Навигация
Расчет параметров сглаживающих цепей
14392
знака
0
таблиц
9
изображений
3. Расчет параметров сглаживающих цепей
3.1 Расчет системы без коррекцииПроектируемая система – система автоматического сопровождения по дальности с астатизмом первого порядка. Передаточная функция такой системы (с астатизмом первого порядка) в разомкнутом состоянии имеет вид:
Для того чтобы сделать вывод об устойчивости системы, построим логарифмическую амплитудно-частотную L(jw) и фазо-частотную j(jw) характеристики:
![]()
![]()
где ![]() .
.



![]()
Рассматривая ЛАЧХ системы первого порядка астатизма в различных диапазонах частот, получаем:

Таким образом, ЛАЧХ имеет наклон -20 дБ/дек на частотах
0 < w £ 2 (c-1) и - 40 дБ/дек на частотах w > 2 (c-1).
![]()
![]()
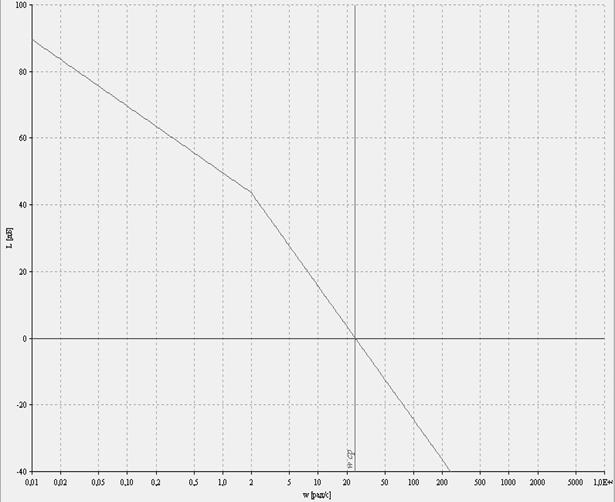
Получаем выражение для ФЧХ системы первого порядка астатизма:
![]()
Графики ЛАЧХ и ФЧХ системы до коррекции приведены в Приложениях 1 и 2.
Найдём частоту среза системы – частоту на которой L(jw) = 0:

Решаем биквадратное уравнение:

![]() =24,1
=24,1
Вычислим величину запаса устойчивости по фазе
![]() ;w = wСР
;w = wСР
![]()
Как видно, система имеет недостаточный запас устойчивости по фазе. Для коррекции используем последовательную цепь – пропорционально-интегрирующий фильтр.
3.2 Расчет корректирующего звенаПропорционально-интегрирующий фильтр имеет передаточную функцию:

где Т1 < T2.
Рассчитае постоянные времени форсирующего Т1 и инерционного Т2 звеньев.
Необходимый запас устойчивости по фазе: ![]() .
.
 Т1=0,07 с;
Т1=0,07 с;
 Т2=0,005 с
Т2=0,005 с
Рассчитаем логарифмическую амплитудно-частотную L(jw) и фазо-частотную j(jw) характеристики:
![]()
![]()
где ![]()


![]()
Рассматривая ЛАЧХ пропорционально-интегрирующего фильтра в различных диапазонах частот, получаем:
Таким образом, ЛАЧХ имеет наклон 0 дБ/дек на частотах
0 < w < 14,286 (c-1), 20 дБ/дек на частотах 14,286 £ w £ 200 (c-1) и 0 дБ/дек на частотах w > 200 (c-1).

Получаем выражение для ФЧХ пропорционально-интегрирующего фильтра:
![]()
Передаточная функция системы с корректирующим звеном имеет вид:
Для исследования устойчивости полученной системы, рассчитаем логарифмическую амплитудно-частотную L(jw) и фазо-частотную j(jw) характеристики:
![]()
![]()
где ![]()




