Визначимо передатні функції розімкненої та замкненої САК відносно вхідної
Побудова логарифмічної частотної характеристики САК та визначення
Для заданого типу вхідної дії розрахунок та побудова графіку усталеної помилки скорегованої САК
Визначення періоду дискретизації імпульсного елемента
Для заданого типу вхідної дії розрахунок та побудова графіку усталеної помилки ДСАК
Навигация
Побудова логарифмічної частотної характеристики САК та визначення
Одноосьовий гіроскопічний стабілізатор
25465
знаков
1
таблица
21
изображение
3.5 Побудова логарифмічної частотної характеристики САК та визначення
запасів стійкості
1) Знаючи перехідну характеристику розімкненої САК
w(s)=![]() ,
,
знайдемо нульову контрольну точку: L0 = 20lgk = 20lg7,5 = 17,5 дБ.
2) Визначимо спряжені частоти: ω1 = ![]() = 50с-1; ω2 =
= 50с-1; ω2 = ![]() = 3,3с-1.
= 3,3с-1.
3) Враховуючи, що до складу системи входить пропорційна, інтегруюча та дві аперіодичні ланки першого порядку ЛАХ і ЛФХ для даної САК (рис. 7).
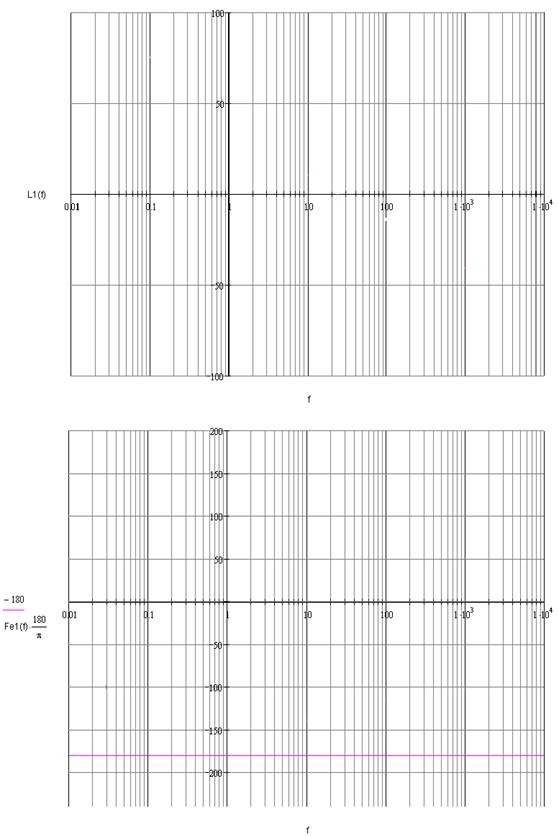
Рис. 7. Відповідно логарифмічно амплітудна та логарифмічно частотна характеристики системи автоматичного керування
Як видно з графіків, оскільки ЛАХ перетинає вісь 0ω під нахилом -40, а ЛФХ перетинає пряму –π, система є нестійкою.
Знайдемо запаси стійкості системи за ЛАХ та ЛФХ:
· по амплітуді: ΔL = 20lg (w(j*ωс)), де ωс – частота, за якої φ(ωc) = -π. З графіка видна ωc = 6 (див. рис.7). Тоді
ΔL = 20lg (w(j*ωс)) = 20lg (w(j*6)) = -17.
Порівнюємо з значенням визначеним критерієм Найквіста h=20lg(|1/Wcp|) = =20lg(|1/6|)= 17,016 з h=17 знайденому по рис. 7.
· по фазі: Δφ = π-Arg(w(j*ωз)), де ωз – частота зрізу, коли L(ωз) = 1, тобто
ωз = 6. Тоді Δφ = arg(w(j*6)) = -35°.
3.6 Використовуючи логарифмічні частотні характеристики, виконання
корекції САК в області середніх частот з метою отримання заданих
запасів стійкості по фазі та амплітуді
Корекцію системи проведемо при заданих якісних параметрах (час регулювання tp = 0,3с перерегулювання δ = 30%). Побудуємо ЛАХ бажаної роботи системи та корегуючого пристрою (рис. 8).
