Навигация
Основные типы и классификация электрических машин
76752
знака
1
таблица
10
изображений
1.1. Основные типы и классификация электрических машин
Электрические машины - это электромеханические преобразователи, в которых осуществляется преобразование электрической энергии в механическую или механической в электрическую. Основное отличие электрических машин от других преобразователей в том, что они обратимы, т. е. одна и та же машина может работать в режиме двигателя, преобразуя электрическую энергию в механическую, и в режиме генератора, преобразуя механическую энергию в электрическую.
По виду создаваемого в машинах поля, в котором происходит преобразование энергии, электрические машины подразделяются на индуктивные, емкостные и индуктивно-емкостные. Современные широко применяемые в промышленности и других отраслях народного хозяйства электрические машины - индуктивные. Преобразование энергии в них осуществляется в магнитном поле. Емкостные электрические машины, хотя и были изобретены задолго до индуктивных, до сих пор не нашли практического применения из-за сложности создания достаточно мощного электрического поля, в котором происходит преобразование энергии. Индуктивно-емкостные машины появились лишь в последние годы. Преобразование энергии в них происходит в электромагнитном поле, и они объединяют свойства индуктивных и емкостных электрических машин. В практике эти машины еще не применяются, поэтому в данной работе рассматриваются только индуктивные электрические машины, которые в дальнейшем будут называться просто электрическими машинами. [7, с. 6]
Для того чтобы электрическая машина работала, в ней должно быть создано вращающееся магнитное поле. Принцип образования вращающегося поля у всех машин один и тот же.
Простейшей электрической машиной является идеальная обобщенная электрическая машина (рис. 1), т. е. машина симметричная, ненасыщенная, имеющая гладкий воздушный зазор. На статоре и роторе такой машины расположены по две обмотки: wsα и wsβ на статоре, wrα и wrβ на роторе, сдвинутые в пространстве относительно друг друга на электрический угол, равный 90°. Если к обмоткам статора или ротора такой машины подвести токи, сдвинутые во времени на электрический угол 90°, то в воздушном зазоре машины будет вращающееся круговое поле. При симметричном синусоидальном напряжении поле будет синусоидальное, так как идеальная машина не вносит в зазор пространственных гармоник. Все реальные электрические машины в той или иной степени отличаются от идеальной машины, так как в воздушном зазоре реальной машины нельзя получить синусоидальное поле.
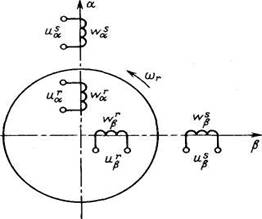
Рис. 1. Обобщенная электрическая машина
Для того чтобы МДС, необходимая для создания магнитного поля, не была чрезмерно велика, статор и ротор электрической машины выполняют из ферромагнитного материала, магнитная проводимость которого во много раз больше, чем проводимость неферромагнитной среды (µст>>µ0). При этом магнитные силовые линии поля замыкаются по магнитопроводу машины и практически не выходят за пределы ее активных частей. Участки магнитопровода, в которых поток переменный, для уменьшения потерь на вихревые токи и гистерезис выполняют шихтованными из тонких листов электротехнической стали. Участки магнитопровода машин, в которых поток постоянный (например, полюсы и станины машин постоянного тока), могут быть выполнены массивными из конструкционной стали. [7, с. 6]
Непременным условием преобразования энергии является изменение потокосцепления обмоток в зависимости от взаимного положения ее частей - статора и ротора. Это условие может быть выполнено при различных вариантах конструктивных форм магнитопровода и при различных конструкциях и расположении обмоток (рис. 2, а - г). Тот или иной вариант выбирается в зависимости от рода питающего (или генерируемого) тока, наиболее удобного способа создания поля и типа машины. Для преобразования энергии в подавляющем большинстве электрических машин используется вращательное движение.
