Навигация
Применение спектрального метода для решения обратных задач динами
31691
знак
0
таблиц
25
изображений
3. Применение спектрального метода для решения обратных задач динами
Рассмотрим решение спектральным методом обратной задачи динамики в следующей постановке.
Известна система автоматического управления (регулирования), которая может быть как стационарной, так и нестационарной, и работа которой описывается следующим дифференциальным уравнением:
![]() (2.1)
(2.1)
где
![]() - сигнал на выходе системы;
- сигнал на выходе системы;
![]() - сигнал на входе системы;
- сигнал на входе системы;
![]() - коэффициенты дифференциального уравнения, являющиеся функциями времени.
- коэффициенты дифференциального уравнения, являющиеся функциями времени.
При этом неизвестны некоторые параметры настройки системы управления, которые необходимо определить в процессе решения задачи. Обозначим множество этих параметров через ![]() где
где ![]() - их число. Тогда коэффициенты дифференциального уравнения будут зависеть от
- их число. Тогда коэффициенты дифференциального уравнения будут зависеть от ![]() и, следовательно можно записать;
и, следовательно можно записать;
 (2.2)
(2.2)
Задан эталонный сигнал ![]() на интервале
на интервале ![]() или его спектральная характеристика, который необходимо получить на выходе системы (2.2). В общем случае могут быть заданы ненулевые начальные условия:
или его спектральная характеристика, который необходимо получить на выходе системы (2.2). В общем случае могут быть заданы ненулевые начальные условия:
![]() (2.3)
(2.3)
Для заданных дифференциального уравнения (2.2), эталонного выходного сигнала ![]() и начальных условий (2.3) необходимо определить входной сигнал
и начальных условий (2.3) необходимо определить входной сигнал ![]() и искомые сигнала на выходе получили бы сигнал, максимально параметры настройки
и искомые сигнала на выходе получили бы сигнал, максимально параметры настройки ![]() такими, что при подачи на вход системы автоматического управления найденного входного в известном смысле приближенный к эталонному.
такими, что при подачи на вход системы автоматического управления найденного входного в известном смысле приближенный к эталонному.
В качестве меры близости реального сигнала на выходе системы (2.2), (2.3) к эталонному сигналу ![]() на интервале
на интервале ![]() примем следующий функционал
примем следующий функционал
 (2.4)
(2.4)
Неизвестный входной сигнал будем искать в форме его спектрального разложения в ряд по некоторому базису ортонормированных функций ![]() ;
;
![]()
где коэффициенты ![]() , неизвестны и их необходимо определить.
, неизвестны и их необходимо определить.
Следовательно входной сигнал будет зависеть от времени ![]() и от множества параметров
и от множества параметров ![]() Тогда дифференциальное уравнение (2.2) можно записать в следующей виде
Тогда дифференциальное уравнение (2.2) можно записать в следующей виде
 (2.5)
(2.5)
Интегрируя уравнение ![]() раз с учетом начальных условий, получим
раз с учетом начальных условий, получим
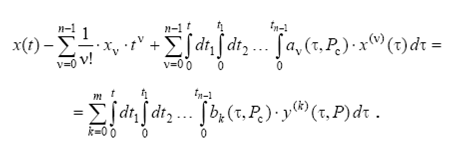 (2.6)
(2.6)
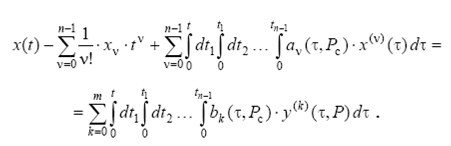
Воспользовавшись справедливым для любой непрерывной функции тождеством