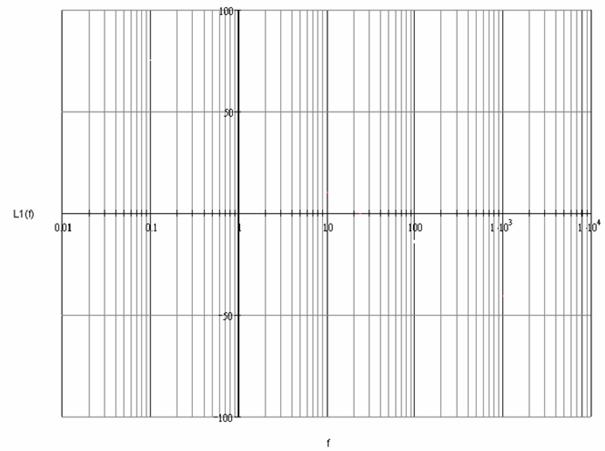
Рис. 8. ЛАХ заданої системи (Lз), бажаної (Lб) та коректую чого пристрою (Lк)
Складемо передаточні характеристики для бажаної та корегуючої систем:
wб(s) = ![]() . Враховуючи, що wб(s) = wз(s)·wк(s), отримаємо wк(s) =
. Враховуючи, що wб(s) = wз(s)·wк(s), отримаємо wк(s) = ![]() .
.
3.7 Схема корегуючого пристрою та розрахунок його елементів
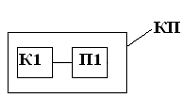
Приведемо схему корегуючого пристрою, обравши його з довідника. Згідно з наявною ЛАХ, що приведена вище, найбільше нашим вимогам задовольняють схеми №7 корегуючого пристрою (рис. 9).

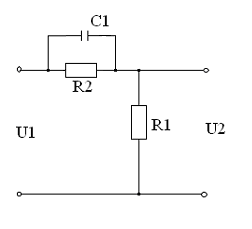
а) б)
Рис. 9. Схеми корегуючого пристрою та відповідні фрагменти ЛАХ:
а) фрагмент ЛАХ, що відповідає схемі №7; б) схема №7 (К2).
Розрахуємо кожен з елементів схеми:
1) L0= ,L¥=1.
,L¥=1.
Оберемо ємність конденсатора: С1=100мкФ.
2) Т1 = ![]() Þ
Þ![]() .
.
3) T2 =  Þ
Þ![]() Þ
Þ ![]() .
.
Оберемо підсилювач з таким коефіцієнтом: 20lgk=17,5, k=10(-17,5/20)=7,5 (П1).
Підберемо з ряду опорів Е24 відповідні значення опорів: R1 = 0,6 кОм, R2 = 3 кОм.
Загальна схема корегуючого пристрою має такий вигляд:
3.8 Розрахунок та побудова графіку перехідної характеристики скорегованої САК
Визначимо аналітичний вираз для перехідної характеристики замкнутої скоректованої системи за передаточною функцією розімкнутої САК при одиничному ступінчатому вхідному сигналі та побудуємо графік.
Передатна функція w(s) = ![]() .
.
Передатна функція замкненої системи:

Перехідна характеристика замкненої системи за вхідним сигналом: H(s)=G(s)*Ф(s), де G(s) = ![]() - одиничний ступінчатий вхідний сигнал.
- одиничний ступінчатий вхідний сигнал.
H(s) ![]()
Графік перехідної характеристики САК зображений на рис. 10.
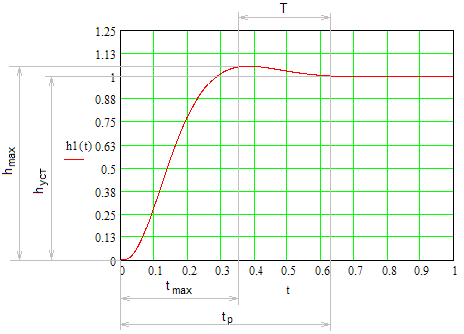
Рис. 10. Перехідна характеристика САКк
Похожие работы
... ї стабілізації різних рухомих об'єктів, в заспокоювача хитавиці корабля, для стабілізації літального апарату та інших, а також для визначення викривлення бурових свердловин, шахт і т.д. 3 Гіроскопи в науці В даний час деякі моделі мобільних телефонів та ігрових контролерів обладнуються датчиками прискорення, так званими акселерометра. Такі датчики дозволяють управляти цими пристроями, зді ...
0 комментариев