Расчёт амплитуды и частоты периодических режимов графоаналитическим методом гармонического баланса
Применение численных методов решения системы двух алгебраических уравнений
Цифровое моделирование системы и получение временной диаграммы ее переходного процесса на ЭВМ. Построение проекции фазовой траектории
Навигация
Цифровое моделирование системы и получение временной диаграммы ее переходного процесса на ЭВМ. Построение проекции фазовой траектории
Расчет симметричных автоколебаний нелинейной САР
16974
знака
5
таблиц
43
изображения
3. Цифровое моделирование системы и получение временной диаграммы ее переходного процесса на ЭВМ. Построение проекции фазовой траектории.
Моделирование осуществляем с помощью пакета программы MathLab 6.5.
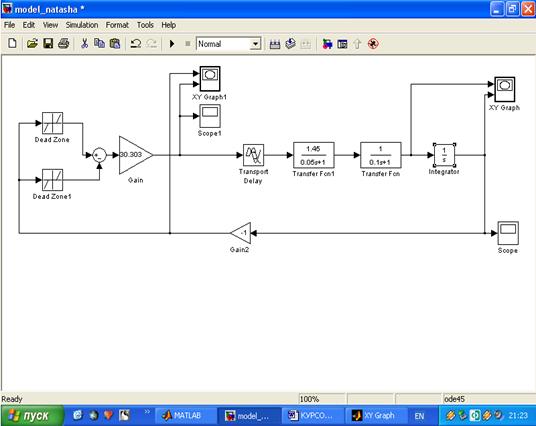
рис.4 Моделирование в программе Simulink
После задания параметров всех элементов схемы строим фазовые портреты и переходные характеристики.
Фазовые траектории и переходные характеристики при τ>τгр :
τ=0.03
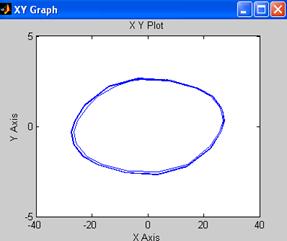
рис.5 фазовая траектория при τ=0.03
Фазовая траектория имеет один устойчивый предельный цикл, что соответствует устойчивому режиму автоколебаний
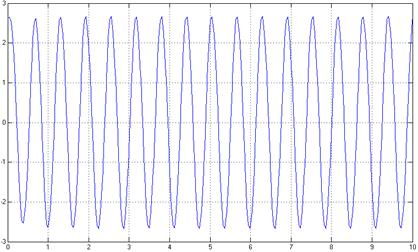
рис. 6 переходная характеристика при τ=0.03
Из графика рассчитаем значение А=2.6; w=2π/Т w=2·3.14/0.65=9.66
При ![]() переходной процесс имеет колебательный характер, при этом устанавливаются автоколебания
переходной процесс имеет колебательный характер, при этом устанавливаются автоколебания
τ=0.3
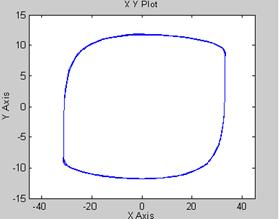
рис.7 фазовая траектория при τ=0.3
Фазовая траектория имеет один устойчивый предельный цикл, что соответствует устойчивому режиму автоколебаний
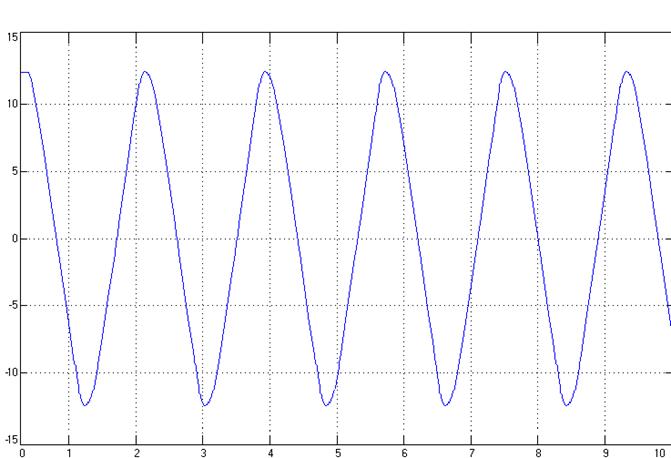
рис. 8 переходная характеристика при τ=0.3
Из графика рассчитаем значение А=12; w=2π/Т w=2·3.14/1.8=3.48
При ![]() переходной процесс имеет колебательный характер, при этом устанавливаются автоколебания.
переходной процесс имеет колебательный характер, при этом устанавливаются автоколебания.
