Геодезические сети сгущения
Системы координат WGS-84 и СК-95
Измерения в геодезических сетях
Устройство электронного тахеометра. Измерение им горизонтальных и вертикальных углов, расстояний, координат Х, У, Н точек местности
Классификация погрешностей геодезических измерений. Средняя квадратическая погрешность. Формы Гаусса и Бесселя для её вычисления
Веса измерений
Оценка точности по разностям двойных измерений и по невязкам в полигонах и ходах
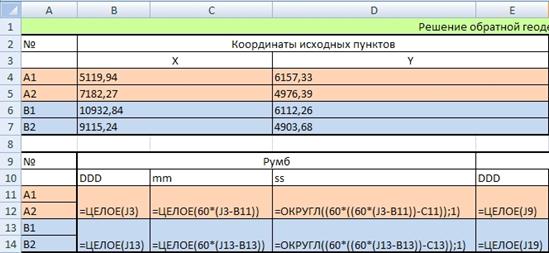
Решение прямой и обратной засечки (по варианту задания)
Уравнивание системы ходов съемочной сети
Тахеометрическая съёмка
Нанесение съёмочных и реечных точек
Навигация
Уравнивание системы ходов съемочной сети
Основы геодезических измерений
88097
знаков
19
таблиц
0
изображений
5. Уравнивание системы ходов съемочной сети
5.1 Общее понятие о системах ходов и их уравнивании
Координаты пунктов могут быть определены положением через них теодолитных ходов, опирающихся в начале и в конце хода на пункты с известными координатами и стороны с известными дирекционными углами. При математической обработке результатов таких измерений координаты определяемых пунктов получают однозначно, а их точность зависит от точности полевых измерений, точности исходных данных и принятого метода обработки измерений.
На практике возможно появление ситуаций, когда в геодезических построениях возникает неоднозначность получения определяемых величин, например координат пунктов.
С этой точки зрения рассмотрим геодезическое построение в виде системы трех теодолитных ходов с одной узловой точкой. Практическая необходимость построения такой системы обусловлена невозможностью определения положения пунктов путем проложения через них одного теодолитного хода (например, из-за отсутствия на местности необходимых видимостей). Ограничивающим фактором может быть превышение допустимой длины одиночного теодолитного хода или нарушением каких-либо других нормативных требований.
В системе теодолитных ходов положение пунктов определено от трех исходных – В, D, F, тогда как для этой цели достаточно было двух из них, следовательно, в сети имеются избыточные измерения (избыточные в смысле их необходимого числа при бесконтрольном определении координат пунктов). Так, например, координаты любого определяемого пункта сети, могут быть получены, как минимум, дважды. В таком случае говорят о необходимости уравнения.
Способы уравнения разделяются на строгие, когда уравнение производится под условием минимума суммы произведение квадратов поправок в измерение величины, и нестрогие (раздельные), когда сначала уравниваются углы, а затем раздельно между собой приращения координат.
При выборе способа уравнения исходят, прежде всего, из необходимой точности получения координат пунктов. Если раздельное уравнение обеспечивает указанное требование, то его применение в настоящее время предпочтительно, т. к. упрощает процесс вычислений. Последний может быть выполнен как посредством традиционных средств, так и с помощью микрокалькуляторов или ЭВМ.
При раздельном уравнении системы теодолитных ходов с одной узловой точкой уравнивают сначала измеренные углы, а затем по полученным вероятнейшим значениям дирекционных углов и измеренным горизонтальным положениям линий вычисляю приращение координат, которые уравнивают отдельно, приращения по оси абсцисс и приращения по оси ординат.
Уравнивание системы проводят раздельно, т.е. вначале уравнивают горизонтальные углы, а затем – приращения координат.
Вычисление координат пунктов теодолитных ходов производят в ведомости координат, куда вписывают измеренные углы, горизонтальные проложения, координаты исходных геодезических пунктов.
5.2 Упрощенное уравнение системы теодолитных ходов по варианту задания
Вычислим координаты пунктов системы теодолитных ходов с одним узловым пунктом.
