Навигация
Система автосопровождения источника сигнала по направлению
14392
знака
0
таблиц
9
изображений
Агентство по образованию Российской Федерации
Уральский Государственный Технический Университет – УПИ
Кафедра «Радиотехнических систем»
Оценка работы
Пояснительная записка к курсовой работе:
«Система автосопровождения источника сигнала по направлению»
по предмету «Радиоавтоматика».
Руководитель: Маевская Е.А.
Студент: Симонов С.А.
Группа Р-434
Екатеринбург 2006
Содержание
Введение
Исходные данные
Задание
1. Общие сведения о системе
2. Выбор номинального значения петлевого усиления
3. Расчет параметров сглаживающих цепей
3.1 Расчет системы без коррекции
3.2 Расчет корректирующего звена
3.3 Расчет системы с коррекцией
4. Расчет дисперсии ошибки слежения
Заключение
Библиографический список
Приложение 1. ЛАЧХ системы до коррекции
Приложение 2. ФЧХ системы до коррекции
Приложение 3. ЛАЧХ системы после коррекции
Приложение 4. ФЧХ системы после коррекции
Введение
Объектом курсового проектирования является система радиоавтоматики (следящая радиотехническая система), осуществляющая выделение какого-либо параметра радиотехнического сигнала с использованием принципа обратной связи.
Перечень исходных данных и требуемых значений показателей качества формулируются преподавателем – руководителем курсовой работы и может быть различным в зависимости от концепции руководителя.
В качестве исходных данных задается тип следящей радиотехнической системы, порядок ее астатизма, постоянная времени простого инерционного звена, полоса пропускания радиоприемного устройства, максимальное значение отношения мощностей сигнала и помехи на выходе линейной части радиоприемного устройства. В качестве характеристик воздействия фигурируют максимальные значения скорости и ускорения параметра сигнала, за которым следит система.
Целью проектирования является расчет основных параметров системы, удовлетворяющих системе заданных показателей качества.
Исходные данные
Система автосопровождения источника сигнала по направлению (АСН).
Порядок астатизма системы – первый.
Постоянная времени простого инерционного звена: T = 0,5 с.
Максимальная скорость воздействия: a1 = 10 º/с.
Максимальное ускорение воздействия: a2 = 5 º/с2.
∆fэ= 20 кГц - эквивалентная полоса пропускания линейной части приёмника.
Отношение сигнал/шум: q2max= 10.
Переходный режим: 10 º/с.
Граница апертуры: Q=2º.
Задание
Рассчитать:
1. Номинальное значение петлевого усиления из условий:
а). Динамическая ошибка в стационарном режиме не превышает 5% полуапертуры при полиномиальном воздействии.
б). Амплитуда ошибки слежения в стационарном режиме при действии эквивалентной синусоиды с заданными максимальными значениями скорости и ускорения воздействия не превышает указанного выше значения.
в). Максимальное значение ошибки в переходном режиме при скачке скорости воздействия не превышает 50% полуапертуры.
2. Параметры сглаживающей цепи из условий:
а). Запас устойчивости по фазе не менее 30%.
б). СКО ошибки слежения, вызванной действием помехи с заданным значением ![]() , не превышает 20% полуапертуры.
, не превышает 20% полуапертуры.
1. Общая характеристика системы
Системы автоматического слежения за направлением прихода радиосигнала широко используются в радиолокации, радионавигации, радиоуправлении для измерения угловых координат источника сигнала
Функциональная схема системы углового сопровождения показана на рис. 1.
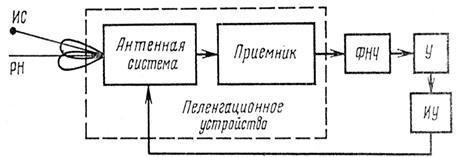
Рис.1. Функциональная схема АСН
В ее состав входят: пеленгационное устройство, фильтр (ФНЧ), усилитель (У) и исполнительное устройство (ИУ).
Пеленгационное устройство, играющее роль углового дискриминатора, состоит из антенны и приемника, в котором проводится обработка принятого радиосигнала. При отклонении источника сигнала (ИС) от некоторого направления РН, называемого равносигнальным направлением антенны, на выходе пеленгационного устройства появляется напряжение ![]() , зависящее от величины и знака этого отклонения. Напряжение
, зависящее от величины и знака этого отклонения. Напряжение ![]() далее фильтруется, усиливается и воздействует на исполнительное устройство. Исполнительное устройство изменяет положение антенны или состояние ее отдельных элементов так, что равносигнальное направление антенны смещается в пространстве и исходное угловое рассогласование между ним и направлением на источник сигнала уменьшается.
далее фильтруется, усиливается и воздействует на исполнительное устройство. Исполнительное устройство изменяет положение антенны или состояние ее отдельных элементов так, что равносигнальное направление антенны смещается в пространстве и исходное угловое рассогласование между ним и направлением на источник сигнала уменьшается.
