Фаза отключения
Проектирование кинематической схемы выключателя с приводом
Динамический анализ механизма
Построение фазовой траектории контактных стержней в фазе отключения
Определение времени отключения
Приведение сил статического сопротивления к штоку двигателя
Выбор силовой характеристики двигателя
Навигация
Динамический анализ механизма
Проектирование масляного выключателя
28025
знаков
9
таблиц
4
изображения
5. Динамический анализ механизма
Задача динамики - анализ загруженности реального механизма. Для упрощения её решения, механизм с одной степенью свободы с совокупностью всех звеньев и усилий заменяют эквивалентной с точки зрения загруженности привода динамической моделью.
Динамическая модель представляет собой одно звено – звено приведения, совершающая простое движение, с переменной массой mпр, с действующим на него усилием двигателя FДВ, приложенного со стороны привода и силами полезных и вредных сопротивлений FСТ.
Определение параметров mПР(Sш) – приведённой массы при поступательном движении звена приведения, называется приведением масс механизма. Основной этап построения динамической модели – приведение статических сил и статических моментов пар сил.
5.1 Приведение масс механизма в фазе отключения
В этом разделе строится приведенная динамическая схема механизма, рассмотрение движения которой позволяет выбрать параметры отключающей и буферной пружин. Этот этап работы называется приведением масс механизма [1].
Выражение для определения приведенной масс:
 (5.1) где:
(5.1) где:
Vпр – скорость точки приведения, м/с;
mj – масса j-ого звена механизма, кг;
Jj – момент инерцииj-ого звена относительно центра тяжести, кг/м2;
Vj – скорость центра тяжести j-ого звена, м/с;
ωj – угловая скорость j-ого звена, рад/с;
n – число Скорости Vj и ωj, входящие в формулу (5.1), должны быть выражены через скорость Vпр, однако так как на стадии проектирования неизвестны массы mj и моменты инерции Jj большинства звеньев механизма, то непосредственно формулой (5.1) воспользоваться нельзя. В данном случае прибегнем к различным упрощениям. Одно из них – пренебрежение в сумме (5.1) большинством малых слагаемых.
В качестве точки приведения может быть использована любая точка механизма. В данном случае возьмем точку Е1 крепления подвижного контакта, т.к. скорость подвижных контактов является определяющей при выборе параметров привода. Поскольку в рассматриваемой конструкции основной вклад в mпр вносят контактные стержни, с достаточной степенью точности можно принять
 (5.2) где
(5.2) где
Gk – вес одного контактного стержня, Н;
g – ускорение свободного падения, м/с2.
5.2 Определение параметров отключающей и буферной пружин
Оптимальные характеристики механизма при отключении достигаются в том случае, если зависимость скорости контактных стержней от их перемещения V(S) (фазовая траектория) имеет вид, показанный на рисунке 5.1.
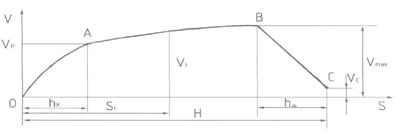
Рисунок 5.1. Фазовая траектория контактных стержней
Здесь обозначено: Vp - скорость контактных стержней в момент размыкания; hk - ход в контактах; Vmax - максимально допустимая скорость контактных стержней; H - полный ход контактных стержней.
На первом участке ОА механизм быстро разгоняется до заданной скорости Vp, затем с малым ускорением проходит основной участок пути АВ, и наконец, быстро тормозится на участке ВС. Быстрый разгон механизма на участке ОА обеспечивается параллельной работой отключающей и буферной пружин, а быстрое торможение в конце хода контактов – установкой демпфера.
Подобная фазовая траектория может быть получена за счет соответствующего выбора жесткостей Сот, Сб и предварительных натягов λо0 и λб0 отключающей и буферной пружин, обеспечивающего выполнение следующих трех условий:
1. Скорость разрыва контактов (точка А) должна быть равна заданной величине Vp;
2. Максимальная скорость контактов (точка В) не должна превосходить Vmax;
3. Отключающая пружина должна удерживать подвижные контакты в верхнем положении (точка С), преодолевая силу их веса с некоторым коэффициентом запаса k1.
Примем отношение длин O3М к O3E равным α, и согласно заданию, выберем из конструктивных соображений α=0.4. Тогда
![]() (мм), (5.3)
(мм), (5.3)
![]() (мм) (5.4) где
(мм) (5.4) где
λh – ход отключающей и буферной пружин, соответствующий ходу стержней в контактах, мм;
λоН – рабочий ход отключающей пружины, соответствующий полному ходу контактных стержней Н, мм.