Исходные данные
Координаты и дирекционные углы
| №№ пунктов | Координаты, м | |
| Х | У | |
| D В F | 4740,84 3687,80 3263,23 | 6451,27 5761,83 6767,63 |
| Дирекционные углы линий | ||
| CD EF AB | 188˚58.7' 245˚04.1' 80˚35.4' | |
Вычисление дирекционного угла
| Номер хода | Дирекчионный угол Узловой линии |
| 1 | 99˚35,9' |
| 2 | 99˚36,1' |
| 3 | 99˚36,2' |
Ведомость вычисления координат
| № | ß измер | α | d | ∆Х d×cosα | ∆У d×sinα | ∆Х исп. | ∆У исп. | Х | У |
| 1 ход | |||||||||
| А | |||||||||
| 80˚35,4' | |||||||||
| В | 155˚17,5' | 3687,80 | 5761,83 | ||||||
| 55˚52,9' | 200,02 | 112,19 | 165,59 | 112,25 | 165,67 | ||||
| 2 | 223˚43,0' | 3800,05 | 5927,5 | ||||||
| 99˚35,9' | 322,34 | -53,75 | 317,83 | -53,65 | 317,96 | ||||
| 3 | 238˚53,5' | 3746,4 | 6245,46 | ||||||
| 158˚29,4' | 508,76 | -473,33 | 186,54 | -473,18 | 186,74 | ||||
| 7 | 113˚14,0' | 3273,22 | 6432,2 | ||||||
| 91˚43,4' | 335,45 | -10,09 | 335,30 | -9,99 | 335,43 | ||||
| F | 153˚20,5' | 3263,23 | 6767,63 | ||||||
| 65˚03,9' | |||||||||
| Е | |||||||||
| 2 ход | |||||||||
| Е | |||||||||
| 245˚04,1' | |||||||||
| F | 153˚20,5' | 3263,23 | 6767,63 | ||||||
| 271˚43,6' | 335,45 | 10,11 | -335,30 | 10,11 | -335,38 | ||||
| 7 | 113˚14,0' | 3273,34 | 6432,25 | ||||||
| 338˚29,6' | 508,76 | 473,34 | -186,52 | 473,33 | -186,65 | ||||
| 3 | 118˚11,0' | 3746,67 | 6245,6 | ||||||
| 40˚18,6' | 345,76 | 263,66 | 223,68 | 263,66 | 223,6 | ||||
| 4 | 226˚15,0' | 4010,33 | 6469,20 | ||||||
| 354˚03,6' | 292,82 | 291,25 | -30,30 | 291,25 | -30,37 | ||||
| 5 | 172˚25,5' | 4301,58 | 6438,83 | ||||||
| 1˚38,1' | 439,44 | 439,26 | 12,54 | 439,26 | 12,44 | ||||
| D | 172˚39,5' | 4740,84 | 6451,27 | ||||||
| 8˚58,6' | |||||||||
| C | |||||||||
| 3 ход | |||||||||
| С | |||||||||
| 188˚58,7' | |||||||||
| D | 187˚20,5' | 4740,84 | 6451,27 | ||||||
| 181˚38,2' | 439,44 | -439,26 | -12,55 | -439,39 | -12,57 | ||||
| 5 | 187˚34,5' | 4301,45 | 6438,7 | ||||||
| 174˚03,7' | 292,82 | -291,25 | 30,29 | -291,34 | 30,28 | ||||
| 4 | 133˚45,0' | 4010,11 | 6468,98 | ||||||
| 220˚18,7' | 345,76 | -263,65 | -223,69 | -263,75 | -223,71 | ||||
| 3 | 120˚42,5' | 3746,36 | 6245,27 | ||||||
| 279˚36,2' | 322,34 | 53,77 | -317,82 | 53,68 | -317,83 | ||||
| 2 | 223˚43,0' | 3800,04 | 5927,44 | ||||||
| 235˚53,2' | 200,02 | -112,18 | -165,60 | -112,24 | -165,61 | ||||
| B | 155˚17,5' | 3687,80 | 5761,83 | ||||||
| 260˚35,7' | |||||||||
| A | |||||||||
Вычисление координат пункта
| Координаты | Номер хода | ||
| 1 | 2 | 3 | |
| X3 | 3746,4 | 3746,67 | 3746,36 |
| Y3 | 6245,46 | 6245,6 | 6245,27 |
Для проверки доброкачественности линейных измерений вычисляют по двум наиболее коротким ходам, например:
f X1+2 = X1,3 – X2,3
f Y1+2 = Y1,3 – Y2,3
f X2+3 = X2,3 – X3,3
f Y2+3 = Y2,3 – Y3,3
f X1+2 = 3746,4 - 3746,67 = -0,27;
f Y1+2 = 6245,46 – 6245,6 = -0,14;
f X2+3 = 3746,67 – 3746,36 = 0,31;
f Y2+3 = 6245,6 – 6245,27 = 0,33.