равенство (2.6) можно переписать в виде
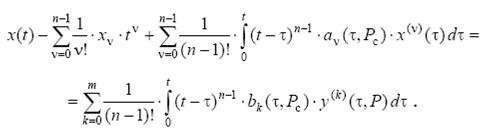 (2.7)
(2.7)
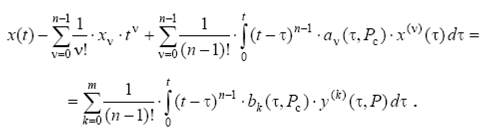
Интегрируя полученное равенство (2.7) по частям и применяя формулы
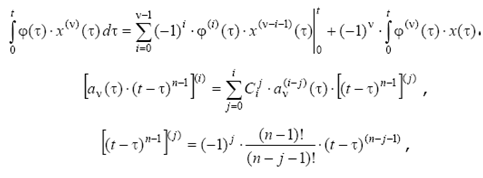
получим
 (2.8)
(2.8)
где
Уравнение (2.8) представляет собой уравнение Вольтера 2-го рода. Преобразуем его к интегральному уравнению Фредгольма 2-го рода на интервале исследования ![]() :
:
 (2.9)
(2.9)
где
Таким образом, получены две эквивалентные формы описания системы: дифференциальное уравнение (2.2) с начальными условиями (2.3) и интегральное уравнение (2.9). Функция ![]() в выражении (2.9) представляет собой полином, коэффициенты которого зависят от начальных условий (2.3) и от множества
в выражении (2.9) представляет собой полином, коэффициенты которого зависят от начальных условий (2.3) и от множества ![]() искомых параметров настройки системы автоматического управления (регулирования). Перепишем
искомых параметров настройки системы автоматического управления (регулирования). Перепишем ![]() , изменив порядок суммирования
, изменив порядок суммирования
Введем следующие обозначения:
Тогда полином ![]() можно записать следующим образом
можно записать следующим образом

где ![]() - вектор-столбец начальных условий;
- вектор-столбец начальных условий; ![]() - вектор-столбец полиномов
- вектор-столбец полиномов ![]() .
.
Рассмотрим левую часть уравнения (2.9). Представим функции, входящие в нее, в виде разложений в ряд по ортонормированному базису ![]() .
.
Имеем
![]() , (2.10)
, (2.10)
где ![]() - спектральная характеристика выходного сигнала
- спектральная характеристика выходного сигнала ![]() , элементы которой определяются из соотношения
, элементы которой определяются из соотношения
![]() (2.11)
(2.11)
где ![]()
![]() - квадратная матрица размерностью
- квадратная матрица размерностью ![]() , элементы которой определяются из выражения
, элементы которой определяются из выражения

Подставив полученные разложения (2.10) и (2.11) в левую часть уравнения (2.9) и учитывая, что  , где
, где ![]() - единичная, в силу ортонормированности базисных функций, получим
- единичная, в силу ортонормированности базисных функций, получим
![]() (2.12)
(2.12)
где ![]() - матрица спектральной характеристики инерционной части системы размерностью
- матрица спектральной характеристики инерционной части системы размерностью ![]() .
.
Сделаем аналогичные преобразования для правой части уравнения (2.9).
![]() , (2.13)
, (2.13)
где ![]() - спектральная характеристика сигнала на входе системы, элементы которой определяются из соотношения
- спектральная характеристика сигнала на входе системы, элементы которой определяются из соотношения
 (2.14)
(2.14)
где ![]() - квадратная матрица размерностью
- квадратная матрица размерностью ![]() спектральной характеристики форсирующей части системы, элементы которой определяются из выражения
спектральной характеристики форсирующей части системы, элементы которой определяются из выражения
 (2.15)
(2.15)
где ![]() - матрица размерностью
- матрица размерностью ![]() элементы которой определяются из соотношения
элементы которой определяются из соотношения

Подставляя разложения (2.13), (2.14) и (2.15) в (2.9) и делая соответствующие преобразования, получим

 (2.16)
(2.16)
Таким образом, уравнение (2.9) с учетом (2.12) и (2.16) можно переписать в следующем виде
![]() (2.17)
(2.17)
Рассмотрим теперь функционал (2.4). Имеем
Так как  , то последние выражение можно записать в следующем виде
, то последние выражение можно записать в следующем виде
 (2.18)
(2.18)
или

