Анализ технического задания
Структура ФММР
Макромодели
Факторные модели
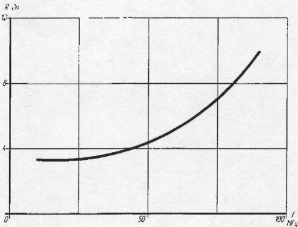
Измерение динамических параметров
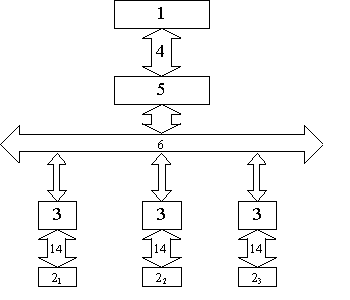
Структурная схема тестера
Обоснование элементной базы
Расчёт теплового режима блока
Технологическая часть
Определение количественных показателей технологичности конструкции разрабатываемой материнской платы
Навигация
Структура ФММР
Блок управления и контроля автоматизированного тестера параметров радиоэлементов
57842
знака
15
таблиц
18
изображений
2.2 Структура ФММР
Кроме множества N полюсов, структуру ФММР представляют под множество А полюсов для электропитания по переменному току в процессе преобразования сигналов и под множество S полюсов для электропитания МП по постоянному току для создания рабочего режима.
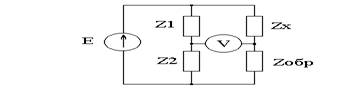
Связь между множествами A, S и N определяет выражение
А £ N, S £ N. (2.4)
![]()
![]() Пусть а- размер А, а bi – его элемент при i=1,a , s-размер S, Сj- его элемент при j=1,s.
Пусть а- размер А, а bi – его элемент при i=1,a , s-размер S, Сj- его элемент при j=1,s.
В случае ФМП множество полюсов N представляет собой объединение полюсов A и S, т.е.
N=AUS. (2.5)
При этом возможны следующие отношения между A, S и N.
Для пассивных устройств
S=0, A=N. (2.6)
Для устройств постоянного тока, для которых мгновенными измерениями сигналов во времени можно пренебречь
A=0, S=N. (2.7)
Подмножества A и S совпадают (например для транзистора)
A=S=N. (2.8)
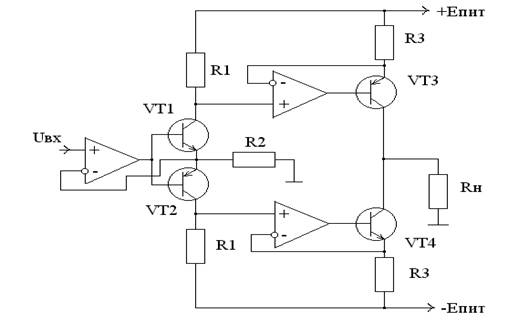
Для устройств типа операционного усилителя
AÌS=N. (2.9)
Полюса А и S изолированы друг от друга (некоторые интегральные схемы)
AÌS, N=A+S. (2.10)
Условия (2.6)-(2.10) необходимо учитывать как при конкретном применении МП, так и при организации процесса измерения его параметров.
2.3 Базовый узел ФММР
В качестве базового узла ФММР можно выбрать любой из его полюсов и даже объединить несколько полюсов. В этом случае порядок МП понизится на число полюсов принятых в качестве базовых, и его модель принципиально упростится.
С другой стороны базовый узел может быть внешним по отношению к МП, т.е. электрически с МП не связан. В этом случае первый закон Кирхгофа для мгновенных токов, втекающих в N-полюсник, может быть записан в виде
|
А линейные устройства будут иметь особенные матрицы параметров, т.е. сумма элементов этих матриц по строкам и столбцам будет равна 0.
В этой связи для описания ФММР достаточно идентифицировать N-1 строк и столбцов.
2.4 Структура элементной базы
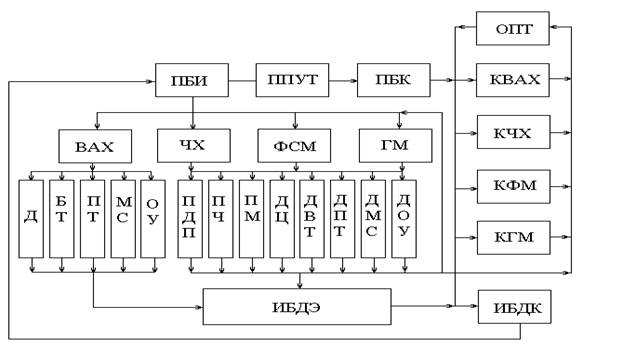
Структура элементной базы РЭА приведена на рисунке 2.2.