Затем вычисляют значения:
fS1+2 = √ [f2 X1+2 + f2 Y1+2]
fS2+3 = √ [f2 X2+3 + f2 Y2+3]
fS1+2 = √ [(-0,27)2 + (-0,14)2] = 0,3;
fS2+3 = √ [(0,31)2 + (0,33)2] = 0,45.
и выразив их в относительной мере:
(fS1+2) / (S1+2);
(fS2+3) / (S2+3),
сравнивают с допустимым значением относительной невязки хода (1:2000).
(fS1+2) / (S1+2) = 0,3 / 1366,57; 1: 4555
(fS2+3) / (S2+3) = 0,45 / 1922,23; 1: 4272
Обе невязки допустимы.
Среднее весовое значение X3ОК, Y3ОК координат узловой линии определяется выражениями:
X3ОК = (p1 X1,3 + p2 X2,3 + p3 X3,3) / (p1 + p2 + p3),
Y3ОК = (p1 Y1,3 + p2 Y2,3 + p3 Y3,3) / (p1 + p2 + p3).
Pi= K /[S]i,
где K-любое положительное число(К=1, [S]I-выражают в километрах.)
P1 = 1/1,36657 = 0,73
P2 = 1/1,92223 = 0,52
P3 = 1/1,60038 = 0,62
X3ОК = (0,73×3746,4 + 0,52 ×3746,67 + 0,62×3746,36) / (0,73 + 0,52 + 0,62) = 3746,5
Y3ОК = (0,73×6245,46 + 0,52 ×6245,6 + 0,62×6245,27) / (0,73 + 0,52 + 0,62) = 6245,4
Похожие работы


- уравнивание геодезических сетей, Mapsuite - создание инженерно-топографических планов, LEICA Geo Office - обработка геодезических измерений, SiteMaster - автоматизация обмерных работ, GeometricalGeodesy - решение геодезических задач в системе Mathematica, предназначены для решения различных геодезических задач. В данной работе представлено решение аналогичных задач с помощью языка ...
... них не окажется нужной, то тогда средство необходимо разработать вручную, если это оправдано с точки зрения затраченного времени и материальных ресурсов. 2. Обработка геодезических измерений с использованием электронных таблиц Для первоначальной обработки информации, полученной в результате комплекса топографо-геодезических работ, мною использовалась программа “ТОГИ”, являющаяся пакетом ...
... на стройплощадке необходимо соблюдение требований норм и правил по технике безопасности, изложенных в главе СНиП Ш-4-80 "Техника безопасности в строительстве" и ведомственных инструкциях. К выполнению геодезических работ допускаются лица, прошедшие инструктаж, оформленный приказом по строительному управлению. Опасность получения травмы или увечья определяется в зависимости от условий рабочего ...
... -электронных приборов при непосредственном участии автора. Вторая глава. Во второй главе рассмотрены разработанные методы проведения исследований метрологических установок и стендов для поверки и калибровки геодезических приборов для измерения превышений. Метод исследования короткопериодической погрешности измерения вертикальных углов геодезических приборов. Важной задачей при исследовании ...
0 комментариев