Анализ технического задания
Структура ФММР
Макромодели
Факторные модели
Измерение динамических параметров
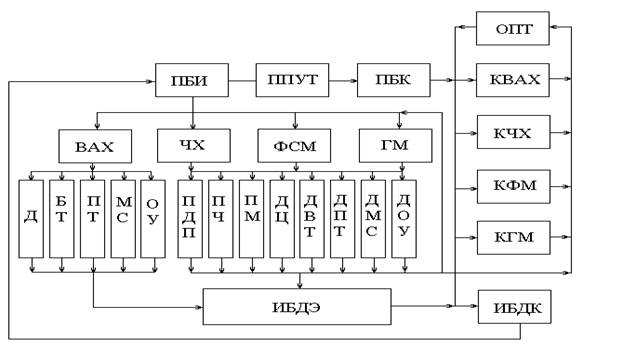
Структурная схема тестера
Обоснование элементной базы
Расчёт теплового режима блока
Технологическая часть
Определение количественных показателей технологичности конструкции разрабатываемой материнской платы
Навигация
Измерение динамических параметров
Блок управления и контроля автоматизированного тестера параметров радиоэлементов
57842
знака
15
таблиц
18
изображений
3.1.2 Измерение динамических параметров
Рассмотрим условия реализации принятого машинно-ориентированного способа измерения линейных параметров многополюсника.
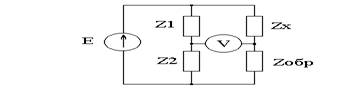
Согласно этому способу, сущность которого приведена в работах /9/, для определения Y-матрицы многополюсника необходимо выполнить измерение матрицы Uo напряжений холостого хода согласно схеме, рисунок 3.4а, на которой изображены: источник синусоидального напряжения Ei, многополюсник эквивалентный паразитным параметрам измерительной цепи с матрицей проводимости Yo. Источник Ei подключен к i-му входу-полюсу через комплексное сопротивление Zi, а остальные полюсы-входы нагружены на комплексные сопротивления Zj (j=1).
Индексами i и j обозначены точки подключения измерительного прибора, а именно пробник измерительного канала векторного вольтметра.
Согласно рисунку 3.4а при отсутствии измеряемого многополюсника (ИМП) и поочередном подключении последовательно к каждому резистору Zi источника Ei измеряют диагональные Uii и недиагональные Uoji компоненты матрицы Uo. Затем при поочередном подключении образцовой Yoi меры последовательно к каждому источнику Ei с внутренним сопротивлением Zi (рисунок 3.5б) измеряют напряжение Uoi - элемент вектора калибровочных напряжений Uk. Операции измерений матрицы Uo и вектора Uk опорных и калибровочных напряжений осуществляется n`+n раз, где n- число активных входов многополюсника по переменному току. На этом процесс калибровки измерительной схемы завершается. В результате определяется информация достаточная для учета влияния паразитных параметров эквивалентного многополюсника Yo.
Рабочий цикл измерения производится согласно рисунку 3.5. В этом случае параллельно схеме рисунок 3.5а подключают измеряемый многополюсник с матрицей проводимости Yo. В результате измерительные цепи оказываются нагруженными эквивалентным многополюсником с матрицей проводимости Yo, которую можно рассчитать по формуле
Yo = Y + Yo . (3.29)
Затем производится измерение элементов Uji матрицы U нагруженного режима таким же способом, как и измерение элементов матрицы Uo опорных напряжений. Переключение источника Ei производится n раз и определяются n` напряжений.
Измерение параметров многополюсника
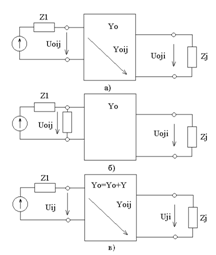
а - измерение элементов матрицы Uo опорных напряжений;
б - измерение элементов вектора Uk калибровочных напряжений;
в - измерение элементов матрицы и нагруженного режима
Рисунок 3.4 - Измерение параметров многополюсника
Элементы матрицы Uo, U и вектора Uk используются для расчета матриц передачи Ко холостого хода и К нагруженного режима.
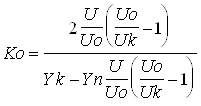
Элемент матрицы Ко рассчитывают по формуле
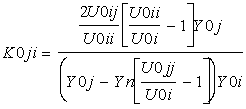 , (3.30)
, (3.30)
а элемент матрицы К - по формуле
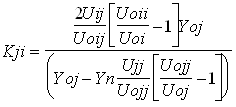 , (3.31)
, (3.31)
где Yп - полная проводимость входной цепи пробника измерительного
канала векторного вольтметра.
В работе /1/ показано, что Y- матрица измеряемого многополюсника может быть определена в результате решения матричного уравнения
Y = 2(K-1 – Ko-1), (3.32)
где -1 - знак обращения матриц К и Ко.
