Навигация
Расчёт параметров элементов структурной схемы
8849
знаков
6
таблиц
13
изображений
2. Расчёт параметров элементов структурной схемы
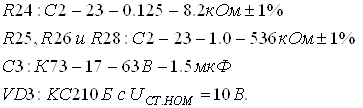
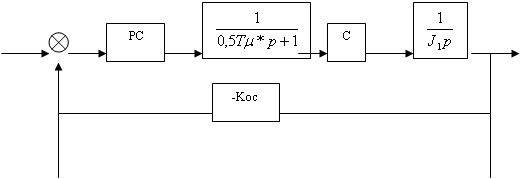
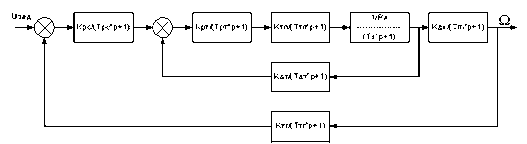
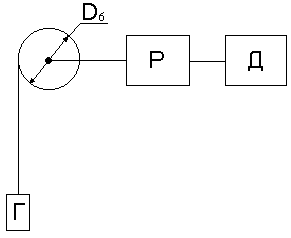
В качестве исходной структурной схемы выберем двухконтурную систему ЭП (рис.1).
Будем настраивать на технический оптимум контур тока и скорости
Контур тока.
![]() Ом
Ом
следовательно, требуется ПИ-регулятор тока.
Контур скорости.
![]() Ом
Ом
следовательно, требуется ПИ-регулятор тока возбуждения.
| |
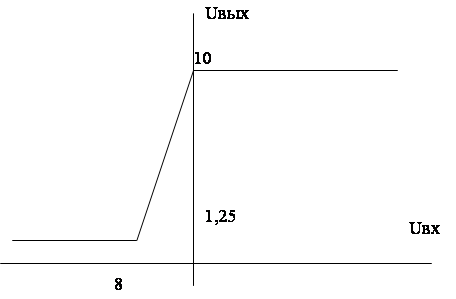
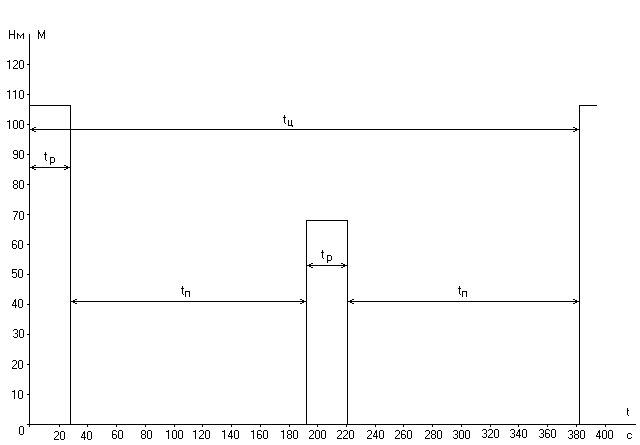
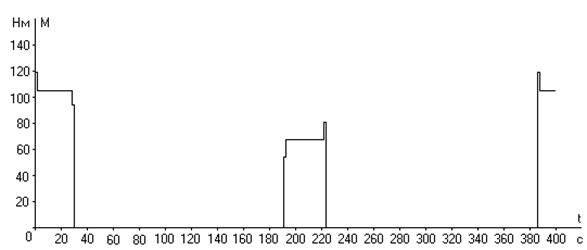
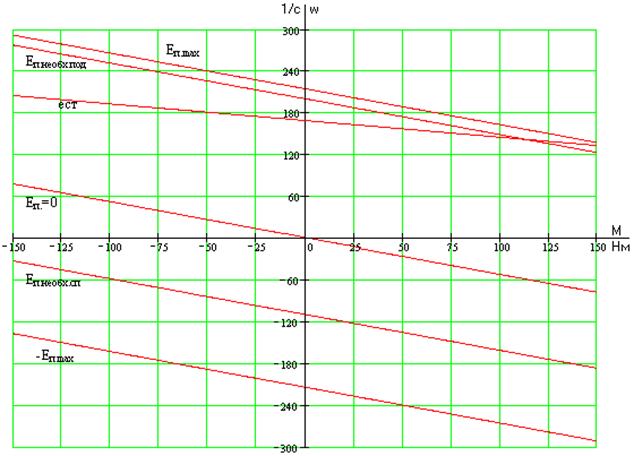
Рис.2. Характеристика задающего звена.
На вход звена, изображённого на рис. 2 приходит сигнал рассогласования (Uze-Eя).
При ![]()
![]() , (Uze-Eя)>0 и на выходе нелинейного элемента идёт задание на номинальный ток возбуждения. При
, (Uze-Eя)>0 и на выходе нелинейного элемента идёт задание на номинальный ток возбуждения. При ![]() , (Uze-Eя)<0 и Uztv уменьшается в зависимости от Eя. Так как ток возбуждения уменьшается, то и магнитный поток обмотки возбуждения уменьшается, а следовательно скорость увеличивается.
, (Uze-Eя)<0 и Uztv уменьшается в зависимости от Eя. Так как ток возбуждения уменьшается, то и магнитный поток обмотки возбуждения уменьшается, а следовательно скорость увеличивается.
Выбор элементов контура тока якоря.
В качестве датчика тока якоря выбираем ДТХ–50. На вход этого датчика можно подавать ![]() . При этом он выдаёт на выходе
. При этом он выдаёт на выходе ![]() .
.
Так как ![]() и является максимальным значением, то при
и является максимальным значением, то при ![]() мы имеем
мы имеем ![]() .
.
Тогда
 .
.
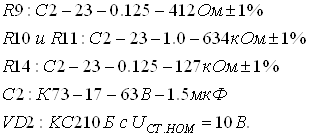
Изобразим ПИ–РТЯ.
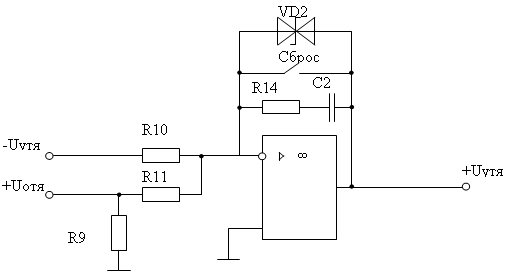
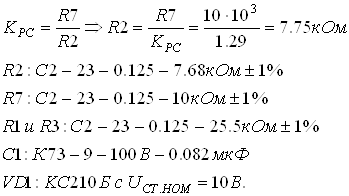
Рис.9. Принципиальная схема ПИ–РТЯ.
В качестве ОУ выбираем прецизионный ОУ типа КР140УД17А [3].
Он имеет следующие параметры:
![]()
В начальное значение времени необходимо обнулить интеграторы. Для этого будим использовать аналоговый ключ типа КР590КН2, который содержит в себе два ключа. Пусть
![]() , тогда
, тогда