![]()
![]()
![]()
![]()
|
 . (5.5)
. (5.5)
Тогда величина предварительного натяга буферной пружины λбо определяется как
![]() (мм). (5.6)
(мм). (5.6)
Задав коэффициент запаса k1, силу трения в контакте Fk и силу трения подвижного контакта в уплотнении Fy
![]() ,
,
![]() (Н), (5.7)
(Н), (5.7)
![]() (Н). (5.8)
(Н). (5.8)
Вычислим минимально допустимую величину предварительного натяга отключающей пружины
 (5.9)
(5.9)
Выберем βо=0.5. Аналогично параметру βб определим величину предварительного натяга отключающей пружины λо0
![]() (мм). (5.10)
(мм). (5.10)
Находим максимальное и минимально допустимое значение для жесткости отключающей пружины Сот, Н/м:
 , (5.11)
, (5.11)
![]() . (5.12)
. (5.12)
Подставим в (5.11) и (5.12) численные значения:
 (Н/м), (5.13)
(Н/м), (5.13)
 (Н/м). (5.14)
(Н/м). (5.14)
Примем Сот=10000 Н/м.
Тогда жесткость буферной пружины Сб, определяется из условия
 , (5.15)
, (5.15)
![]()
Сб=64890 Н/м.
Примем Сб=65000 Н/м.
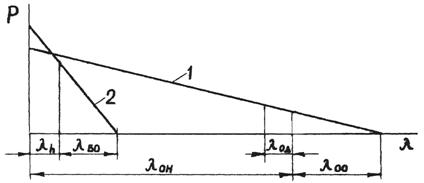
На рисунке 5.2 изображены зависимости усилий, развиваемых отключающей и буферной пружинами, от вертикальной проекции λ перемещения точки М коромысла (рис. 5.1), приближенно совпадающей с изменением длины пружин.
| |
![]()
![]()
![]()
![]()
|
Рисунок 5.2. Характеристики отключающей (1) и буферной (2) пружин: λk – ход отключающей и буферной пружин, соответствующий ходу стержней в контактах; λод – ход отключающей пружины, соответствующий рабочему ходу штока демпфера; λон – деформация отключающей пружины, соответствующая полному ходу контактных стержней Н. отсчет координаты λ ведется от верхнего положения точки К.
Похожие работы
... BК £ Iтерм2 ×tтерм Выбор разъединителей. Разъединители используют для включения и отключения обесточенных участков электрической цепи под напряжением. Выбор разъединителей производится по тем же параметрам что и выключатели, кроме условия по отключающей способности. [3] В соответствии с перечисленными условиями (1.1 - 1.5) выбираем на стороне 10 кВ разъединитель РЛНД - 10/200 ...
... ОПН. ОПН устанавливается вместо РВ на опорах ВЛ в местах с ослабленной изоляцией, в начале и конце защищенного подхода перед подстанцией на опорах вокруг пересечений ВЛ, на длинных переходах ВЛ и т.д. На первый взгляд применение ОПН представляется простым и эффективным решением задачи по ограничению перенапряжений. Исключение из ограничителя коммутирующих искровых промежутков повышает надежность ...
... либо полным, активным или реактивным током. Расчет нагрузок городской сети включает определение нагрузок отдельных потребителей (жилих домов, общественных зданий, коммунально-бытовых предприятий и т.д.) и элементов системы электроснабжения (распределительных линий, ТП, РП, центров питания и т.д.) Расчётную нагрузку грепповых сетей освещения общедомовых помещений жилых зданий (лестничных клеток, ...
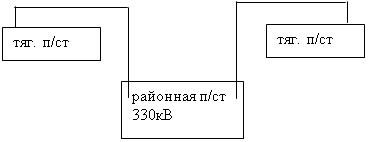
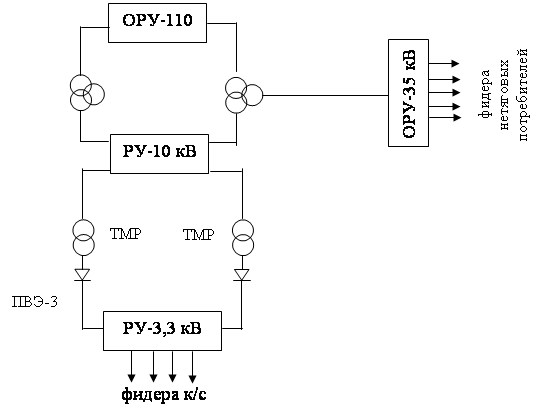
... аварийного режима к.з. 1.2 Структурная схема тяговой подстанции Долбина В данном дипломном проекте предлагается рассмотреть модернизацию тяговой промежуточной подстанции с питающим напряжением 110 кВ. В Белгородской дистанции электроснабжения имеется 9 тяговых подстанций постоянного тока, 8 из которых питаются от ЛЭП-110 кВ, в том числе и тяговая подстанция «Долбина». Тяговая подстанция ...
0 комментариев