±0.5%
С1, С2 – блокировочные конденсаторы (см. выше)
DA1 – КР140УД25А.
Реализация сумматора (с коэффициентом усиления Кку=30).
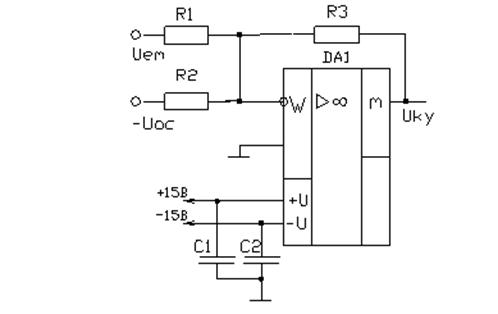
рис.8
Выбираем R1=10 кОм Þ
![]()
R1 – C2-29B-0.25-10кОм±0.5%
R2 – C2-29B-0.5-100кОм±0.5%
R6 – C2-29B-1-300кОм±0.5%
DA1 – КР140УД25А.
Реализация сумматора с ограничением сигнала.
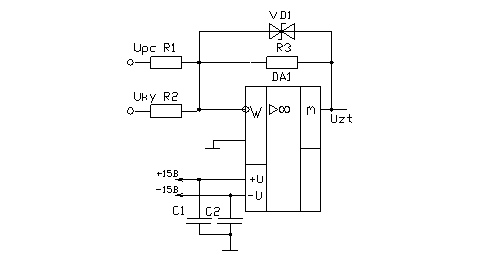
рис.9
Выбираем: R1, R2, R3 – C2-29B-0.25-10кОм±0.5%
Для ограничения используется стабилитрон 2С210A с параметрами:
Uст=10 В, Iст=5 мА, DUст=9-10.5 В.
DA1 – КР140УД25А.
Реализация регулятора тока.
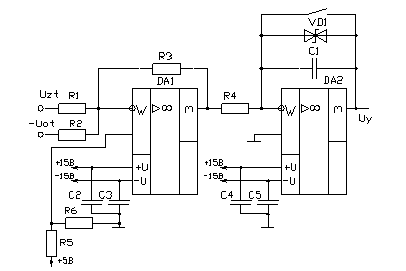
рис.10
Для получения сигнала обратной связи по току применим датчик тока на основе элемента Холла: LTS25-NP с параметрами: Iном=25 А, Iмах=75 А, Uпит=5 В, точность-0.7% от Iном.
Реализовывать И-регулятор тока будем с помощью двух микросхем КР140УД25А
Один операционный усилитель служит для суммирования сигнала задания на ток и сигнала обратной связи, второй будем использовать как интегратор сигнала, поступающего с сумматора, предусмотрев ограничение с помощью стабилитрона 2С210А. В качестве закорачивания интегратора применим второй ключ микросхемы КР590КН2.
Для смещения сигнала от датчика тока подадим на первый ОУ Uсм =2.5 В, используя делитель R5-R6 (по 10 кОм)
Выбираем R1=R3=10 кОм, тогда:
![]()
Выбираем конденсатор С1 - К71-7-0.5мкФ±0.5% Þ
Т.к. Тpt=0.073, то:
![]()
Получили:
R1, R3 – C2-29B-0.25-10кОм±0.5%
R2 – C2-29B-0.25-2кОм±0.5%
R4 –два параллельно соединенных C2-29B-1-291кОм±0.5%
DA1, DA2 – КР140УД25А.
С1 - К71-7-0.5мкФ±0.5%
Теперь объединим отдельно рассмотренные блоки в общую схему. Суммарная принципиальная электрическая схема представлена на листе КП.000.019.002 ЭЗ
0 комментариев