Используя [3] выбираем резисторы, конденсатор и стабилитрон, а также пользуясь стандартным рядом Е96.
Выбор элементов контура скорости.
Двигатель 4ПФ112L поставляется со встроенным тахогенератором типа ТП80-20-0.2.
Его параметры:
Крутизна выходной характеристики ![]() .
.
Номинальная скорость вращения ![]() .
.
Максимальная скорость вращения ![]() .
.
В нашем случае при ![]() напряжение на выходе тахогенератора:
напряжение на выходе тахогенератора:
![]() .
.
![]()
Изобразим принципиальную схему П-РС.
 | |||||||
| |||||||
 | |||||||||
| |||||||||
 | |||||||||
Рис.10. Принципиальная схема П–РС
Нам нужно получить ![]() . Для этого мы поменяем полярность тахогенератора и поставим делитель напряжения на резисторах
. Для этого мы поменяем полярность тахогенератора и поставим делитель напряжения на резисторах ![]()
П–РС реализуем на ОУ типа КР140УД17А.
Пусть ![]() , тогда
, тогда
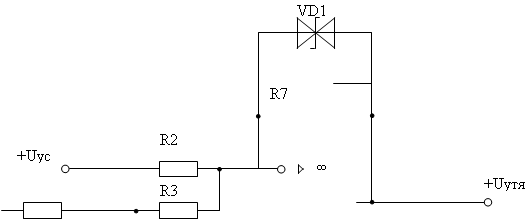
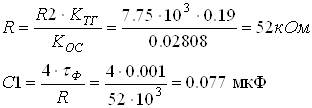
Выбор элементов ПИ-РТВ.
Изобразим ПИ-РТВ.
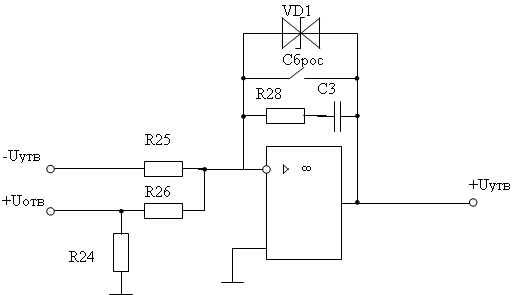
Рис.11. Принципиальная схема ПИ–РТВ.
В качестве датчика тока возбуждения выбираем датчик тока ДТХ–25, принцип действия которого основан на эффекте Холла.
При ![]() (номинальные значения).
(номинальные значения).

У нас ![]() . При этом мы должны получить
. При этом мы должны получить ![]() .
.
 .
.
Для ПИ-РТВ используем ОУ типа КР140УД17А. Выбираем ![]() .
.

Выбираем:
Похожие работы





... . Целью дипломного проекта является разработка и исследование автоматической системы регулирования (АСР) асинхронного высоковольтного электропривода на базе автономного инвертора тока с трехфазным однообмоточным двигателем с детальной разработкой программы высокого уровня при различных законах управления. В ходе конкретизации из поставленной цели выделены следующие задачи. Провести анализ ...

... сопротивления в цепи были равны, как на примере сумматора. (рис. 16). Рис.16. Принимаем R11=R12=R13=10kОм Заключение В ходе выполнения курсового проекта по дисциплине "Системы управления электроприводом" были получены важные навыки разработки типовых алгоритмов управления промышленными механизмами, выбора структуры системы регулирования, расчета требуемых параметров устройств. ...
... значений выходных переменных по требуемому закону. В каждой из этих задач управляющей системе требуется сформировать выходное воздействие, реализация которого компенсирует образовавшуюся ошибку управления. 1 Техническое задание Разработать систему управления механизмом передвижения тележки мостового крюкового крана (мехатронного объекта) с техническими характеристиками: Вариант ...
... обмоток трансформатора: Ом Rуд – активное сопротивление уравнительных дросселей: Ом. Итак, Ом Ом. Выводы по главе 1. В главе 1 на основе технических данных и требований электропривода подъемного механизма крана был произведен выбор схемы ЭП. В результате анализа и обзора применяемых систем регулирования показана целесообразность применения системы тиристорный преобразователь – ...
0 комментариев