Электрические машины обычно выполняются с одной вращающейся частью - цилиндрическим ротором и неподвижной частью - статором. Такие машины называются одномерными. Они имеют одну степень свободы. Почти все выпускаемые промышленностью машины - одномерные с цилиндрическим вращающимся ротором и внешним неподвижным статором. [7, с. 7]
Электромагнитный момент в электрических машинах приложен и к ротору, и к статору. Если дать возможность вращаться обеим частям машины, они будут перемещаться в противоположные стороны. У машин, в которых вращаются и ротор, и статор, две степени свободы. Это двухмерные машины. В навигационных приборах ротором может быть шар, который вращается относительно двух статоров, расположенных под углом 90°. Такие машины имеют три степени свободы. В космической электромеханике встречаются шестимерные электромеханические системы, в которых и ротор, и статор имеют по три степени свободы.
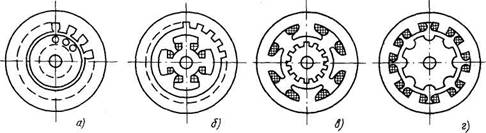
Рис. 2. Основные конструктивные исполнения электрических машин: а - асинхронная; б - синхронная; в - коллекторная; г - индукторная
Находят применение также электрические машины, в которых ротор (или и ротор, и статор) имеет форму диска. Такие машины называют торцевыми.
Электрические машины помимо вращательного могут иметь и возвратно-поступательное движение (линейные машины). В таких машинах статор и ротор разомкнуты и магнитное поле отражается от краев, что приводит к искажению поля в воздушном зазоре.
Краевой эффект в линейных электрических машинах ухудшает их энергетические показатели. Низкие энергетические показатели ограничивают применение электрических машин с возвратно-поступательным движением.
Из обычной машины с цилиндрическим статором и ротором получаются машины с сегментным статором и линейные (рис. 3). Если увеличить диаметр ротора сегментной машины до бесконечности, получим линейный двигатель (рис. 3, б).
Линейные двигатели постоянного и переменного тока находят применение в промышленности для получения линейных перемещений.
В генераторном режиме линейные машины практически не применяются.
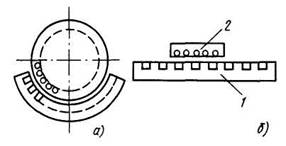
Рис. 3. Модификация конструктивного исполнения электрических машин: а – машина с сегментным статором; б – линейный двигатель; 1 – статор; 2 – ротор
В большинстве типов электрических машин магнитное поле создается переменными токами обмоток статора и ротора. Однако существует класс машин, в которых поле создается постоянными токами обмоток, расположенных только на статоре. Преобразование энергии в них происходит за счет изменения магнитного потока в воздушном зазоре из-за изменения его проводимости при вращении ротора. Ротор в таких машинах имеет ярко выраженные зубцы, перемещение которых относительно статора вызывает изменение магнитного сопротивления на участках зазора и потокосцепления обмотки статора. Такие машины называют параметрическими или индукторными. Конструктивные исполнения индукторных машин весьма разнообразны. Наибольшее распространение получила конструкция индукторной машины с двумя роторами 1 и статорами 2 (рис. 4). Если роторы сдвинуты относительно друг друга на электрический угол 90°, общее магнитное сопротивление машины во время вращения роторов не изменяется и в обмотке возбуждения 3, питающейся постоянным током, не наводится переменная составляющая напряжения. Обмотки на роторах отсутствуют. При работе машины с обмоток переменного тока 4, расположенных в пазах каждого статора, снимается напряжение. Поток возбуждения замыкается по корпусу статора и втулке ротора 5, насаженной на вал.
В зависимости от рода потребляемого или отдаваемого в сеть тока электрические машины подразделяются на машины переменного и постоянного тока. Машины переменного тока делятся на синхронные, асинхронные и коллекторные.
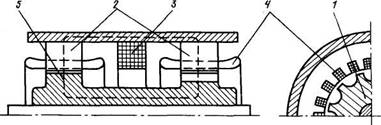
Рис. 4. Индукторная машина с двумя роторами
В синхронных машинах поле возбуждения создается обмоткой, расположенной на роторе, которая питается постоянным током. Обмотка статора соединена с сетью переменного тока. В обычном исполнении машин вращающийся ротор с обмоткой возбуждения располагается внутри статора, а статор неподвижен. Обращенная конструкция, при которой ротор с обмоткой возбуждения неподвижен, а вращается статор, в синхронных машинах встречается редко из-за сложности подвода тока к вращающейся обмотке переменного тока.