Согласно рисунку 2.2 элементная база (ЭБ) подразделяется на двухполюсники (ДП) и многополюсники (МП). Считаем необходимым выделить ДП в отдельное подмножество в виду их исключительного значения в качестве компонент, на основе которых конструируется более сложные по структуре и назначению компоненты, в том числе и МП. ДП и МП в свою очередь подразделяются на пассивные (ПЭ) и активные (АЭ) элементы. АЭ отличаются от ПЭ тем, что режим их функционирования обязательно определяют дополнительные факторы, например, токи напряжения смещения рабочей точки. Подклассами П и А являются элементы: дискретные элементы (Д)- элементы со сосредоточенными постоянными параметрами, относительно простой конструкции и принципа действия (резисторы, конденсаторы, транзисторы и т.п. ); с распределенными параметрами (РП); акустоэлектронные элементы (АЭ); функциональные элементы (ФЭ); интегральные схемы (ИС); цифровые элементы (ЦЭ). По существу, подклассы элементов, определяющих структуру АЭ и ПЭ, совпадают за исключением ЦЭ, которые являются особым подклассом активных элементов, элементарных логических ИС до сложнейших микропроцессорных устройств.
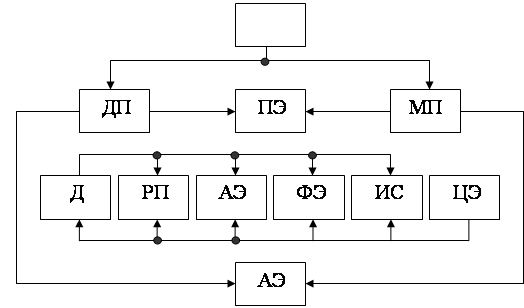
Рисунок 2.2 - Структура элементной базы РЭА.
2.5 Модели РЭ для САПР электронных схем
2.5.1 Встроенные модели
В современных САПР электронных схем, например, PSpice широко используются встроенные модели. В системе PSpice в состав этих моделей входят модели диода, биполярного транзистора, канального полевого транзистора, МОП-транзистора и магнитного сердечника. Указанные модели позволяют рассчитывать статические линейные и нелинейные динамические режимы. В основу моделей диодов и транзисторов положены идеи выдвинутые Эберсом и Моллом. В этих моделях отражены достижения последних десятилетий.
К достоинствам встроенных моделей можно отнести:
− элементы, указанные выше, можно аттестовать по справочным данным;
− в зависимости от решаемой задачи можно определить уровень сложности моделей, тем самым оптимизируя процесс вычисления;
− для МОП транзистора предлагается 4 уровня сложности, а для биполярного транзистора 3, кроме моделей Гуммеля-Пунна аттестуемой 59 параметрами и константами.
Также предусмотрены усеченное использование моделей Эберса-Молла на основе 16-20 параметров, предоставление пользователю корректировки встроенных моделей.
К недостаткам встроенных моделей, приведенных в литературе /2/ следует отнести их сложность. Анализ показывает, что для расчета малосигнальной модели биполярного транзистора требуется использовать практически весь математический аппарат нелинейного варианта его модели.
Также к недостаткам следует отнести ограниченный частотный диапазон. По данным /2/ частотный диапазон биполярного транзистора ограничен 100 МГц. Отсутствие достаточного объема справочной информации и связанной с этим необходимость организации сбора дополнительной информации, путем реализации дополнительных измерительных процессов.
Похожие работы
... плана ФЭ. Большое разнообразие моделей РК приводит к необходимости использования разнообразных способов и технических средств для измерения их параметров. Как правило, статические и динамические параметры РК измеряют на разных технологических установках. Методы построения средств измерения для идентификации моделей РК могут быть сведены к следующим принципам, учитывающим особенности подключения ...
... может быть определена в результате решения матричного уравнения Y = 2(K - Ko ) , (16) где -1 - знак обращения матриц К и Ко. 3.4 Методика измерения двух- и четырехполюсных радиоэлементов Для случая двухполюсника n = 1 (17) имеем i = 1; j = 0. (18) Очевидно, что при условиях (17) - (18) имеем: 1) коэффициенты матриц Ко и К с ...

... : ¾ температура, °С +25±10; ¾ относительная влажность воздуха, % 45...80; ¾ атмосферное давление, мм рт. ст. 630...800. Так как блок интерфейсных адаптеров предназначен для работы в нормальных условиях, в качестве номинальных значений климатических факторов указанные выше принимают нормальные значения ...
... в народном хозяйстве. Специальная часть. 3. 1. Определение задачи. Из задания на курсовое проектирование определим суть задачи: для некоторого синхронного цифрового автомата необходимо спроектировать устройство управления на основе жёсткой логики, которое в соответствии с заданными кодами микрокоманд формирует на выходной десятиразрядной шине управляющую последовательность цифровых сигналов. 3. ...
0 комментариев