Расчёт амплитуды и частоты периодических режимов графоаналитическим методом гармонического баланса
Применение численных методов решения системы двух алгебраических уравнений
Цифровое моделирование системы и получение временной диаграммы ее переходного процесса на ЭВМ. Построение проекции фазовой траектории
Навигация
Расчет симметричных автоколебаний нелинейной САР
Расчет симметричных автоколебаний нелинейной САР
16974
знака
5
таблиц
43
изображения
Государственный комитет
Общественного и профессионального образования
НЭ: Зона нечувствительности с ограничением. Схема модели НЭ:
ПЛАН КУРСОВОЙ РАБОТЫ ПО ТАУ
Содержание
ЮЖНО-РОССИЙСКИЙ ГОСУДАРСТВЕННЫЙ
ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ (НПИ)
Институт ИИТиУ
Кафедра АИТ
Специальность УиИТС
Курсовая работа
по дисциплине “теория автоматического управления”
на тему “Расчет симметричных автоколебаний нелинейной САР”.
Выполнил студент группы 4-1 Ярочкина Н.В.
Принял Савин М.М.
“___”_________2006г.
С оценкой __________________
Новочеркасск 2006
Вариант задания С-49
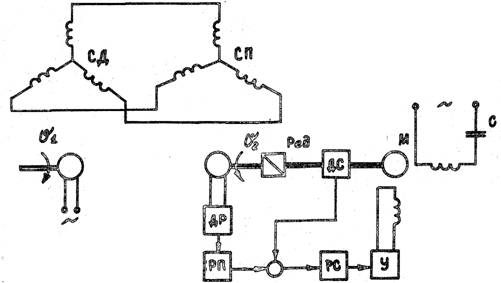
В данной курсовой работе исследуется следящая система отработки угловых перемещений с местной обратной связью по скорости двигателя.
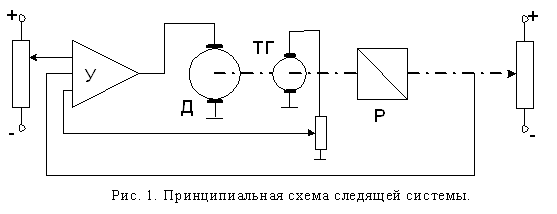

Рис. 2. Структурная схема
Параметры системы:
Ty=0.05; TД=0.1
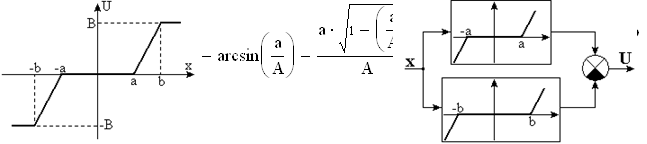 |
НЭ: Зона нечувствительности с ограничением. Схема модели НЭ:
![]()
Кn=В/ba
a=0.3; b=1.1; B=10, Кn=30.303
Варьируемым параметром является время τ постоянного запаздывания усилителя У при Кос=0. Диапазон варьирования 0≤τ≤τmax. Причем в начале расчета при τгр=0 определить Кгр и ωπ. Затем из условия единственности решения найти τmax=2π/ ωπ, и считать К≤ Кгр=const при изменении τ.
ПЛАН КУРСОВОЙ РАБОТЫ ПО ТАУ
«Расчёт симметричных автоколебаний нелинейной САР»
1. Рассчитать амплитуды А и частоты w периодических режимов в САР при различных значениях варьируемого параметра графоаналитическим методом гармонического баланса, исследовать устойчивость этих режимов и определить, какие из них являются автоколебаниями. При построении годографов применять ППП. Привести листинги ввода исходных данных и расчёта. Оцифровать графики значениями параметров w и А, указать масштабы на осях.
2. Рассчитать на ЭВМ численным методом решения уравнений гармонического баланса те же величины, что и п.1, а также граничное значение варьируемого параметра, при котором автоколебания находятся на границе своего возникновения и исчезновения. Построит зависимости параметров автоколебаний от значений варьируемого параметра. Привести листинги исходных данных и расчёта.
3. Выполнить с помощью ППП цифровое моделирование системы при значения варьируемого параметра больших и меньших граничного. Получить при этом временную диаграмму переходного процесса и соответствующую ей проекцию фазовой траектории в плоскости «величина-скорость». Привести схему моделирования, таблицы ввода структуры и параметров, распечатки диаграмм процессов во временной и фазовой областях.
4. Сделать выводы по работе, охарактеризовав процессы в САР, влияние варьируемого параметра, степень совпадения результатов расчета и моделирования и т.п.