Ротор синхронной машины может быть явнополюсным, т. е. с явно выраженными полюсами, имеющими ферромагнитные сердечники с насаженными на них многовит-ковыми катушками возбуждения. Роторы синхронных машин, рассчитанных на частоту вращения 1500 и 3000 об/мин и выше, обычно выполняются неявнополюсными. При этом обмотка возбуждения укладывается в профрезерованные в роторе пазы. Обмотка переменного тока синхронных машин, как правило, распределенная, т. е. расположена равномерно по окружности внутреннего диаметра статора в пазах его магнитопровода. [7, с. 7]
В асинхронных машинах специальная обмотка возбуждения отсутствует, рабочий поток создается реактивной составляющей тока обмотки статора. Этим объясняется простота конструкции и обслуживания асинхронных двигателей, так как отсутствуют скользящие контакты для подвода тока к вращающейся обмотке возбуждения и отпадает необходимость в дополнительном источнике постоянного тока для возбуждения машины. Обмотки статоров и роторов асинхронных машин распределенные и размещены в пазах их магнитопроводов.
На роторах асинхронных машин располагается либо фазная, т. е. имеющая обычно столько же фаз, сколько и обмотка статора, изолированная от корпуса обмотка, либо короткозамкнутая. Короткозамкнутая обмотка ротора состоит из расположенных в пазах ротора замкнутых между собой по обоим торцам ротора неизолированных стержней из проводникового материала. Она может быть также выполнена заливкой пазов алюминием. В зависимости от типа обмотки ротора различают асинхронные двигатели с фазными роторами или асинхронные двигатели с короткозамкнутыми роторами. [7, с. 8]
Нормальное исполнение асинхронных машин - с ротором, расположенным внутри статора. Однако для некоторых приводов, например привода транспортера, оказывается выгоднее расположить вращающийся ротор снаружи статора. Такие машины называют обращенными или машинами с внешним ротором. Они выполняются обычно с короткозамкнутыми роторами.
Среди коллекторных машин переменного тока получили распространение в основном однофазные двигатели малой мощности. Они находят применение в приводах, к которым подвод трехфазного или постоянного тока затруднен или нецелесообразен (в электрифицированном инструменте, бытовой технике и т. п.). В машинах средней и тем более большой мощности коллекторные машины переменного тока в настоящее время в СССР не применяются. Исключение составляют отдельные специальные машины, например машины типа двигателя Шраге – Рихтера.
Большинство машин постоянного тока - это коллекторные машины. Они выпускаются мощностью от долей ватта до нескольких тысяч киловатт. Обмотки возбуждения машин постоянного тока располагаются на главных полюсах, закрепленных на станине. Выводы секций обмотки ротора (якоря) впаяны в пластины коллектора. Коллектор, вращающийся на одном валу с якорем, и неподвижный щеточный аппарат служат для преобразования постоянного тока сети в переменный ток якоря (в двигателях) или переменного многофазного тока якоря в постоянный ток сети (в генераторах постоянного тока).
Конструкция машин постоянного тока более сложная, стоимость выше и эксплуатация более дорогая, чем асинхронных, поэтому двигатели постоянного тока применяются в приводах, требующих широкого и плавного регулирования частоты вращения, или в автономных установках при питании двигателей от аккумуляторных батарей. [7, с. 8]
Подавляющее число машин постоянного тока выполняется с коллектором - механическим преобразователем частоты. Но существует несколько типов и бесколлекторных машин, например униполярные генераторы (рис. 5), которые используются для получения больших токов (до 100 кА) при низких напряжениях. В таких машинах коллектор отсутствует, но они могут работать только при наличии скользящего контакта, который состоит из щеток 1 и колец 2. Постоянный магнитный поток, созданный токами обмотки возбуждения 5, замыкается по станине 3, массивному ротору 4 и двум зазорам. Постоянные токи наводятся в массивном роторе и снимаются щетками. Чтобы уменьшить электрические потери в роторе, в нем делают пазы, в которые укладывают медные стержни 6. Стержни, приваренные к контактным кольцам, образуют на роторе короткозамкнутую обмотку.