Угловое положение источника сигнала в пространстве обычно оценивается углами ![]() и
и ![]() , отсчитываемыми в двух взаимно перпендикулярных плоскостях: горизонтальной и вертикальной. В этих же плоскостях измеряется угловое рассогласование между равносигнальным направлением антенны и направлением на источник сигнала и осуществляется управление положением антенны.
, отсчитываемыми в двух взаимно перпендикулярных плоскостях: горизонтальной и вертикальной. В этих же плоскостях измеряется угловое рассогласование между равносигнальным направлением антенны и направлением на источник сигнала и осуществляется управление положением антенны.
Важным звеном системы углового сопровождения является пеленгатор. На практике находят применение двух типов: с одновременным и с последовательным сравнением сигналов. Более высокую точность измерения позволяют получить пеленгаторы первого типа, называемые также моноимпульсными пеленгаторами.
К пеленгаторам второго типа относятся пеленгаторы с коническим сканированием и с переключением диаграммы направленности.
В курсовой работе рассматривается АСН с пеленгатором с коническим сканированием. Рассмотрим принцип его работы.
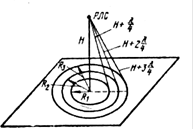
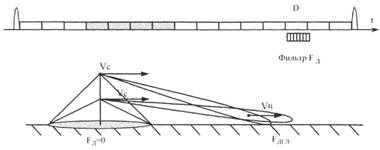
Функциональная схема пеленгатора с коническим сканированием показана на рис. 2.
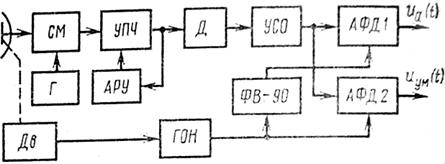
Рис.2. Функциональная схема пеленгатора с коническим сканированием
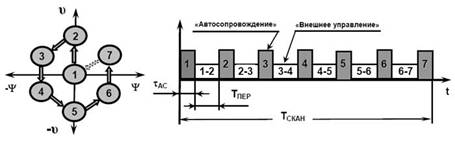
Этот пеленгатор, являющийся одним из вариантов пеленгатора с последовательным сравнением сигналов, работает следующим образом. Двигатель (Дв) вращает с круговой частотой ![]() облучатель антенны, смещенный относительно фокальной оси, обеспечивая тем самым сканирование диаграммы направленности антенны в пространстве. Направление максимума диаграммы при сканировании образует круговой конус, ось которого является равносигнальным направлением антенны. При отклонении источника сигнала от равносигнального направления радиосигнал на выходе антенны приобретает амплитудную модуляцию с частотой сканирования. Глубина модуляции определяется величиной отклонения, а фаза - направлением отклонения.
облучатель антенны, смещенный относительно фокальной оси, обеспечивая тем самым сканирование диаграммы направленности антенны в пространстве. Направление максимума диаграммы при сканировании образует круговой конус, ось которого является равносигнальным направлением антенны. При отклонении источника сигнала от равносигнального направления радиосигнал на выходе антенны приобретает амплитудную модуляцию с частотой сканирования. Глубина модуляции определяется величиной отклонения, а фаза - направлением отклонения.
Сигнал с выхода антенны в приемнике преобразуется по частоте, усиливается в УПЧ, охваченном инерционной системой АРУ, и детектируется. Выделенная детектором Д огибающая амплитудно-модулированного радиосигнала фильтруется и усиливается в избирательном усилителе сигнала ошибки УСО, настроенном на частоту сканирования. Затем она поступает на амплитудно-фазовые детекторы АФД1 и АФД2 азимута и угла места, где перемножается с опорными колебаниями ![]() и
и ![]() , которые вырабатываются генератором опорных напряжений ГОН и синхронизированы со сканированием диаграммы направленности антенны. В результате перемножения на выходах амплитудно-фазовых детекторов формируются напряжения, пропорциональные отклонению источника сигнала от равносигнального направления по азимуту и углу места. Эти напряжения, являющиеся выходными напряжениями пеленгатора, после усиления и фильтрации используются для управления положением равносигнального направления антенны.
, которые вырабатываются генератором опорных напряжений ГОН и синхронизированы со сканированием диаграммы направленности антенны. В результате перемножения на выходах амплитудно-фазовых детекторов формируются напряжения, пропорциональные отклонению источника сигнала от равносигнального направления по азимуту и углу места. Эти напряжения, являющиеся выходными напряжениями пеленгатора, после усиления и фильтрации используются для управления положением равносигнального направления антенны.
Достоинством пеленгаторов этого типа является сравнительная простота.
Недостатком пеленгатора с коническим сканированием, по сравнению с моноимпульсным, является меньшая точность, что обусловлено его чувствительностью к амплитудным флуктуациям сигнала и некоторыми другими факторами.
