Навигация
Для построения этих диаграмм составим таблицу 3
41750
знаков
6
таблиц
0
изображений
3.2.1. Для построения этих диаграмм составим таблицу 3.
Рu = Ра – 0,1 м/мм2 .
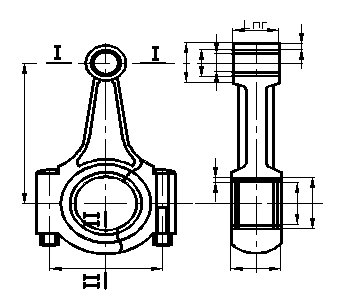
Сила Fв давления газов на поршень: Fв = Рu* Аn , где, Аn – площадь поршня в мм2.
Аn = pd2/4 = 3,14 * 1202/4 = 11304 мм2.
Сила инерции шатуна Fun по формуле: Fun = - mn* ав н.
где, mn – масса поршня кг,
ав – ускорение поршня м/с2.
Fun = - 2,5 * ав н.
Результирующая сила F, действующая на поршень: F = Fв + Funн.
4.Результирующая сила инерции шатуна.
4.1 Результирующая сила инерции шатуна для 10 положения коленвала (j = 3000)
4.1.1.Результирующую силу инерции шатуна определим способом переноса этой силы на величину h плеча момента сил инерции:
Fuш = - mш * аsш, Н ,
где mш = 4,7 кг - масса шатуна,
аsш = 1580 м/с2 - ускорение центра масс шатуна (для 10 - го положения).
Знак минус означает, что направление силы инерции противоположно направлению ускорения.
4.1.2. Шатун совершает сложное движение. Поэтому аsш мы рассматриваем как сумму двух ускорений: аsш = ас + аsшс ,
где, ас – ускорение центра масс шатуна в переносном ( поступательном) движение вместе с точкой С:
аsшс – ускорение центра масс шатуна в относительном ( вращательном ) движении вокруг точки С.
Fuш = -mш (ас + аsшс ) = [-mш m а (pс)] + [-mш m а (сSш)],
-mш m а (pс) = - Fuш’, -mш m а (сSш) = - Fuш’’,
Fuш = Fuш’ + Fuш’’,
Fuш’ – сила инерции, возникающая при переносном движении шатуна. Fuш’ приложена в центре масс.
Fuш’’ – сила инерции, возникающая при относительном движении шатуна. Fuш’’ приложена в центре качания.
4.1.3. Fuш’ = - mш * ас = -4,7 * 2384,64 = - 11,207 н.
Fuш’’ = - mш * аsшс = -4,7 * 587 = 2758,9 н.
Положение центра качания определяется:
Lск = LcSш + Jш/ mш * LcSш = 0,075 + 0,0294/4,7 * 0,075 = 0,159 м.
После геометрического сложения Fuш’ и Fuш’’ получаем
Fuш = - mш * аsш = - 4,7 *1580 = - 7426 н.
Lстш = mL* (стш) = 0,002 * 26 = 0,052 м.
Определяем угловое ускорение шатуна:
Eш = а всt/ Lвс =-1928/0,25 = - 7712 рад/с2.
Тиш = - Jш* Еш = -0,294 * (-7712) = 226 нм.
Силу Fuш и момент Тuш заменяем одной равнодействующей силой Fuш, смещённой параллельно самой себе на расстояние h.
h = Тuш /Fuш = 226/7426 = 0,03 м = 30 мм.
5.Силовое исследование механизмов
5.1 Силовое исследование групп поршень – шатун для рабочего хода (10 – ое положение коленвала)
5.1.1.Силовое исследование производим для каждой структурной группы отдельно. К звеньям группы поршень – шатун приложены следующие внешние силы:
К звену 4 – поршень – сила F4 в точке В.
F4 = Fв + Fun + Gn,
где Fв – сила давления газов на поршень. Fв = 226н.
Fun – сила инерции поршня. Fun = - mn* ав = -2,5 * 790 = -1975 н.
G – вес поршня,
Gn = mn* g = 2,5 * 9,8 = 24,5 н.
F4 = 226 - 1975 + 24,5 = -1724,5 н.
Сила направлена вверх к звену 3 – шатуна – сила Gш в точке Sш и сила Fсил – в точке Тш.
Gш = mш* g = 4,7 * 9,8 = 46,06 н.
Fuш = -7426 н.
5.1.2.Кроме внешних сил на звенья действуют ещё реакции в кинематических парах. На звено 4(поршень) – реакция R14 со стороны звена 1(цилиндр, для этой реакции известна только её линия действия (прямая аа, перпендикулярная оси цилиндра), величина и точка приложения неизвестны.
На звено 4 действует также со стороны звена 3(шатун) реакция R34, приложенная в точке В, величина и направления её неизвестны. На звено 3 действует со стороны звена 4 реакция R43, приложенная в точке В, равная по величине реакции R34 и противоположно ей направленная.
R34 = - R43.
В точке С на звено 3 действует реакция R23 со стороны звена 2 (кривошипа). Величина и направления её неизвестны. Поэтому из С проводим в произвольном направлении вектор реакции R23, раскладывая её на две взаимно перпендикулярные составляющие: R23n и R23t.
R23 = R23n + R23t.
5.1.3. Величину R23t определяем из уравнения равновесия момента:
Tв (Gш) + Tв (Fсил) + Tв (R23t) = 0.
Учитывая направление сил Gш и Fсил и условно
R23t, то: Gшh2 – Fсилh1 + R23t* l = 0
R23t = (Fuшh1 - Gшh2)/l = (7426 * 0,026 – 46,06 * 0,052)/0,25 = 2608 н.
h1 = 0,026 м ; h2 = 0,052 м.