![]()
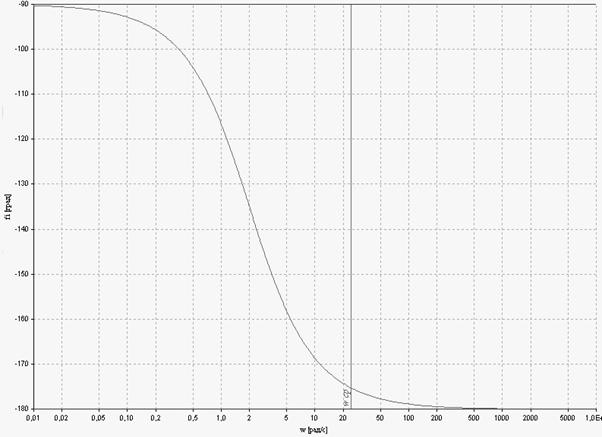
Рассматривая ЛАЧХ системы с коррекцией в различных диапазонах частот, получаем:
Таким образом, ЛАЧХ имеет наклон -20 дБ/дек на частотах 0 < w £ 2 (c-1), -40 дБ/дек на частотах 2 < w £ 14,286 (c-1), -20 дБ/дек на частотах 14,286 < w £ 200 (c-1) и -40 дБ/дек на частотах w > 200 (c-1).

Получаем выражение для ФЧХ системы с коррекцией:

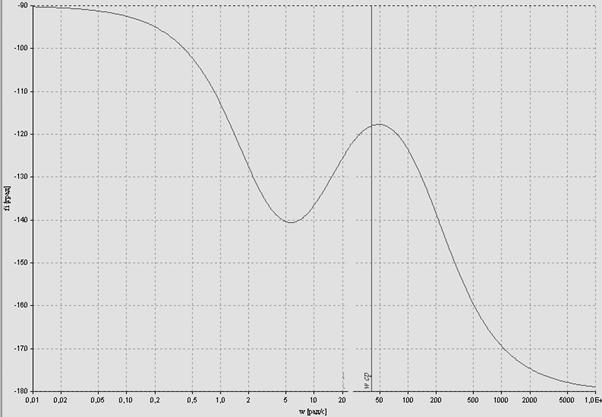
Графики ЛАЧХ и ФЧХ системы после коррекции приведены в Приложениях 3 и 4.
Находим частоту среза и запас устойчивости по фазе системы с коррекцией. Получаем:
![]() - частота среза системы с коррекцией.
- частота среза системы с коррекцией.
![]() - запас устойчивости по фазе системы с коррекцией.
- запас устойчивости по фазе системы с коррекцией.
Делаем вывод, что система с выбранной коррекцией будет устойчива, о чём свидетельствуют следующие признаки:
1) Частота среза находится на участке характеристики с наклоном -20дБ/дек.
2) Наклон ЛАЧХ на высоких частотах не превышает -40 дБ/дек.
3) Запас устойчивости по фазе более 300.
4. Расчет дисперсии ошибки слежения
Для расчета дисперсии флуктуационной составляющей ошибки слежения можно воспользоваться частотным методом:
 ,
,
где Sэ(w) = Sn(w)/KД2 – спектральная плотность мощности помехи n(t), пересчитанной на вход дискриминатора (спектральная плотность эквивалентной помехи),
– комплексный коэффициент передачи замкнутой следящей системы.
При слабой зависимости Sэ(w) от частоты w в пределах полосы пропускания замкнутой следящей системы можно полагать ![]() , вынести ее из под интеграла и получить:
, вынести ее из под интеграла и получить:
sх2 » Sэ×DFэ ,
 ,
,
– эквивалентная шумовая полоса линеаризованной следящей системы.
Вычисление интеграла можно произвести по формуле:

При этом подынтегральное выражение можно представить виде квадрата модуля дробно-рациональной функции:

Для N = 3:



Откуда получаем коэффициенты:
с0 = КП, с1 = КПТ1, с2 = 0.
d0 = КП, d1 = КПТ1 + 1, d2 = (T+Т2), d3 = TТ2.
В результате получаем:


![]()
Эквивалентная спектральная плотность помех углового дискриминатора с каноническим сканированием:
 ,
,
где ![]() - отношение мощностей сигнала и помехи на выходе линейной части дискриминатора,
- отношение мощностей сигнала и помехи на выходе линейной части дискриминатора,
![]() - нормированная крутизна диаграммы направленности антенны на равносигнальном направлении,
- нормированная крутизна диаграммы направленности антенны на равносигнальном направлении,
а – коэффициент, зависящий от формы частотной характеристики УПЧ, лежащий в пределах от 0,5 до 1.
Тогда 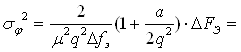
По условию СКО ошибки слежения не должно превышать 20% полуапертуры:
![]() <0,2 - данное условие выполняется.
<0,2 - данное условие выполняется.
Заключение
Расчёт петлевого коэффициента передачи выполнен исходя из трёх условий. По первому условию (динамическая ошибка в стационарном режиме не превышает 5% полуапертуры) значение коэффициента передачи не меньше 200, по второму условию – не меньше 206,155, по третьему условию (максимальное значение ошибки в переходном режиме при скачке скорости воздействия не превышает 50% полуапертуры) – не меньше 60,803. Учтя все эти условия, был выбран петлевой коэффициент передачи ![]() .
.
При использовании параллельной коррекции удалось подобрать постоянные времени так, что ЛАЧХ в районе частоты среза имеет наклон 20 дБ/дек и запас по фазе составляет около 62,2°.
Все расчеты выполнялись в математическом пакете Mathcad 2001i Professional. Графики были построены в программе для лабораторной работы №3 по курсу «Радиоавтоматика». Их правильность была проверена в Mathcad 2001i Professional.
Курсовой проект можно считать выполненным, т.к. номинальное значение петлевого усиления и параметры сглаживающей цепи были рассчитаны и полученая система полностью удовлетворяет требованиям технического задания.
Библиографический список
1. Первачёв С.В. Радиоавтоматика: Учебник для вузов. – М.: Радио и связь, 1982.
2. Астрецов Д.В. Системы радиоавтоматики: Методические указания к выполнению курсовой работы. – Екатеринбург.: Издательство УГТУ 1997.
3. Коновалов Г.Ф. Радиоавтоматика: Учебник для вузов. – М.: Высшая школа, 1990.
Приложение 1.
ЛАЧХ системы до коррекции
Приложение 2
ФЧХ системы до коррекции
Приложение 3
ЛАЧХ системы после коррекции
Приложение 4
ФЧХ системы после коррекции
Похожие работы

... информации. Набираемая информация отображается на дисплее, что позволяет контролировать ее правильность. Клавиатура и дисплей АИС должны быть независимыми от других навигационных устройств. Судовыми системами отображения АИС могут быть система отображения электронных карт (ECDIS, ECS, RCDS), РЛС, САРП или дисплей персонального компьютера. АИС и связанные с ней датчики информации питаются от ...

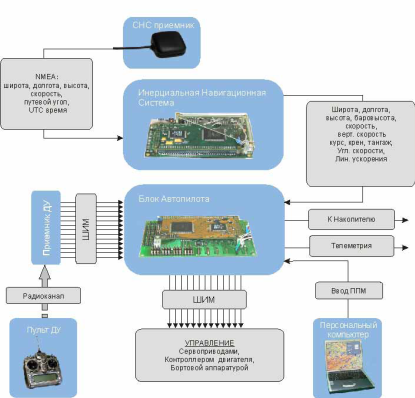
... бортовыми средствами БЛА, на пункт управления. Бортовой комплекс навигации и управления БЛА Бортовой комплекс "Аист" является полнофункциональным средством навигации и управления беспилотного летательного аппарата (БЛА) самолетной схемы. Комплекс обеспечивает: определение навигационных параметров, углов ориентации и параметров движения БЛА (угловых скоростей и ускорений); навигацию и ...
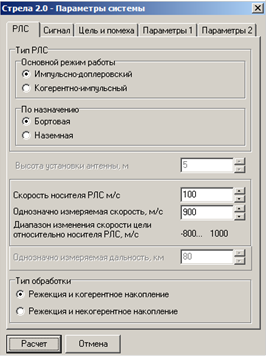

... ) целей вплоть до их типа с ранжированием по степени важности (опасности); o выдача команд целеуказания средствам поражения и формирование для них команд радиокоррекции; o точное определение расположения препятствий на пути следования вертолета. Расчет параметров РЛС радиоэлектронный защита помеха Расчет будем производить с помощью программы "Стрела". В окне параметров системы на пяти ...

... систем и групповых действий; · разработкой эффективных средств защиты; использованием своих средств РЭБ в интересах помехозащиты. Что же касается помехопостановки, то здесь требуется разработка новых алгоритмов и более быстродействующих вычислительных устройств. Так же хорошо бы разработать алгоритмы, позволяющие отслеживать изменение ситуации в реальном времени. Таким образом, на устройства ...
0 комментариев