где
![]() . (2.19)
. (2.19)
Здесь спектральная характеристика эталонного сигнала ![]() или задана или, в случае задании эталонного сигнала
или задана или, в случае задании эталонного сигнала ![]() , определяется из выражения
, определяется из выражения
 ,
, ![]() .
.
Таким образом, задача определения входного сигнала ![]() (точнее множества
(точнее множества ![]() ) и множества
) и множества ![]() неизвестных параметров настройки системы управления (2.2), (2.3) сводиться к задаче безусловной минимизации функционала (2.18) по элементам множеств
неизвестных параметров настройки системы управления (2.2), (2.3) сводиться к задаче безусловной минимизации функционала (2.18) по элементам множеств ![]() и
и ![]() , т.е.
, т.е.
![]() .
.
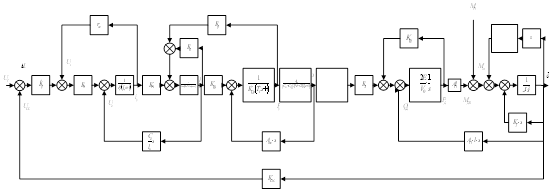
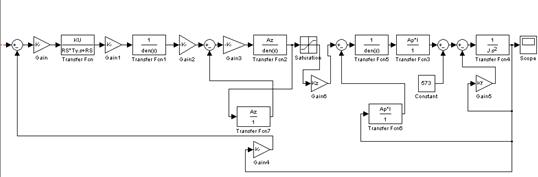
На рисунке 2.1 представлена структурная схема алгоритма решения поставленной задачи.
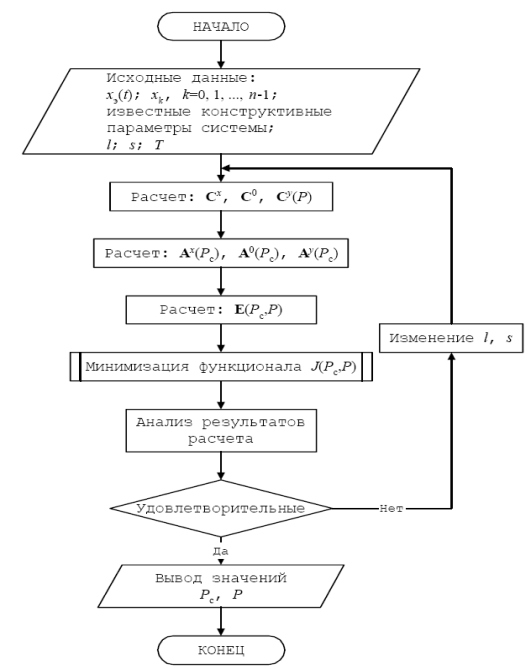
Рис 2.1 Структурная схема алгоритма решения обратной задачи динамики спектральным методом
Похожие работы
... задачи динамики, определять, при каких условиях осуществимо движение с заданными свойствами. С другой стороны, и само развитие теории управления движениями материальных систем вызвало необходимость решения обратных задач динамики в различных постановках. Все это привело к тому, что обратные задачи классической механики оказались своего рода направляющими и исходными задачами современной науки об ...

... относительности (теории тяготения). Исходя из изложенного, в механике пользуются единым термином «масса», определяя массу как меру инертности тела и его гравитационных свойств. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ ТОЧКИ. РЕШЕНИЕ ЗАДАЧ ДИНАМИКИ ТОЧКИ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ МАТЕРИАЛЬНОЙ ТОЧКИ Для решения задач динамики точки будем пользоваться одной из следующих двух систем уравнений ...
... закономерностям, независимо от наших знаний о природе явлений. Всякое следствие имеет свою причину. Как и все остальное в физике, понятие детерминизма менялось по мере развития физики и всего естествознания. В 19-м веке теория Ньютона окончательно оформилась и установилась. Существенный вклад в ее становление внес П.С.Лаплас (1749 - 1827). Он был автором классических трудов по небесной механике и ...
... . 5. Получены длительные непрерывные ряды наблюдений интенсивности потока и азимутальных распределений СДВ атмосфериков, которые позволили проследить динамику грозовой активности в мировых грозовых центрах. 5.1. Морской мониторинг показал, что основной вклад в мировую грозовую активность дают континентальные и островные грозовые центры. Вариации интенсивности потока импульсов хорошо ...
0 комментариев