2. Выбор номинального значения петлевого усиления
Расчёт петлевого коэффициента передачи выполняем исходя из трёх условий:
2.1 Из условия, что динамическая ошибка в стационарном режиме не должна превышать значения 5% полуапертуры дискриминатора системы.
Полуапертура дискриминатора равна половине значения разрешающей способности:
![]()
Необходимо обеспечить, чтобы динамическая ошибка в стационарном режиме не превышала значения 5% полуапертуры дискриминатора системы, что составляет:
![]()
Минимально допустимое значение номинального коэффициента усиления определяется выражением [2]:
2.2 Из условия, что амплитуда ошибки при действии на систему эквивалентной синусоиды при заданном ускорении не должна превышать значения 5% полуапертуры дискриминатора системы:
Амплитуда эквивалентного динамического воздействия равна [2]:
Частота эквивалентного динамического воздействия равна [2]:
Минимально допустимое значение номинального коэффициента усиления определяется выражением [2]:
2.3 Из условия, что максимальное значение ошибки в переходном режиме не должно превышать значения 50% полуапертуры дискриминатора системы при заданном значении скачка скорости воздействия:
Максимальное значение ошибки слежения при ступенчатом изменении скорости в зависимости от КП приближенно описывается выражением:
![]()
При этом должно выполнятся условие: Хмакс < 0.5 Ха
Решая данную систему, находим результат:
![]()
Исходя из этих условий выбираем:
![]()
Похожие работы
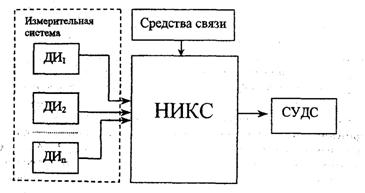

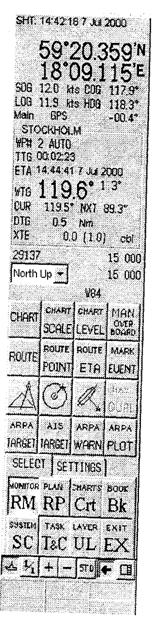
... информации. Набираемая информация отображается на дисплее, что позволяет контролировать ее правильность. Клавиатура и дисплей АИС должны быть независимыми от других навигационных устройств. Судовыми системами отображения АИС могут быть система отображения электронных карт (ECDIS, ECS, RCDS), РЛС, САРП или дисплей персонального компьютера. АИС и связанные с ней датчики информации питаются от ...

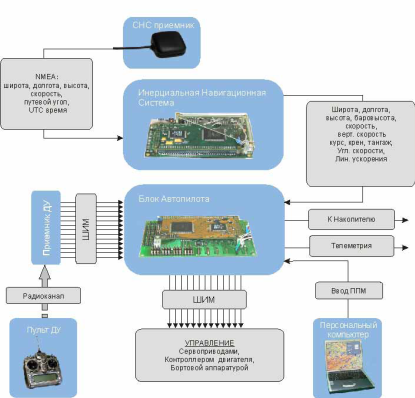
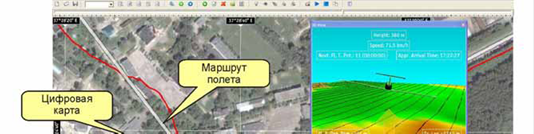
... бортовыми средствами БЛА, на пункт управления. Бортовой комплекс навигации и управления БЛА Бортовой комплекс "Аист" является полнофункциональным средством навигации и управления беспилотного летательного аппарата (БЛА) самолетной схемы. Комплекс обеспечивает: определение навигационных параметров, углов ориентации и параметров движения БЛА (угловых скоростей и ускорений); навигацию и ...
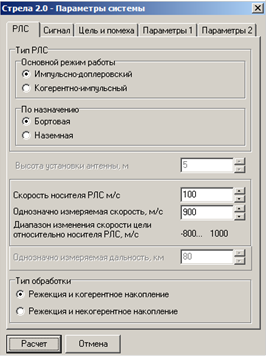

... ) целей вплоть до их типа с ранжированием по степени важности (опасности); o выдача команд целеуказания средствам поражения и формирование для них команд радиокоррекции; o точное определение расположения препятствий на пути следования вертолета. Расчет параметров РЛС радиоэлектронный защита помеха Расчет будем производить с помощью программы "Стрела". В окне параметров системы на пяти ...

... систем и групповых действий; · разработкой эффективных средств защиты; использованием своих средств РЭБ в интересах помехозащиты. Что же касается помехопостановки, то здесь требуется разработка новых алгоритмов и более быстродействующих вычислительных устройств. Так же хорошо бы разработать алгоритмы, позволяющие отслеживать изменение ситуации в реальном времени. Таким образом, на устройства ...
0 комментариев