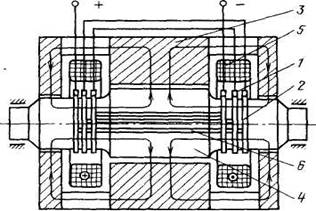
Рис. 5. Униполярная электрическая машина
В последние годы получили распространение также бесколлекторные машины постоянного тока с вентильным управлением, в которых механический преобразователь частоты заменен преобразователем частоты на полупроводниковых элементах.
Несмотря на большое число различных типов электрических машин и независимо от их конструктивного исполнения, рода и числа фаз питающего тока и способов создания магнитных полей преобразование энергии в машинах происходит только при следующем условии: во всех электрических машинах в установившихся режимах поля статора и ротора неподвижны относительно друг друга. Поле ротора, которое создается токами, протекающими в обмотке ротора, вращается относительно ротора. При этом механическая частота вращения ротора и частота вращения поля относительно ротора в сумме равны частоте вращения поля статора, поэтому частоты токов в статоре и роторе жестко связаны соотношением f 2 = f 1 s, (1)
где f 1, f 2 - частоты тока и напряжения статора и ротора; s - относительная частота вращения ротора или скольжение, определяемое частотой вращения поля статора n 1 и частотой вращения ротора машины n 2 :
s = (nl ± n 2) / n 1 (2)
В синхронных машинах обмотка возбуждения ротора питается постоянным током (f 2 = 0), и, следовательно, из (1) s = 0, откуда по (2) n= n 1 т. е. ротор синхронной машины вращается синхронно с полем, созданным токами обмотки статора.
Жесткая связь частоты тока и частоты вращения определила область применения синхронных машин. Синхронные генераторы являются практически единственными мощными генераторами электрической энергии на электростанциях. Синхронные двигатели с учетом трудностей их пуска применяются как приводы промышленных установок, длительно работающих при постоянной частоте вращения и не требующих частых пусков, например как приводные двигатели воздуходувок, компрессоров и т. п. [7, с. 9]
В асинхронных машинах ток в обмотке ротора обусловлен ЭДС, наведенной в проводниках обмотки магнитным полем статора.
Наведение ЭДС происходит только при пересечении проводниками магнитных силовых линий поля, что возможно лишь при неравенстве частот вращения ротора и поля статора (n 2 ≠ n 1). Частота тока в роторе равна f 2 = f 1 s, что обеспечивает взаимную неподвижность поля токов ротора и поля статора, а частота вращения ротора при этом равна n 2 = n 1(1 - s). При скольжении s = l ротор неподвижен (f 2 = f 1), преобразования механической энергии не происходит и имеет место трансформаторный режим работы машины.
При питании обмотки ротора постоянным током машина переходит в синхронный режим работы. При питании ротора переменным током асинхронный двигатель может вращаться с частотой большей, чем частота поля статора. Такие режимы используются редко из-за сложности пуска машины: необходим разгонный двигатель либо преобразователь частоты. Примером двигателя этого типа являются двигатели Шраге - Рихтера, в которых для преобразования частоты тока ротора используется коллектор, соединенный с добавочной обмоткой ротора. Регулирование частоты вращения двигателя производится изменением добавочной ЭДС, вводимой в обмотку ротора, путем изменения положения щеток на коллекторе .
