Навигация
Определение элементов взаимного ориентирования
17977
знаков
0
таблиц
7
изображений
5. Определение элементов взаимного ориентирования
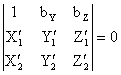
Для определения элементов взаимного ориентирования в качестве исходного используют уравнения взаимного ориентирования ( 4.3)
 .
.
Каждая точка, измеренная на стереопаре снимков, позволяет составить одно уравнение (4.3), в которое, помимо измеренных координат точек на стереопаре снимков, элементов внутреннего ориентирования и трех параметров, задающих ориентацию системы координат модели, входят 5 неизвестных элементов взаимного ориентирования.
Очевидно, что для определения элементов взаимного ориентирования необходимо измерить на стереопаре снимков не менее 5 точек.
В качестве примера рассмотрим определение элементов взаимного ориентирования by, bz, w2’, a2’, À2’.
В связи с тем, что уравнения ( 4.3) не линейны, их предварительно приводят к линейному виду и переходят к уравнению поправок:
![]() . ( 1)
. ( 1)
В уравнении поправок коэффициенты ai частные производные от функции ( 4.3) по соответствующим аргументам, а ℓ– свободный член.
Значения коэффициентов аi в уравнении ( 1) вычисляют по следующим известным значениям:
– измеренным координатам точек на стереопаре снимков – хi, yi;
– элементам внутреннего ориентирования снимков fi, x0i, y0i;
– 3 параметрам, задающим ориентацию системы координат модели (в нашем случае w1’, a1’, À1’) и приближенным значениям элементов взаимного ориентирования.
Свободный член ℓ вычисляется по формуле ( 4.3) таким же образом.
Полученную систему уравнений поправок решают методом приближений, а в случае, если измерено более 5 точек по методу наименьших квадратов (под условием VTPV=min). В результате решения находят значения элементов взаимного ориентирования.
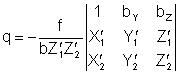
Критерием, по которому принимается решение о завершении итерраций, могут являться величины поправок к определяемым неизвестным или величины остаточных поперечных параллаксов, которые для каждой измеренной точки вычисляются по формулам:
 ; ( 2)
; ( 2)
где ![]() .
.
Величина qост представляет собой разность ординат измеренных точек на стереопаре снимков, приведенных к идеальному случаю съемки, то есть q=y1-y2.
Необходимо отметить, что при отсутствии ошибок построения снимка и ошибок измерений величина q должна быть равна 0.
При определении элементов взаимного ориентирования оптимальным вариантом считается измерение 12-18 точек на стереопаре снимков, расположенных парами или тройками в 6 стандартных зонах (рис. 1).
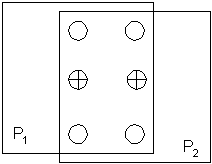 |
Рис. 1
![]()
- главная точка снимка
![]() - стандартно расположенная зона
- стандартно расположенная зона
В этом случае получается наиболее точное и надежное определение элементов взаимного ориентирования и появляется возможность локализации грубых измерений.
6. Построение фотограмметрической модели
Построение фотограмметрической модели заключается в определении координат точек объекта по измеренным на стереопаре снимков координатам их изображений в системе координат модели ОМХМYMZM.
Определение координат точек модели производится по формулам прямой фотограмметрической засечки (см. раздел 1).
При этом координаты центра проекции S принимаются произвольными (обычно ![]() 0). Также произвольно (но не равной 0) выбирается величина ВХ. В большинстве случаев практики величину ВХ принимают равной:
0). Также произвольно (но не равной 0) выбирается величина ВХ. В большинстве случаев практики величину ВХ принимают равной:
![]() ;
;
где b – базис фотографирования в масштабе снимка,
m – знаменатель масштаба снимка.
Остальные значения элементов внешнего ориентирования определяют по 8 параметрам by, bz, w1’, a1’, À1’, w2’, a2’, À2’, 5 из которых являются элементами взаимного ориентирования, а 3 определяют ориентацию системы координат модели.
При этом
 .
.
Например, если были определены элементы взаимного ориентирования a1’, À1’, w2’, a2’, À2’ и при этом величины параметров by, bz, w1’ были приняты равными нулю (by=bz=w1’=0), то BY=BZ=0, w1=0, a1=a1’, À1=À1’, w2=w2’, a2=a2’, À2=À2’.
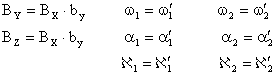
Если были определены элементы взаимного ориентирования by, bz, w2’, a2’, À2’, а величины параметров w1’, a1’, À1’ были приняты равными нулю (w1’= a1’= À1’=0), то
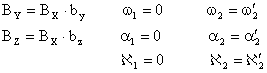 .
.
Похожие работы
... мест с точностью до нескольких сантиметров. Недостатком метода являются высокая стоимость электронных емкостных влагомеров. Влагомер МГ-4 предназначен для оперативного производственного контроля влажности строительных материалов и изделий, пилопродукции и деревянных деталей по ГОСТ 21718 и ГОСТ 16588. Влагомер может быть использован для измерения влажности широкой номенклатуры твёрдых и сыпучих ...
... большую часть ученых сто лет назад, сегодня трещит по всем швам, не выдерживая потока новых открытий, а также существования других теорий происхождения человека, которые мы рассмотрим ниже. Теория эволюции человека А. Харди Не противоречит теории эволюции, а только слегка заменяет нашего прародителя теория ученного А.Харди, который считает, что человек произошел от водной обезьяны. Главное ...
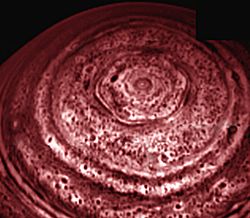
... грозовые разряды, полярные сияния, ультрафиолетовое излучение водорода. 2.1. «ГИГАНТСКИЙ ГЕКСАГОН» Гигантский гексагон — на сегодняшний день не имеющий строгого объяснения атмосферный феномен на планете Сатурн. Представляет собой геометрически правильный шестиугольник с поперечником в 25 тыс. километров, находящийся на северном полюсе Сатурна. По всей видимости, гексагон является ...
... бытовых проблем Коэффициенты: K1 – воображение, мечты K2 – психологическое влияние K3 – физическое состояние организма K4 – эмоциональное состояние организма K5 – время общения Как вы понимаете, я не первый, кто разработал свою формулу любви. Люди давно пытаются определить закономерности развития любви и описать механизмы ее возникновения с помощью аналитических законов и формул. Но мои ...
0 комментариев