Навигация
4. Практическая часть
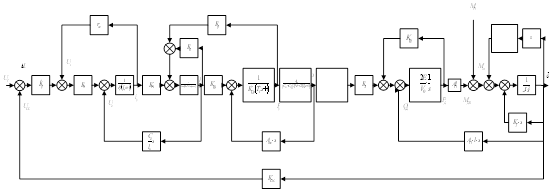
Рассмотрим отдельный блок системы самонаведения, структурная схема которого представлена на рисунке 1.
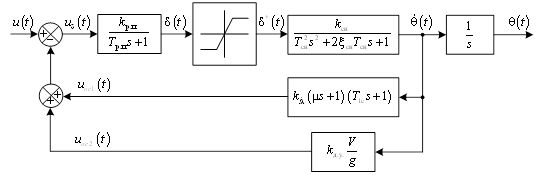
Рис. 1. Структурная схема системы
Задан эталонный закон изменения угла ![]() , график которого представлен на рисунке 2.
, график которого представлен на рисунке 2.
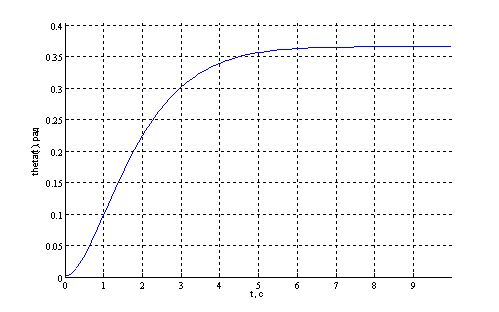
Рис. 2. График эталонного закона изменения угла ![]()
Задача формулируется следующим образом. Необходимо найти управление ![]() такое, которое обеспечит на выходе сигнал
такое, которое обеспечит на выходе сигнал ![]() , максимально близкий к заданному эталонному закону.
, максимально близкий к заданному эталонному закону.
5. Практическая часть
Данная задача относится к разряду неккоректных и мы будем решать её с применением оптимизационных методов.
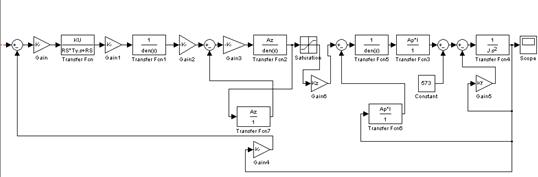
Для решения данной задачи воспользуемся методом матричных операторов. В этом случае структурную схему можно представить в следующем виде (рис. 3).
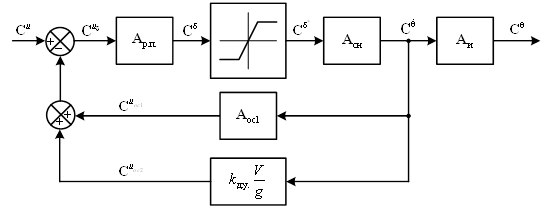
Рис. 3. Структурная схема системы в операторной форме
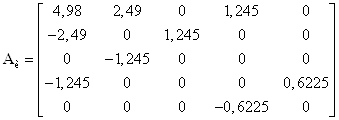
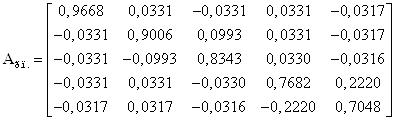
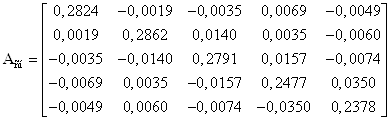
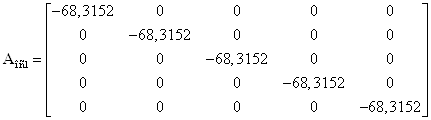
В качестве ортонормированной системы использовалась система функций Уолша с удержанием ![]() элементов. В этом случае матричные операторы основных элементов системы будут следующими (представлены подматрицы размерностью
элементов. В этом случае матричные операторы основных элементов системы будут следующими (представлены подматрицы размерностью ![]() ):
):
 ;
;
 ;
;
 ;
;
 .
.
Спектральная характеристика сигнала ![]() следующая (представлены первые пять элементов):
следующая (представлены первые пять элементов):
![]() .
.
Решение поставленной задачи будем выполнять в следующие два этапа.