В машинах постоянного тока поле возбуждения создается постоянным током, а поле якоря - переменным. Преобразование постоянного тока сети в многофазный переменный ток якоря происходит с помощью механического преобразователя - коллектора. Частота переменного тока якоря определяется частотой его вращения, и магнитное поле, создаваемое током якоря, неподвижно относительно поля возбуждения машины. [7, с. 9]
Бесколлекторные (вентильные) машины постоянного тока, как правило, обращенные, т. е. их обмотки возбуждения, питаемые постоянным током, расположены на вращающемся роторе, а якорные обмотки - на неподвижном статоре. Частота питания якорных обмоток задается статическим преобразователем частоты. Условие взаимной неподвижности полей статора и ротора приводит к возможности регулирования частоты вращения вала двигателя изменением частоты питания его якорных обмоток. С этой точки зрения вентильные машины постоянного тока могут рассматриваться как синхронные, обмотки переменного тока которых питаются от преобразователя частоты.
В однофазных коллекторных машинах обмотки возбуждения питаются переменным током и создают пульсирующее поле. Коллектор преобразует однофазный ток питания в многофазный переменный ток с частотой, зависящей от частоты вращения ротора, при которой магнитные поля статора и ротора неподвижны относительно друг друга. Из-за затрудненной коммутации коллекторные машины переменного тока выполняются лишь небольшой мощности
Глава 2. ОБЩАЯ ХАРАКТЕРИСТИКА СИНХРОННОГО ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ И ЕГО НАЗНАЧЕНИЕ
Синхронные машины, как и другие электрические машины, обратимы, т.е. они могут работать как в двигательном, так и генераторном режимах. Однако электропромышленность выпускает синхронные машины, предназначенные для работы только в генераторном или только в двигательном режиме, так как особенности работы машины в том или ином режиме предъявляют различные требования к конструкции машины. [6, с. 431]
Синхронные двигатели чаще работают в пусковых режимах и должны развивать больший пусковой момент, чем генераторы. Это накладывает определенные условия на конструкцию ротора: демпферную (пусковую) обмотку синхронных двигателей рассчитывают на большие токи и более длительный режим.
Для возбуждения синхронных двигателей используется электромашинная система возбуждения или тиристорная система возбуждения. В электромашинных системах возбуждения якорь возбудителя - генератора постоянного тока - соединяется с валом синхронного двигателя жестко или в тихоходных машинах - через клиноременную передачу, которая обеспечивает увеличение частоты вращения возбудителя и снижение его массы. Системы возбуждения синхронных двигателей принципиально не отличаются от систем возбуждения генераторов.
Уравнения синхронного двигателя отличаются от уравнений синхронного генератора лишь тем, что в них изменяется знак момента сопротивления.
Чтобы из генераторного режима перейти в двигательный, надо изменить знак момента сопротивления, приложенного к валу синхронной машины. Тогда изменится знак угла θ и направление активной мощности; машина начнет потреблять мощность из сети.
На угловой характеристике (рис. 6) область двигательного режима находится в зоне отрицательных углов θ. Устойчивой частью угловой характеристики в двигательном режиме является область от 0 до - 90°. Номинальный момент, соответствующий θ ном, находится в области 20-30°. Двигатель с неявнополюсным ротором имеет максимум момента при θ = - 90°:
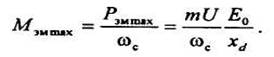 (3)
(3)
Максимальный момент зависит от размера воздушного зазора двигателя. Чем больше зазор, тем меньше xd и больше М эммах . Однако при большом зазоре растут габариты машины. Предел статической устойчивости
 (4)
(4)

Рис. 6 Угловая характеристика синхронной машины
Удельный синхронизирующий момент, как и в генераторном режиме, максимален при θ = 0 и равен нулю при θ = 90° .
Для явнополюсного двигателя зависимость Мс, Мэм = f (0) имеет такой же вид, как и для генератора, но располагается в зоне отрицательных углов θ. [6, с. 432]
U-образные характеристики синхронных двигателей имеют тот же вид, что и для генераторов. При перевозбуждении синхронный двигатель по отношению к сети является емкостью, недовозбужденный двигатель потребляет из сети реактивную мощность, являясь по отношению к сети индуктивностью. При недовозбуждении реакция якоря в синхронном двигателе - подмагничивающая, при перевозбуждении - размагничивающая. Важное значение для исследования процессов преобразования энергии в синхронных двигателях имеют рабочие характеристики (рис. 7).
