Расчёт амплитуды и частоты периодических режимов графоаналитическим методом гармонического баланса
Применение численных методов решения системы двух алгебраических уравнений
Цифровое моделирование системы и получение временной диаграммы ее переходного процесса на ЭВМ. Построение проекции фазовой траектории
Навигация
Применение численных методов решения системы двух алгебраических уравнений
Расчет симметричных автоколебаний нелинейной САР
16974
знака
5
таблиц
43
изображения
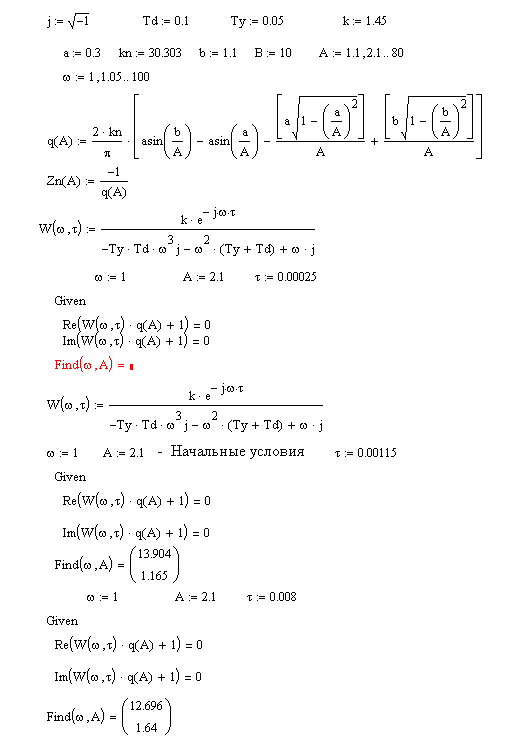
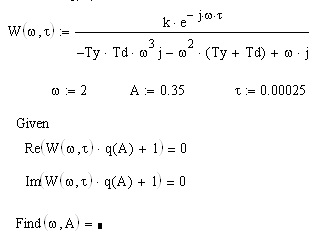
2.1. Применение численных методов решения системы двух алгебраических уравнений.
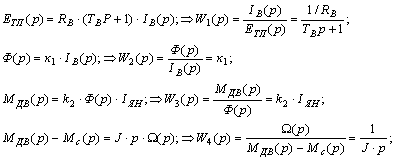
Характеристика НЭ, входящего в заданную нелинейную систему, однозначна (q(A)), поэтому основное уравнение (1) метода гармонической линеаризации распадается на два уравнения:
|
![]() ,
,
![]() ; (6)
; (6)
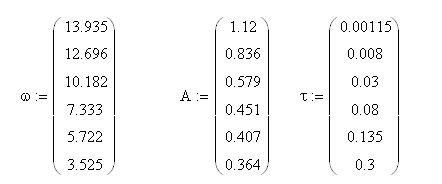
Найдем решение системы уравнений (6) при условии, что А≥b с помощью пакета прикладных программ MathCAD 2001.
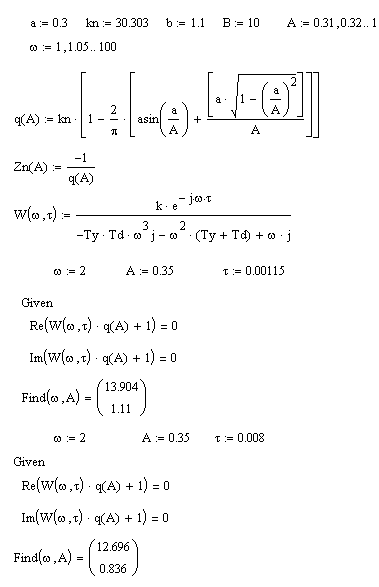
Теперь найдем решение системы уравнений (6) при условии, что a ≤А≤b
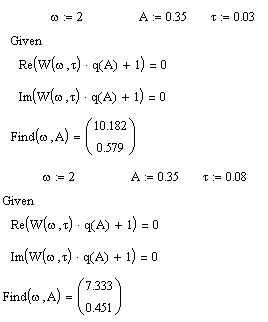
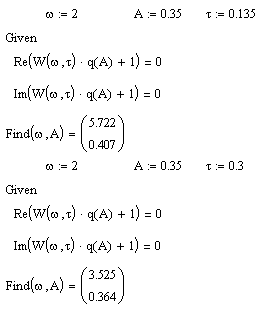
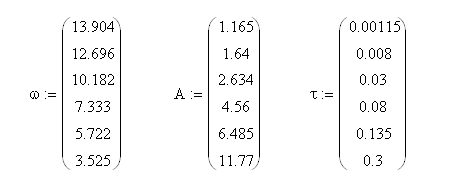
Сведем полученные данные в таблицу 4.