Сравним расчетные значения и значения полученные в результате моделирования:
| τ | А расчетнае | А модел. | w расчетнае | w модел. |
| 0.003 | 2.637 | 2.6 | 10.182 | 9.66 |
| 0.3 | 11.768 | 12 | 3.525 | 3.48 |
Фазовая траектория при ![]() <
< ![]()
τ=0.00025
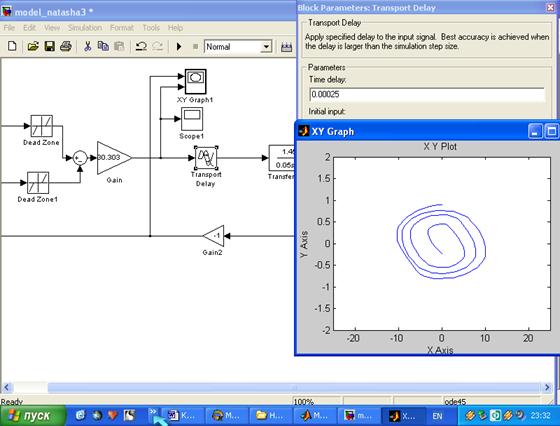
рис.9 фазовая траектория при τ=0.00025
Проекция фазовой траектории на фазовую плоскость Х1 имеет сходящийся характер, что говорит об отсутствии автоколебаний
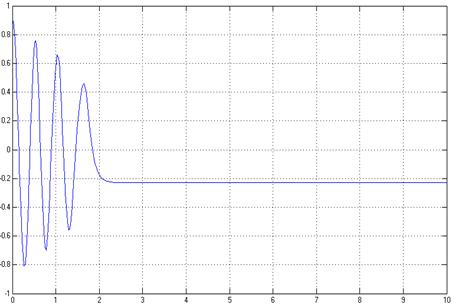
рис. 10 переходная характеристика при τ=0.00025
При ![]() переходной процесс имеет колебательный затухающий характер.
переходной процесс имеет колебательный затухающий характер.
4. Выводы по работе
В работе проведено исследование следящей системы отработки угловых перемещений с местной обратной связью по скорости двигателя. Определен диапазон варьирования параметра 0≤τ≤0.444 и рассчитано значение τгр=0.00115 (при τ = τгр колебания в системе находятся на грани своего возникновения и исчезновения).
Показано, что при значении 0.444>τ>τгр и условии А≥b в системе наблюдается устойчивый периодический режим с определённой амплитудой и частотой. При условии при a ≤А≤b периодический режим неустойчив.
Параметры автоколебаний были найдены вначале приближённым графоаналитическим методом, исходя из точек пересечения годографов WЛЧ(jw) и ZНЭ(A). В следующем пункте эти параметры были уточнены с помощью численного расчёта. Расхождение в числовых выражениях оказалось небольшим (см. таблицы 2,3 и 4).
При τ<τгр наблюдается сходящийся процесс, любое воздействие на систему приводит к затухающим колебаниям, т.е. автоколебания не возможны при любых начальных условиях.
При математическом моделировании системы на ЭВМ были получены переходные характеристики и фазовые траектории системы при разных значениях варьируемого параметра. Эти характеристики дают наглядное представление о качестве регулирования. При этом были также найдены приближенные значения амплитуды и частоты при τ=0.03 и τ=0.3.
Небольшие расхождения между искомыми значениями при использовании графоаналитического метода и цифрового моделирования это объясняется возникновением погрешности в расчетах (погрешность метода, погрешность ЭВМ) а также погрешность построения. При аналитическом расчете использовались итерационные методы решения, которые не гарантируют точного результата за конечное число операций (итераций), т.е. здесь особенно выражена погрешность метода, также есть и погрешность ЭВМ.
Изучив зависимость частоты и амплитуды от параметра τ при А≥b не трудно заметить, что при увеличении транспортного запаздывания (в данной работе мы рассматривали 0.444>τ>τгр) увеличивается амплитуда автоколебаний и вследствие чего уменьшается их частота.
Список литературы.
1. Методические указания к курсовой работе по дисциплине «Теория автоматического управления» – Савин М.М., Пятина О.Н., Елсуков В.С. - НГТУ Новочеркасск 1994 г.
2. Теория автоматического управления: Учеб. для ВУЗов: в 2 ч. /Под ред.
А.В. Нетушила. М.:Высш.шк., 1983. Ч.2.432 с.
3. Теория автоматического управления» – Савин М.М., Елсуков В.С., Пятина О.Н.,. - Новочеркасск 2005 г.
Похожие работы
... имеют отрицательную действительную часть. Поэтому система является устойчивой. 1.7 Исследование установившегося режима САР 1.7.1 Выбор задающих воздействий В следящей системе задающее воздействие заранее не известно—на то она и следящая система. Смотрите ниже по тексту в подразделе Моделирование рабочего режима САР в соответствии с индивидуальным заданием. 1.7.2 Расчет передаточных ...
... тепловой нагрузки. Для перехода на дистанционное управление служит блок 14 (БРУ-У), соединенный через пускатель 75 (ПРБ-74) с двигателем 16 (МЭО 25/100), перемещающим P.O. III. Теплота сгорания топлива контролируется датчиком 17 (КГ-7093.01), корректирующий импульс формируется во вторичном приборе 18 (КГ-7093.02). Коррекция задания при изменении тепловой нагрузки осуществляется с помощью блока ...
0 комментариев