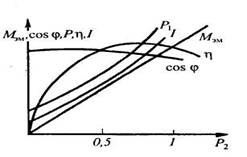
Рис. 7. Рабочие характеристики синхронного двигателя
С ростом нагрузки на валу двигателя увеличивается момент и ток в якоре, сначала по линейному закону, а затем из-за изменения параметров - по нелинейному закону. Если не изменяется If, cos φ может падать, расти или иметь максимум. Это зависит от значения If и может быть прослежено по U-образным характеристикам: при увеличении Р2 - переходе с одной U-образной характеристики на другую cos φ изменяется, так как из-за внутреннего падения напряжения кривая cos φ = 1 смещается в область больших нагрузок. При изменении If можно получить постоянное значение cos φ при разных Р2 (рис. 8). Кривая 1 на рис. 8 соответствует работе синхронного двигателя с постоянным током возбуждения в зоне недовозбуждения на U-образных характеристиках, кривая 2 – работе синхронного двигателя с перевозбуждением; кривая 3 возможна при регулировании тока возбуждения.
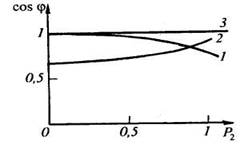
Рис. 8. Зависимости cos φ синхронного двигателя от нагрузки
Зависимость КПД от нагрузки такая же, как и для всех электрических машин.
Характерным отличием синхронных двигателей является постоянство частоты вращения при изменении нагрузки. Синхронные двигатели имеют предельно жесткие механические характеристики. [6, с. 432]
Одним из основных недостатков синхронных двигателей являются плохие пусковые свойства, которые ограничивают их применение. Пуск синхронных двигателей может быть частотным, при помощи разгонного двигателя или синхронные двигатели могут включаться на полное напряжение сети (асинхронный пуск). Наиболее распространенным является асинхронный пуск. Вследствие наличия короткозамкнутых контуров на роторе (демпферной обмотки, массивных полюсных наконечников) ротор разгоняется до частоты вращения, близкой к синхронной. Обмотка возбуждения при асинхронном пуске закорачивается на активное сопротивление. После подхода ротора к частоте вращения, близкой к синхронной ( s ≈ 0,05), обмотка возбуждения подключается к возбудителю и осуществляется грубая синхронизация машины.
Применяется также пуск с наглухо присоединенным возбудителем. В этом случае при частоте вращения, равной (0,5 ÷ 0,7) n ном, в обмотке возбуждения синхронного двигателя начинает протекать постоянный ток и машина втягивается в синхронизм. Пуск двигателя с наглухо присоединенным возбудителем сопровождается большими бросками токов и может осуществляться, если нагрузка не превышает (0,4-0,5) М ном. Однако схема пуска с наглухо присоединенным возбудителем более простая и находит все большее применение.
При тяжелых условиях пуска мощных синхронных двигателей применяется реакторный или автотрансформаторный пуск по схемам, рассмотренным для асинхронных двигателей.
При пуске синхронного двигателя с помощью разгонного двигателя синхронный двигатель доводится до почти синхронной частоты вращения. В качестве разгонного двигателя может использоваться асинхронный двигатель, имеющий большую, чем синхронный, синхронную частоту вращения или двигатель постоянного тока, если есть сеть постоянного тока. Пуск с помощью разгонного двигателя применяется редко, так как разгонный двигатель используется только при пуске. [6, с. 432]
При частотном пуске обмотка статора синхронного двигателя подключается к преобразователю частоты, который изменяет частоту от нескольких герц до номинальной частоты. При частотном пуске синхронный двигатель входит в синхронизм при малых частотах. Частотный пуск удобно использовать, если преобразователь частоты можно применять для пуска нескольких двигателей.
Сравнивая синхронные двигатели с асинхронными, следует отметить основное преимущество синхронных двигателей - возможность работать с cos φ = 1, а при перевозбуждении - и с опережающим cos φ
Максимальный момент синхронного двигателя пропорционален U, а асинхронного – U2. Поэтому синхронные двигатели менее чувствительны к изменению напряжения сети и имеют большую перегрузочную способность. Регулирование потока возбуждения путем изменения тока возбуждения обеспечивает регулирование реактивной мощности при падении напряжения и уменьшении частоты сети.
