Навигация
Построение графика работ сил полезного сопротивления и сил движущих
23555
знаков
8
таблиц
1
изображение
1.3.2. Построение графика работ сил полезного сопротивления и сил движущих
Для построения графика работ сил полезного сопротивления проводим интегрирование зависимости Мпр=Мпр(j) по обобщенной координате (т.е. по углу поворота звена приведения - кривошипа), что приводит к получению требуемого графика Ас=Ас(j). Для получения наглядного результата применим метод графического интегрирования. Для этого вводим полюсное расстояние Н=60 (мм) и определяем масштабный коэффициент диаграммы работ.
![]() mА=mм×mj×Н (1.15)
mА=mм×mj×Н (1.15)
![]() mА=9.5×0,035×60=19.95(Дж)
mА=9.5×0,035×60=19.95(Дж)
![]() Построение этого графика возможно из-за того, что за цикл движения Ад=Ас. Внутри цикла Ад¹Ас, а разность Ад – Ас=DТ – приращению кинетической энергии. Данный график строим в масштабе mт=mА.
Построение этого графика возможно из-за того, что за цикл движения Ад=Ас. Внутри цикла Ад¹Ас, а разность Ад – Ас=DТ – приращению кинетической энергии. Данный график строим в масштабе mт=mА.
Построение графика разности работ DТ поводи следующим образом. Алгебраически складывая положительные ординаты диаграммы Ад=Ад(j) и отрицательные Ас=Ас(j) получим отрезки, которые откладываем от оси абсцис соблюдая знаки. Соединив линиями полученные точки, получим график разности работ DТ.
1.3.3.Расчёт и построение графика приведённого момента инерции рычажного механизма
Для построения требуемого графика нам понадобятся значения масс звеньев и моментов инерции звеньев относительно центров масс, которые нам заданы в ТЗ на проектирование.
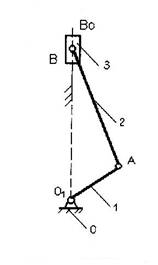
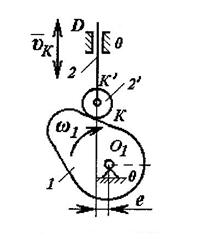
По схеме механизма с учётом формы движения звеньев и на основании того, что кинетическая энергия звена приведения (кривошипа) равна суме кинетических энергий звеньев, запишем формулу.
 (1.16)
(1.16)
где: I1 – момент инерции первого звена.
I1=0.02(кг×м2);
IS2 – момент инерции второго звена;
IS2=0,041(кг×м2);
I3 – момент инерции третьего звена;
I3=0,0016(кг×м2);
IS4 – момент инерции четвёртого звена;
IS4= 0,026(кг×м2);
m2 – масса второго звена.
m2 = 0.39(кг):
m3 – масса третьего звена.
m3 = 0.1(кг):
m4 – масса четвёртого звена.
m4 =0.4(кг);
m5 – масса пятого звена.
m5 =1.05(кг);
VS2 – скорость центра тяжести второго звена.
VS4 – скорость центра тяжести четвёртого звена.
w2 w4 – угловые скорости звеньев 3 и 4 соответственно.
Длины вектора скорости pf.
![]() (1.16)
(1.16)
![]() (1.17)
(1.17)
![]() (1.18)
(1.18)
где: ps2 – аналог скорости точки S2.
ps4 – аналог скорости точки S4.
pс – аналог скорости точки С.
mV – масштабный коэффициент плана скоростей.
![]() (1.19)
(1.19)
![]()
Тогда

![]()
![]()
Полученные значения приведённого момента инерции заносим в таблицу 5, и соответственно им строим график приведённого момента инерции рычажного механизма масштабе.
![]() (1.22)
(1.22)
Положение механизма | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| Iпр | 0.08 | 0.09 | 0.13 | 0.21 | 0.31 | 0.19 | 0.02 | 0.23 | 0.24 | 0.16 | 0.1 |
Таблица 5. Значения приведённого момента инерции
![]()
Похожие работы
... По формуле 106 определяем уравновешивающий момент, Нм: МУР=4670,30,064=298,9 Нм Сравним полученные обоими методами уравновешивающие моменты, %: , (108) 7. Определение коэффициента полезного действия машинного агрегата Машинный агрегат состоит из ДВС, зубчатого редуктора и генератора электрического тока, соединенных последовательно. ДВС состоит из кривошипно-ползунного механизма и ...
... . Расхождение между полученным по графику и рассчитанным в тепловом расчете значениями : ; <. 5 Расчет деталей на прочность 5.1 Поршень Таблица 5.1― Размеры элементов поршневой группы Элементы поршневой группы Расчетные зависимости для карбюраторного двигателя Значения размеров, мм Высота поршня 1,05∙D 104 Расстояние от верхней ...
... 85 231,9 149,4 19,7 10 6018 83,4 248,4 132,4 20,7 11 6600 77,5 269 112,2 20,8 По полученным значениям производим построение внешней скоростной характеристики. 3 Динамический расчет КШМ двигателя 3.1 Расчет сил давления газов Сила давления газов, Н: (3.1) где – атмосферное давление, МПа; , – абсолютное и избыточное давление газов над поршнем в рассматриваемый ...
... двигателя Динамический расчет кривошипно-шатунного механизма выполняется с целью определения суммарных сил и моментов, возникающих от давления газов и от сил инерции. Результаты динамического расчета используются при расчете деталей двигателя на прочность и износ. В течение каждого рабочего цикла силы, действующие в кривошипно-шатунном механизме, непрерывно изменяются по величине и направлению. ...
0 комментариев