Для случая двухполюсника
n = 1 (3.33)
имеем
i = 1; j = 0. (3.34)
Очевидно, что при условиях (3.33), (3.34) имеем:
коэффициенты матриц Ко и К с индексами j не имеют смысла;
− всего аттестуются один коэффициент по формуле (3.30) и один коэффициент по формуле (3.31);
− индекс i не имеет смысла, так как n = 1, матричное уравнение (3.32) превращается в простое алгебраическое;
− для определения полной проводимости Y двухполюсника достаточно выполнить согласно рисунку 3.5 измерение трех напряжений: Uo холостого хода (рисунок 3.5а), Uk калибровки (рисунок 3.5б) и U нагруженного режима (рисунок 3.5в).
С учетом (3.32) - (3.33) и отмеченных замечаний из формул (3.30) - (3.31) приходим к формулам
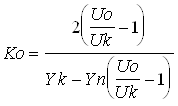 , (3.35)
, (3.35)
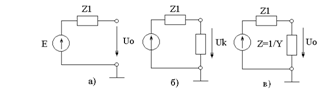
а - измерение напряжения Uo холостого хода;
б - измерение напряжения Uk калибровки при нагрузке схемы образцовой
мерой Yk;
в - измерение напряжения U при нагрузке схемы измеряемым
двухполюсником Y
Рисунок 3.5 - Измерение двухполюсника
 , (3.36)
, (3.36)
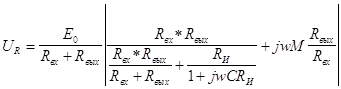
Подставляя коэффициенты Ко и К в уравнение (3.32) с учетом замечания (3.33) получаем формулу для расчета аттестуемой проводимости Y.
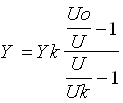 , (3.37)
, (3.37)
Таким образом, для определения полной проводимости (сопротивления) двухполюсника достаточно выполнить измерения трех напряжений согласно схемам (рисунок 3.5). При этом справедливы следующие условия:
− измерительный процесс легко автоматизировать, так как при его
реализации не требуется производить подстроечные операции;
− из трех тестов два (при регистрации напряжений Uo и Uk) являются калибровочными и при массовых измерениях на фиксированной частоте производятся только один раз;
− при выполнении предыдущего условия процесс измерения сводится к регистрации одного напряжения U с последующим расчетом по формуле (3.37);
− при диапазонных измерениях операции по калибровке можно свести к определению четырех вещественных функций, которые определяют модуль напряжения Uo
Uo = Uo(); (3.38)
аргумент напряжения Uo
= ; (3.39)
модуль напряжения Uk
Uk = Uk(); (3.40)
и аргумент напряжения Uk
К= К ; (3.41)
где - угловая частота.
При использовании стабильной измерительной аппаратуры операции по определению функций (3.38) - (3.40) можно выполнить один раз, так функции (3.36) - (3.37) определяются в режиме холостого хода или при перестановке нагрузки и их зависимость от частоты не будет сложной. В большинстве случаев эти функции можно выразить через уравнения первого или второго порядка. Для их идентификации необходимо выполнить измерения в двух - трех точках заданного частотного диапазона.
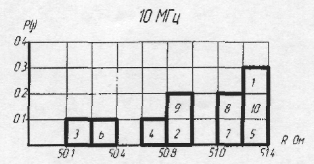
Процесс определения АЧХ и ФЧХ двухполюсника может быть сведен к измерению модуля и фазы напряжения U согласно схеме рисунок 3.5в; определения по АЧХ и ФЧХ напряжений Uo и Uk на измеряемой частоте; определение модуля и аргумента проводимости Y на частоте измерения; выполнение аналогичных измерений на всех дискретных точках частотного диапазона, определенных планом эксперимента; вычисление АЧХ и ФЧХ проводимости Y двухполюсника; обработка АЧХ и ФЧХ для определения интересующих пользователя параметров, наблюдения на экране дисплея графиков и т.п.
При реализации измерений согласно принятых методам следует учитывать специфику измерительных цепей, в котором эти измерения проводятся.
Похожие работы
... плана ФЭ. Большое разнообразие моделей РК приводит к необходимости использования разнообразных способов и технических средств для измерения их параметров. Как правило, статические и динамические параметры РК измеряют на разных технологических установках. Методы построения средств измерения для идентификации моделей РК могут быть сведены к следующим принципам, учитывающим особенности подключения ...
... может быть определена в результате решения матричного уравнения Y = 2(K - Ko ) , (16) где -1 - знак обращения матриц К и Ко. 3.4 Методика измерения двух- и четырехполюсных радиоэлементов Для случая двухполюсника n = 1 (17) имеем i = 1; j = 0. (18) Очевидно, что при условиях (17) - (18) имеем: 1) коэффициенты матриц Ко и К с ...

... : ¾ температура, °С +25±10; ¾ относительная влажность воздуха, % 45...80; ¾ атмосферное давление, мм рт. ст. 630...800. Так как блок интерфейсных адаптеров предназначен для работы в нормальных условиях, в качестве номинальных значений климатических факторов указанные выше принимают нормальные значения ...
... в народном хозяйстве. Специальная часть. 3. 1. Определение задачи. Из задания на курсовое проектирование определим суть задачи: для некоторого синхронного цифрового автомата необходимо спроектировать устройство управления на основе жёсткой логики, которое в соответствии с заданными кодами микрокоманд формирует на выходной десятиразрядной шине управляющую последовательность цифровых сигналов. 3. ...
0 комментариев