Содержание
Введение
1. Расчет первоначальных параметров ![]()
2. Расчет амплитуды и частоты периодических режимов графоаналитическим
методом гармонического баланса
2.1. Применение численных методов решения системы двух
алгебраических уравнений
3.Цифровое моделирование системы и получение временной диаграммы ее переходного процесса на ЭВМ. Построение проекции фазовой траектории
4. Выводы по работе
Список литературы
ВВЕДЕНИЕ
Предметом изучения теории автоматического управления являются линейные и нелинейные системы автоматического регулирования и управления, представленные своими математическими моделями.
Цель данной курсовой работы заключается в расчёте параметров автоколебаний в нелинейной следящей системе.
Следящими называются такие системы управления, в которых происходит слежение за некоторой измеряемой величиной. Закон изменения её заранее неизвестен, а управляемая величина должна с заданной точностью воспроизводить измеряемую величину или некоторую функцию измеряемой величины.
Автоколебания, явление присущее только нелинейным системам. Автоколебания – установившейся устойчивый режим периодических колебаний во времени всех величин нелинейной системы. Для некоторых систем автоколебания являются рабочим режимом, для некоторых они недопустимы.
Симметричными автоколебаниями называются автоколебания, если их положительный полупериод симметричен отрицательному относительно оси времени.
Бывают случаи, когда автоколебания являются полезным явлением. Но также бывают и обратные, когда автоколебания желательно исключить. Наличие или отсутствие автоколебаний можно регулировать несколькими способами. Например, с помощью параметров самой системы (коэффициентов передачи), что и делается в данной работе, либо с помощью применения корректирующих цепей. Корректирующие цепи позволяют резко понизить амплитуду автоколебаний и поднять частоту или вовсе подавить их при малой зоне нечувствительности релейной характеристики.
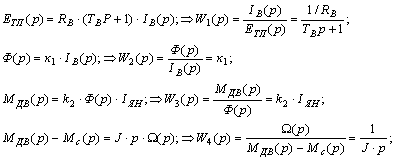
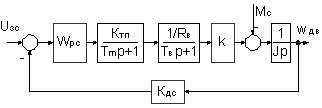
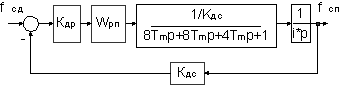
1. Расчет ![]()
В начале расчета необходимо преобразовать исходную структурную схему с учетом задания. После преобразования получим расчетную схему (рис. 3), которая будет содержать последовательно соединенные линейную часть (ЛЧ) и нелинейный элемент (НЭ). Линейная часть представляет собой преобразованные в единый блок линейные элементы. Определим Кгр и ωπ при τгр=0, затем из условия единственности решения найдем τmax=2π/ ωπ.
Рис. 3.

Примем k1k2=К
Минимальное значение коэффициента усиления К линейной части САУ, при котором автоколебания находятся на границе своего возникновения и исчезновения (полуустойчивы), называется граничным коэффициентом Кгр.
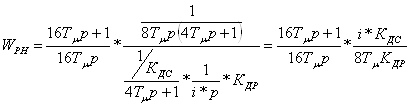
Для нахождения частоты w и Кгр запишем уравнение гармонического баланса
![]() (1.1)
(1.1)
и, выделим в нем слева от знака равенства вещественную X(A,w) и мнимую Y(A,w) части:
 (1.2)
(1.2)
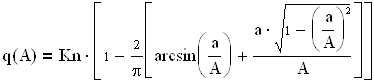
В уравнении (1.1) приняты следующие обозначения: WЛЧ (jw) – частотная передаточная функция ЛЧ системы; WНЭ (A) – комплексный коэффициент передачи гармонически линеаризованного нелинейного элемента (НЭ). Wнэ(А) = q(A).