Таблица 4.
| τ | ω | А≥b | a ≤А≤b |
| 0.00025 | -//- | -//- | -//- |
| 0.00115 | 13.904 | 1.165 | 1.12 |
| 0.008 | 12.696 | 1.64 | 0.836 |
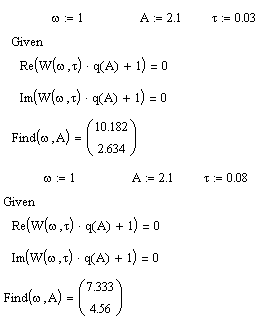
| 0.03 | 10.182 | 2.634 | 0.579 |
| 0.08 | 7.333 | 4.56 | 0.451 |
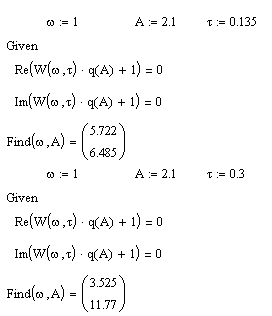
| 0.135 | 5.722 | 6.485 | 0.407 |
| 0.3 | 3.525 | 11.77 | 0.364 |
Сравнив таблицу 4 с таблицами 2 и 3, можно сделать вывод, что погрешность между расчетами графо-аналитическим методом гармонического баланса и расчетами численным методом решения системы двух алгебраических уравнений не велика.
Построим зависимости параметров автоколебаний от варьируемого параметра.
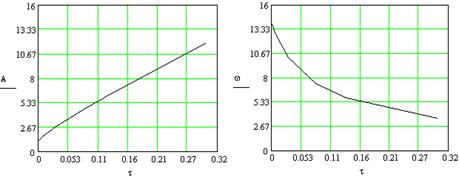
Зависимость амплитуды и частоты от времени запаздывания при условии А≥b:
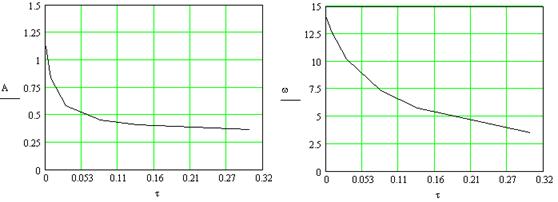
Зависимость амплитуды и частоты от времени запаздывания при условии a ≤А≤b:
Проанализировав зависимость частоты и амплитуды от параметра τ при А≥b не трудно заметить, что при увеличении транспортного запаздывания увеличивается амплитуда автоколебаний и вследствие чего уменьшается их частота.
При условии a ≤А≤b периодический режим неустойчив рассматривать зависимость амплитуды и частоты от параметра τ не имеет смысла.
Похожие работы
... имеют отрицательную действительную часть. Поэтому система является устойчивой. 1.7 Исследование установившегося режима САР 1.7.1 Выбор задающих воздействий В следящей системе задающее воздействие заранее не известно—на то она и следящая система. Смотрите ниже по тексту в подразделе Моделирование рабочего режима САР в соответствии с индивидуальным заданием. 1.7.2 Расчет передаточных ...
... тепловой нагрузки. Для перехода на дистанционное управление служит блок 14 (БРУ-У), соединенный через пускатель 75 (ПРБ-74) с двигателем 16 (МЭО 25/100), перемещающим P.O. III. Теплота сгорания топлива контролируется датчиком 17 (КГ-7093.01), корректирующий импульс формируется во вторичном приборе 18 (КГ-7093.02). Коррекция задания при изменении тепловой нагрузки осуществляется с помощью блока ...
0 комментариев