Визначимо передатні функції розімкненої та замкненої САК відносно вхідної
Побудова логарифмічної частотної характеристики САК та визначення
Для заданого типу вхідної дії розрахунок та побудова графіку усталеної помилки скорегованої САК
Визначення періоду дискретизації імпульсного елемента
Для заданого типу вхідної дії розрахунок та побудова графіку усталеної помилки ДСАК
Навигация
Для заданого типу вхідної дії розрахунок та побудова графіку усталеної помилки ДСАК
Одноосьовий гіроскопічний стабілізатор
25465
знаков
1
таблица
21
изображение
4.6 Для заданого типу вхідної дії розрахунок та побудова графіку усталеної помилки ДСАК
Дослідимо точність замкнутої системи за передаточною функцією розімкнутої САК. При дослідженні визначимо три коефіцієнти помилок С0, С1, С2, використовуючи передаточну функцію замкнутої системи за похибкою:
Фx(z) = ![]() .
.
Виконаємо заміну![]() , тоді отримаємо такий вираз:
, тоді отримаємо такий вираз:
 .
.
Для побудови графіку усталеної похибки визначимо коефіцієнти С0 та С1 – коефіцієнти похибок, які є коефіцієнтами розкладу передаточної функції системи за похибкою Фx(z) в ряд Маклорена за степенями s, тобто
 , в нашому випадку:
, в нашому випадку:

В загальному випадку при вхідній дії, що повільно змінюється, усталену похибку системи можна представити у вигляді ряду
![]()
В нашому випадку при g(n)=100n усталена похибка має вигляд:
![]()
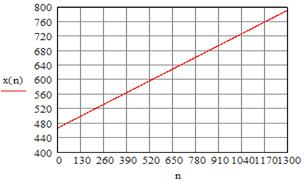
Рис. 19. Графік усталеної похибки ДСАК
4.7 Оцінка якості ДСАК
Для оцінки якості ДСАК розрахуємо та побудуємо перехідну характеристику.
![]()
![]()
![]()
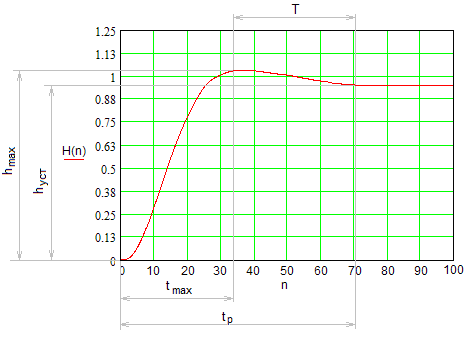
Рис. 20. Перехідна характеристика ДСАК
Оцінимо якість перехідних процесів у заданій системі:
- перерегулювання δ – відносне максимальне відхилення перехідної характеристики від усталеного значення вихідної координати, виражене у відсотках:
δ = ![]()
(hmax, hуст – відповідно максимальне та усталене значення перехідної характеристики для досліджуваної системи побачимо на графіку (рис.20))
δ = ![]() .
.
- час регулювання (час перехідного процесу) tp – мінімальний час, після сплину якого регульована координата буде залишатися близькою до усталеного значення із заданою точністю ![]() .
.
![]() , тоді tp = 70,6 c.
, тоді tp = 70,6 c.
- число коливань n, яке має перехідна характеристика h(t) за час регулювання tp:
n = 1.
Висновок: провівши аналіз ДСАК можна сказати, що отримана система після квантування є стійкою, коефіцієнт підсилення співпадає з коефіцієнтом підсилення лінійної САК; отримані результати вказують на те, що аналіз проведений правильно, хоча деякі якісні параметри ДСАК відрізняються від лінійної САК, це вказує на те, що деяка інформація про систему під час квантування все ж втрачається.
Висновок
При дослідженні та аналізі одноосьового гіроскопічного стабілізатора за критеріями Гурвіца, Найквіста система виявилася стійкою, але за частотними критеріями - не стійкою; за допомогою D – розбиття було досліджено, що для даної системи критичний коефіцієнт підсилення дорівнює 53. Виконали корекцію методом введення в систему корегую чого пристрою знайшли бажану передаточну функцію. Подальші дослідження проводилися за бажаною передатною функцією. Так оцінили якість скорегованої САК за такими параметрами: перерегулювання 5%, час перехідного процесу 0,6 с та число коливань n=1. Отримані параметри є допустимими, тому можна вважати, що робота скорегованої системи проходить якісно та точно.
Моделювання системи в програмному модулі Simulink дозволило показати графічно як на систему впливають різні вхідні сигнали та ще раз підтвердити точність проходження скорегованої САК.
Аналізуючи дискретну САК провели дослідження за критерієм Гурвіца та частотними критеріями, щоб потім порівняти результати з результатами лінійної САК. ДСАК дещо відрізняється від лінійної САК, що означає втрату деяких параметрів лінійної САК після її квантування. Хоча в цілому ДСАК за всіма досліджуваними критеріями є стійкою, а якість та точність перехідного процесу задовольняє допустимим параметрам.
Список літератури
1 Самотокін Б.Б. Лекції з теорії автоматичного керування. –Житомир ЖІТІ, 2001. -504с.
2 Топчеев Ю.И. Атлас для проектирования систем автоматического регулирования. –Москва „Машиностроение”, 1989. -752с.
3 Бесекерский В.А., Попов Е.П., Теория систем автоматического регулирования, 3 изд., М., 1975.
Похожие работы
... ї стабілізації різних рухомих об'єктів, в заспокоювача хитавиці корабля, для стабілізації літального апарату та інших, а також для визначення викривлення бурових свердловин, шахт і т.д. 3 Гіроскопи в науці В даний час деякі моделі мобільних телефонів та ігрових контролерів обладнуються датчиками прискорення, так званими акселерометра. Такі датчики дозволяють управляти цими пристроями, зді ...
0 комментариев