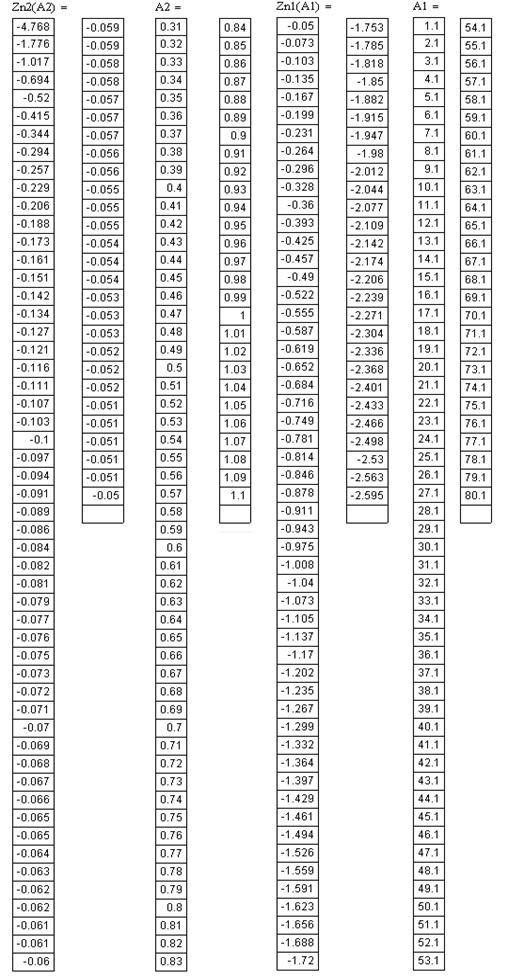
Граничное значение коэффициента усиления Кгр можно определить из системы уравнений (1.2) при значении амплитуды А, соответствующей наименьшему значению модуля функции ZНЭ(A) = -1/ WНЭ(A). Построим график функции ZНЭ(A) и найдем амплитуду А, используя программу Mathcad 2001.
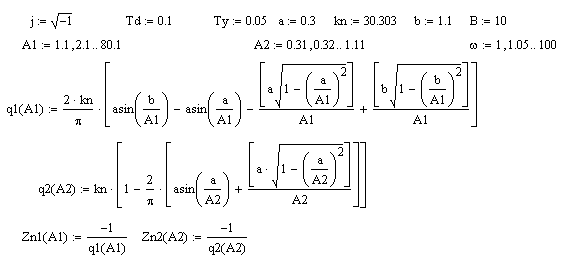
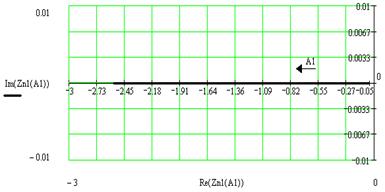

Рис. 4. Графики зависимости Z2НЭ(A2) при a≤А2≤b и Z1НЭ(A1) при А1≥b
Исследуя вышеприведенные графики и значения, полученные в результате расчета Z2НЭ и Z1НЭ,зависящих от A2 и A1 соответственно (Таблица 1.) приходим к выводу, что наименьшему значению модуля функции ZНЭ(A) = -1/ WНЭ(A) соответствует амплитуда A=b=1.1
Найдем значение Wнэ(А) = q(A) при А=1.1:

Теперь из системы уравнений (1.2) найдем граничное значение коэффициента усиления Кгр и частоту ωπ
Начальные условия:
![]()
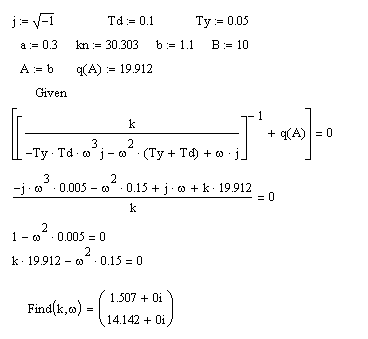
Согласно выше приведенным расчетам Кгр = 1.507, в соответствии с условием, что ![]() , в дальнейшем будем рассматривать К вместо произведения k1k2 и брать равным 1.45.
, в дальнейшем будем рассматривать К вместо произведения k1k2 и брать равным 1.45.
Найдем τmax (с)
Значит, необходимое нам время запаздывания будет варьировать в следующих приделах 0≤τ≤ 0.444.
Таблица 1. Значения Z2НЭ и Z1НЭ,зависящие от A2 и A1 соответственно при a≤А2≤b и А1≥b.
Похожие работы
... имеют отрицательную действительную часть. Поэтому система является устойчивой. 1.7 Исследование установившегося режима САР 1.7.1 Выбор задающих воздействий В следящей системе задающее воздействие заранее не известно—на то она и следящая система. Смотрите ниже по тексту в подразделе Моделирование рабочего режима САР в соответствии с индивидуальным заданием. 1.7.2 Расчет передаточных ...
... тепловой нагрузки. Для перехода на дистанционное управление служит блок 14 (БРУ-У), соединенный через пускатель 75 (ПРБ-74) с двигателем 16 (МЭО 25/100), перемещающим P.O. III. Теплота сгорания топлива контролируется датчиком 17 (КГ-7093.01), корректирующий импульс формируется во вторичном приборе 18 (КГ-7093.02). Коррекция задания при изменении тепловой нагрузки осуществляется с помощью блока ...
0 комментариев