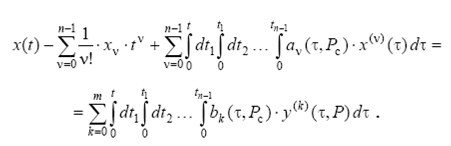
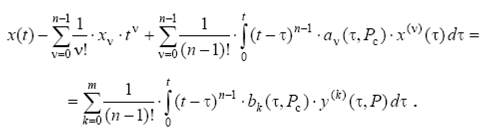
1. Поскольку известен эталонный выходной сигнал, то из уравнения
![]() (1)
(1)
можно найти спектральную характеристику эталонного сигнала на выходе нелинейного элемента. Решая уравнение (1) относительно коэффициентов ![]() с использованием метода Гаусса-Ньютона получены следующие числовые значения коэффициентов:
с использованием метода Гаусса-Ньютона получены следующие числовые значения коэффициентов:
![]() . (2)
. (2)
График соответствующего сигнала представлен на рисунке 4.
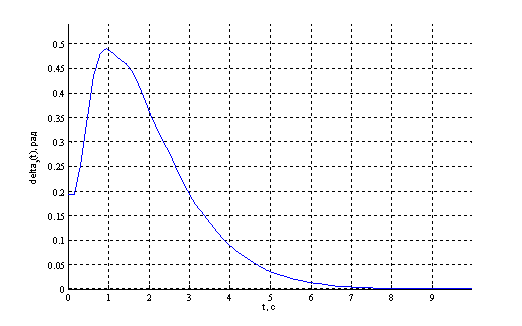
Рис. 4. График сигнала, который необходимо получить на выходе нелинейного элемента
Однако на выходе нелинейного элемента можно получить сигнал, представленный на рисунке 5 (ниже показаны первые пять элементов спектральной характеристики).
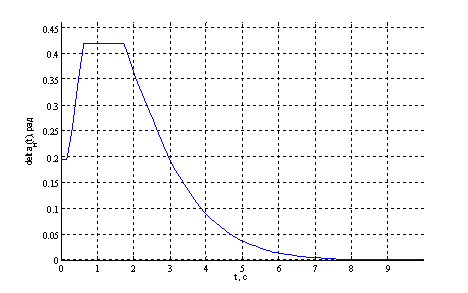
Рис. 5. Реальный сигнал на выходе нелинейного элемента
![]() .
.
Тогда из (1) находим эталонный сигнал на выходе, который может обеспечить данная система (рис. 6). Его спектральная характеристика:
![]() . (3)
. (3)
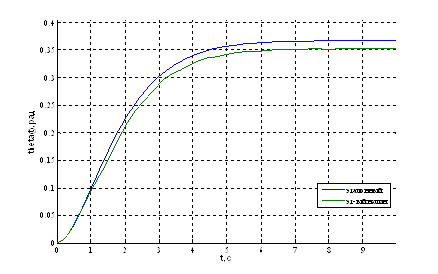
Рис. 6. Графики требуемого эталонного сигнала и эталонного сигнала, который можно получить
2. В результате решения предыдущего этапа найдены спектральные характеристики (3) эталонного выходного сигнала, который может обеспечить данная система, и (2) эталонного сигнала, которой необходимо получить на входе нелинейного элемента.
Далее искомый сигнал ![]() представим в виде
представим в виде
![]() , (4)
, (4)
где ![]() некоторая система линейно независимых функций.
некоторая система линейно независимых функций.
В результате можно для спектральной характеристики сигнала на входе нелинейного элемента записать следующую зависимость.
![]() , (5)
, (5)
где ![]() – спектральная характеристика
– спектральная характеристика ![]() -го элемента системы
-го элемента системы ![]() . Поскольку известны спектральные характеристики эталонных сигналов
. Поскольку известны спектральные характеристики эталонных сигналов ![]() и
и ![]() , то между левой и правой частями выражения (5) будет иметь место невязка
, то между левой и правой частями выражения (5) будет иметь место невязка
![]() , (6)
, (6)
зависящая от неизвестных коэффициентов ![]() ,
, ![]() . Сформировав функционал
. Сформировав функционал
![]() , (7)
, (7)
исходную задачу синтеза входного сигнала можно свести к задаче поиска минимума функционала (7) на множестве допустимых значений коэффициентов ![]() ,
, ![]() , т.е.
, т.е.
![]() .
.
При решении задачи в качестве системы функций ![]() использовались экспоненциальные функции:
использовались экспоненциальные функции: ![]() . Минимум функционала (7) искался с использование алгоритма Нелдера-Мида (алгоритма безусловной минимизации). В качестве начальных значений искомых коэффициентов были приняты нулевые. При этом значение функционала (7):
. Минимум функционала (7) искался с использование алгоритма Нелдера-Мида (алгоритма безусловной минимизации). В качестве начальных значений искомых коэффициентов были приняты нулевые. При этом значение функционала (7):
![]() .
.