Недостатком синхронных двигателей является их более сложная конструкция, необходимость в источнике постоянного тока и худшие по сравнению с асинхронными пусковые свойства.
При мощности двигателей от нескольких киловатт до 100 кВт проявляется еще один недостаток синхронных двигателей - склонность к качаниям. При определенном соотношении параметров синхронных двигателей ротор покачивается около синхронной частоты вращения.
Синхронные двигатели при условии легких пусков целесообразно применять при мощности свыше 200 кВт. Области применения синхронных двигателей непрерывно расширяются, и их мощности возрастают до 50 МВт.
Синхронные двигатели мощностью до 1-2 кВт выполняются с явнополюсным ротором без обмотки возбуждения. За счет различия проводимости по продольной и поперечной осям машины в таких машинах возникает реактивный момент, а асинхронный пуск обеспечивается демпферной обмоткой. [6, с. 433]
На рис. 9 показаны две наиболее распространенные конструкции роторов синхронных реактивных двигателей. Четырехполюсная конструкция ротора (рис. 9, а) имеет стальной шихтованный явнополюсный магнитопровод 1 и демпферную обмотку 2. Двухполюсный шихтованный ротор, залитый алюминием, дан на рис. 9, б. Сердечник ротора 3 заливается алюминием 4, который скрепляет сердечник и образует демпферную обмотку.
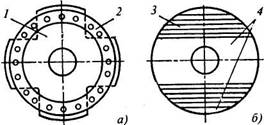
Рис. 9. Конструкции роторов синхронных реактивных двигателей
Реактивные двигатели имеют низкие cos φ и КПД (η = 0,3÷0,4), их масса больше, чем у обычных трехфазных асинхронных двигателей.
Вместо электромагнитного возбуждения можно применять постоянные магниты. Серии двигателей с постоянными магнитами выпускаются на мощности от десятков ватт до нескольких киловатт. Они имеют лучшие энергетические показатели по сравнению с реактивными.
Для обеспечения пускового момента двигатели с постоянными магнитами имеют пусковую обмотку в виде беличьей клетки, залитой алюминием. Ротор из магнитотвердого материала изготовляется путем литья из специальных сплавов. Этот процесс трудоемкий, поэтому ротор имеет
Глава 3. ОСОБЕННОСТИ ИСПЫТАНИЙ СИНХРОННЫХ ДВИГАТЕЛЕЙ
Похожие работы
... потерь, например при передаче электроэнергии; - реконструкция устаревшего оборудования; - повышение уровня использования вторичных ресурсов; - улучшение структуры производства. Приёмники электрической энергии промышленных предприятий получают питание от системы электроснабжения, которая является составной частью энергетической системы. На ГПП (главной понизительной подстанции) напряжение ...
... (от передвижения источников загрязнения) 1180,48 Всего за год: 211845,25 10. Совершенствование системы электроснабжения подземных потребителей шахты Расчет схемы электроснабжения ЦПП до участка и выбор фазокомпенсирующих устройств Основными задачами эксплуатации современных систем электроснабжения горных предприятий являются правильное определение электриче ...
... планово предупредительных ремонтов: - капитальный – средний – текущий; - капитальный – средний; - текущий - капитальный; - по фактическому состоянию электрооборудования В цехе по ремонту наземного оборудования применяется система планово предупредительного ремонта – текущий - техническое Рассмотрим диагностирование двух видов: по оценке теплового состояния оборудования и по результатам ...
... запасных частей приходится отправлять ее в специальные ремонтные предприятия. Следовательно увеличивается время нахождения в ремонте и затраты на транспортировку. Для более полного использования возможностей машинотракторного парка, необходимо, чтобы состав МТП соответствовал молочному направлению хозяйства и его конкретным возможностям для более полной загрузки техники в течении всего года, ...
0 комментариев