Навигация
Выбор элементов задатчика тока возбуждения
8849
знаков
6
таблиц
13
изображений
3. Выбор элементов задатчика тока возбуждения
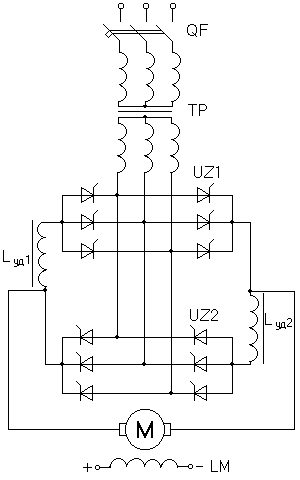
Контур регулирования потока состоит из датчика ЭДС на сопротивлениях R18,R19,L1M1 гальванически развязывающего операционного усилителя DA1 типа ISO16p.
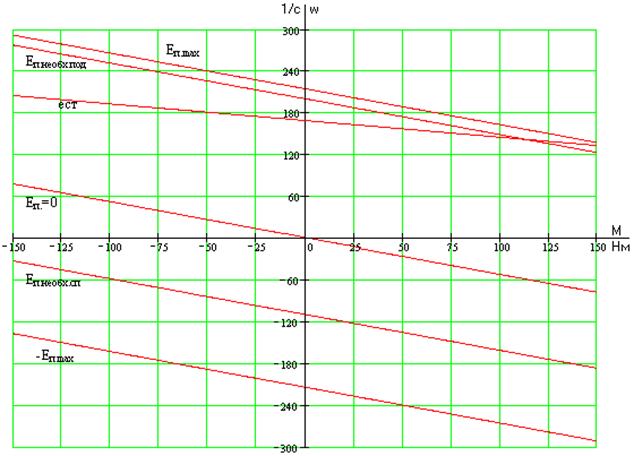
Сопротивление цепочки R18,R19,L1M1 выбираются исходя из того чтобы на вход микросхемы DA1 подавалось напряжение 200 мВ при максимальной скорости вращения двигателя ![]() .
.
Учитывая, что на выходе DA1 максимальное напряжение составляет ![]() В коэффициент усиления выбираем 8,тогда
В коэффициент усиления выбираем 8,тогда
![]()
Примем Uze=10В и реализуем вычитатель на ОУ КР140УД17А. Он вырабатывает на выходе сигнал рассогласования (Uze-Eя).
При R1=R3 и R2=R4 нам требуется ![]() .
.
Тогда ![]() Это значение мы имеем при максимальном рассогласовании.
Это значение мы имеем при максимальном рассогласовании.
Задаёмся ![]() , тогда
, тогда
![]()
Выбираем:

Изобразим принципиальную схему задатчика тока возбуждения.
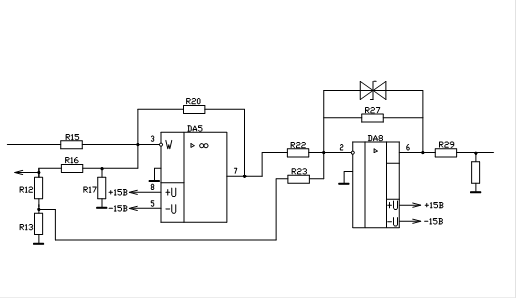
Рис.12. Принципиальная схема задатчика тока возбуждения.
Итак, данный сигнал рассогласования теперь поступает на вход нелинейного элемента, который имеет характеристику рис.2, т.к. сигнал Uze поступает на вход ПИ–РТВ в инвертном виде. Эта характеристика показана на рис.2.
Для синтеза такой характеристики используем ограничитель на ОУ типа КР140УД8А.
Допустим, что ветвь, связывающая Uсм со входом ОУ через R23 отсутствует, а к ОУ присоединены: стабилитрон КС150А с ![]() и резисторы R22 и R27.
и резисторы R22 и R27.
Выбираем:

Тогда DA8 будет работать, как ограничитель, если поставить на выходе DA8 делитель R29,R30 т.к. стабилитронов на 1В нет.
Выбираем:

Выбираем:

4. Разработка конструкции блока управления
При разработке конструкции блока управления необходимо учитывать ряд факторов, влияющих на конструктивное исполнение блока. Будем считать, что плата модуля управления входит в общий блок системы управления, т.е. является отдельным её модулем. Модуль управления вставляется в общий блок по направляющим, позволяющим точно совместить разъём с ответной частью. Для удобства монтажа на передней панели предусмотрена ручка.
Блок управления сконструирован на печатной плате из текстолита фольгированного марки СФ1 ГОСТ10316-78.
Размеры печатной платы выбраны исходя из размещения на ней всех элементов. Сначала были расположены все элементы с соответствующими им размерами. И, исходя из того, какую площадь они занимают, были выбраны размеры платы из ряда стандартных размеров. Площадь платы составляет ![]() .
.
Размеры элементов были выбраны в соответствии со стандартными размерами [5].
Ниже приведены эти элементы и их размеры [5].
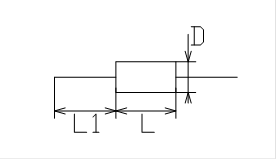
Резистор.
В схеме присутствуют два вида резисторов С2–23 с разной номинальной мощностью.
| Тип резистора | Номинальная мощность | Размеры, мм | ||
| D | L | L1 | ||
| С2–23 | 0.125 | 2 | 6 | 20 |
| 1 | 6.6 | 13 | 25 | |
 |
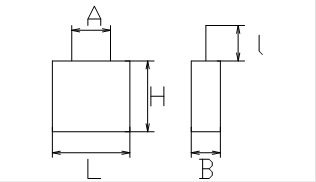
Конденсаторы.
В схеме присутствуют три вида конденсаторов К73–9, К73–17 и К10–17.
| Тип конденсатора | Размеры, мм | ||||
| L | B | H | l | A | |
| К73–9 | 20 | 8 | 11 | 25 | 12.5 |
| К73–17 | 18 | 8.5 | 19 | 25 | 15 |
| К10–17 | 6.8 | 4.6 | 5.5 | 20 | 2.5 |
 |
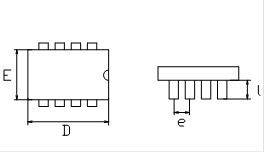
Микросхемы.
В схеме присутствуют три вида микросхем: операционные усилители (КР140УД17А и КР140УД8А), а так же логический ключ (КР590КН2).
| Тип | Корпус | Размеры, мм | |||||
| n | D | E | l | A | e | ||
| КР140УД17А | 2101.8-2 | 8 | 12 | 7.5 | 7,5 | 5 | 2.5 |
| КР140УД8А | 201.8-1 | 8 | 12 | 7.5 | 5 | 5 | 2.5 |
| КР590КН2 | 238.16-8 | 16 | 20 | 7.5 | 5 | 5 | 2.5 |
 |
Для уменьшения токов утечки по поверхностям платы её необходимо покрыть с двух сторон лаком, например типа К-47.
Напряжение питания схем, сигналы с датчиков, выходные сигналы регуляторов подаются и снимаются со схемы посредством разъёма типа СНО51–30/59*9Р–2.
Список литературы
1. В.И. Ключев Учебное пособие по курсу теория автоматизированного электропривода М. 1978.
2. И.П. Копылов Справочник по электрическим машинам М. 1988.
3. М.Ю. Масколенков, Е.А. Соболев Справочник разработчика и конструктора РЭА. Элементная база. М. 1996.
4. В.А. Елисеев, А.В. Шинянский Справочник по автоматизированному электроприводу М.1983.
5. А.И. Горобец, А.И. Степаненко, В.М. Коронкевич. Справочник по конструированию радиоэлектронной аппаратуры. Печатные узлы. Киев 1985.
Похожие работы





... . Целью дипломного проекта является разработка и исследование автоматической системы регулирования (АСР) асинхронного высоковольтного электропривода на базе автономного инвертора тока с трехфазным однообмоточным двигателем с детальной разработкой программы высокого уровня при различных законах управления. В ходе конкретизации из поставленной цели выделены следующие задачи. Провести анализ ...

... сопротивления в цепи были равны, как на примере сумматора. (рис. 16). Рис.16. Принимаем R11=R12=R13=10kОм Заключение В ходе выполнения курсового проекта по дисциплине "Системы управления электроприводом" были получены важные навыки разработки типовых алгоритмов управления промышленными механизмами, выбора структуры системы регулирования, расчета требуемых параметров устройств. ...
... значений выходных переменных по требуемому закону. В каждой из этих задач управляющей системе требуется сформировать выходное воздействие, реализация которого компенсирует образовавшуюся ошибку управления. 1 Техническое задание Разработать систему управления механизмом передвижения тележки мостового крюкового крана (мехатронного объекта) с техническими характеристиками: Вариант ...
... обмоток трансформатора: Ом Rуд – активное сопротивление уравнительных дросселей: Ом. Итак, Ом Ом. Выводы по главе 1. В главе 1 на основе технических данных и требований электропривода подъемного механизма крана был произведен выбор схемы ЭП. В результате анализа и обзора применяемых систем регулирования показана целесообразность применения системы тиристорный преобразователь – ...
0 комментариев