Были получены следующие оптимальные значения искомых коэффициентов:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Значение функционала (7) в оптимальной точке:
![]() .
.
Следовательно, входной сигнал имеет следующий вид:
![]()
![]()
![]() .
.
На рисунке 7 представлен график сигнала ![]() .
.
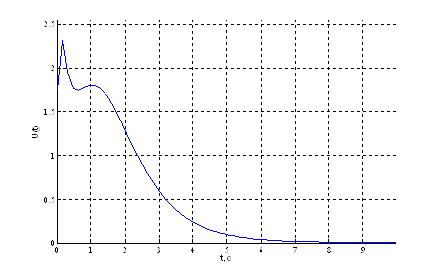
Рис. 7. График синтезируемого входного сигнала ![]()
На рисунке 8 представлены результаты анализа системы с использованием метода Рунге-Кутта для найденного входного сигнала и для сравнения приведены графики требуемого эталонного выходного сигнала и эталонного сигнала, который может обеспечить данная система.
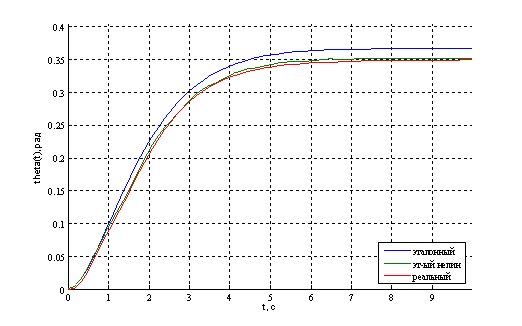
Рис. 8. Графики выходных сигналов системы
Таким образом, можно построить следующий алгоритм решения задачи синтеза входного сигнала нелинейной системы:
1) задается эталонный выходной сигнал;
2) из (1) находится сигнал на выходе нелинейного элемента, который на выходе системы обеспечивает требуемый эталонный процесс;
3) найденный в предыдущем пункте сигнал представляется как сигнал на входе нелинейного элемента и находится реальный сигнал на выходе нелинейного элемента и уточняется эталонный сигнал на выходе системы;
4) поскольку известны сигналы на входе нелинейного элемента и на выходе системы, то, представив искомый входной сигнал в виде (4), строится невязка (6) и функционал (7);
5) минимизируя полученный функционал, находятся числовые значения искомых коэффициентов ![]() ,
, ![]() ;
;
6) проводится анализ полученных результатов.
5. Результаты расчёта
1. Эталонный закон изменения угла teta(t)
Число точек квантования по времени: Nt = 499;
Шаг квантования: h_t = 0.020000 c;
Время поражения цели: T = 9.960000 c;
2. Числовые значения параметров системы самонаведения
Krp = 1.000000;
Trp = 0.330000, с;
Xmax = 0.418879, рад;
Ksn = 0.283000, рад/с;
Tsn = 0.155000, с;
DZsn = 0.052000;
V = 686.700000, м/с;
G = 9.810000, м/с^2;
Kdy = 0.140000;
Kv = 1.200000, c;
mu = 0.115000, с;
Tc = 3.050000, с;
Похожие работы
... задачи динамики, определять, при каких условиях осуществимо движение с заданными свойствами. С другой стороны, и само развитие теории управления движениями материальных систем вызвало необходимость решения обратных задач динамики в различных постановках. Все это привело к тому, что обратные задачи классической механики оказались своего рода направляющими и исходными задачами современной науки об ...

... относительности (теории тяготения). Исходя из изложенного, в механике пользуются единым термином «масса», определяя массу как меру инертности тела и его гравитационных свойств. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ ТОЧКИ. РЕШЕНИЕ ЗАДАЧ ДИНАМИКИ ТОЧКИ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ МАТЕРИАЛЬНОЙ ТОЧКИ Для решения задач динамики точки будем пользоваться одной из следующих двух систем уравнений ...
... закономерностям, независимо от наших знаний о природе явлений. Всякое следствие имеет свою причину. Как и все остальное в физике, понятие детерминизма менялось по мере развития физики и всего естествознания. В 19-м веке теория Ньютона окончательно оформилась и установилась. Существенный вклад в ее становление внес П.С.Лаплас (1749 - 1827). Он был автором классических трудов по небесной механике и ...
... . 5. Получены длительные непрерывные ряды наблюдений интенсивности потока и азимутальных распределений СДВ атмосфериков, которые позволили проследить динамику грозовой активности в мировых грозовых центрах. 5.1. Морской мониторинг показал, что основной вклад в мировую грозовую активность дают континентальные и островные грозовые центры. Вариации интенсивности потока импульсов хорошо ...
0 комментариев