5.1.4. Для определения результирующей R23nи R14 составляем уравнение равновесия всех сил, действующих на группу:
R14 +F4 + Gш + Fuш + R23t+ R23n = 0;
R23 = mF (се) = 40 * 57 = 2280 н.
R14 = mF (еа) = 40 * 71 = 2840 н.
R43 = -R43 = mF (ев) = 40 * 21 = 840 н.
5.2. Силовое исследование группы начального звена для положения рабочего хода (10-ое положение коленвала)
5.2.1. Строим расчетную схему группы начального звена.
К начальному звену приложены силы: в точке С – R32 = 2280 н.
В точке Sк вес Gк = mк* q = 10,5 * 9,8 = 102,9н.
Тут же сила инерции кривошипа Fик направленные к точкам С:
Fик = - mк* аsк = -10,5 * 587 = -5870 н.
5.2.2. Уравновешивающий момент Ту – момент сил сопротивления. Направление Ту по часовой стрелке – всасывание.
5.2.3. Уравнение равновесия моментов относительно оси О вращения кривошипного вала всех сил, действующих на начальное звено:
То(R32) + То (Gr) + То(Fuк) + То(R12) + Ту = 0.
Моменты сил инерции Fик и FикVII кривошипов и реакции R12 стойки на кривошип равны нулю, т.к. линии действия этих сил проходят через ось вала О.
- R32h1 – R52he + Tу = 0, Tу = R32h1 + R52h2.
Измеряя длины отрезков на чертеже и учитывая масштаб чертежа: h1 = 0,064 м ; h2 = 0,054м.
Ту = 2280 * 0,064 + 3480 * 0,054 = 332 мм.
5.2.4. Если вращательное движение передаётся при помощи зубчатой передачи, то Ту создаётся уравновешивающей силой Fу , величину которой надо определить.
После чего можно определить реакцию R12.
Fу = Ту/h3 = 332/ 0,092 = 3608 н.
5.2.5. Векторное уравнение равновесия сил, действующих на начальное звено:
Gк + Fик + R32 + GкVII + FикVII + R52 + R12 + Fу = 0; R12 = mF (la).
5.3 Определение уравновешивающей силы Fу способом рычага Жуковского (10-ое положение коленвала)
5.3.1. Строим в масштабе mL = 0,001 м/мм кинематическую схему исследуемого двухцилиндрового двигателя, к звеньям которого приложены силы :
в точке В – сила F4 = -1724,5 н.
в точке Sk – вес кривошипа Gk = 102,9 н и сила инерции Fик = 5870 н.
в точке Sш – вес шатуна Gш = 46,06 н.
в точке Тш – сила инерции шатуна Fuш = -7426 н.
5.3.2. В рассматриваемом положении - j = 3000 (такт всасывания) в первом цилиндре, сжатие во 2ом двигатель не отдаёт, а получает энергию. Поэтому линия действия и направление силы Fу – будет линия зацепления N’’N’’, а направление по направлению скорости точки N’’.
5.3.3. Для определения величины силы Fу строим повёрнутый ( на 900 ) план скоростей. План скоростей строим в масштабе mv = 0,1779 м/с/мм.
(рс) = Vc/mv = 12,45/0,1779 = 70,3 мм,
(рв) = Vв10/mv = - 11,5/0,1779 = -64,9 мм,
(рSк) = (рс) ек/r = 70,3 * (0,025/ 0,07) = 24,9 мм,
(сSш) = (св) LcSш/Lcв = еш/l = 36 * ( 0,075/0,25 ) = 10,8 мм,
( сtш) = (св) Lcтш/Lcв = 36 * (0,096/0,25 ) = 9,8 мм,
( рm1) = w * rв1/mv= 177,9 * 0,064/ 0,1779 = 64 мм.
5.3.4. Переносим внешние силы. Согласно теореме Н.Е. Жуковского о жёстком рычаге : сумма моментов относительно точки р – полюса повёрнутого плана – всех сил, перенесённых параллельно самим себе в одноимённые точки повёрнутого плана, равняться нулю.
Тр ( Gк ) + Тр ( Fuk ) + Тр ( Gш ) + Тр ( F4 ) + Тр ( Fuш ) + Тр ( Fу ) = 0;
Тр ( Fuk ) = 0 т.к. линия действия через полюс Р
Gш h1 + F4 h2 + Fuш h3 + Gк h4 - Fу h5 = 0.
Замеряем на повёрнутом плане скоростей длины плеч:
h1 = 22 мм; h2 = 22 мм; h3 = 61 мм; h4 = 57 мм;
При силовом исследовании группы начального звена мы получили:
Fу = ( Gш h1 + F4 h2 + Fuш h3 + Gк h4 )/ h5 =
= ( 46,06 * 22 + 1724 * 22 + 7426 * 61 + 102,9 * 57)/67 = 5164 н.
Расхождение результатов: (5201 – 5164)/5201 = 0,0105 = 1,05 %; расхождение до 5%.
6. Смещенное зацепление зубчатой пары
6.1 Выбор коэффициентов смещения исходного контура
6.1.1. Общее передаточное число передачи:
Uо = nд * nм = 1700/347 = 4,8.
Частное передаточное число зубчатой пары
Uп = Uо/Uпл =4,8/3,2 = 1,5.
6.1.2. Число зубьев z1 ведомого колеса:
Z1 = Z2 Uп = 26 . 1,5 = 17.
Принимаем Z1 = 17.
6.1.3. Окончательно:
Uп = Z2/Z1 = 26/17 = 1,5.
Uо = Uп * Uпл = 1,5 . 3,2 = 4,8.
nм = nн * nд / Uо = 1700/4,8 = 354,16об/мин.
6.1.4. Число оборотов ведомого колеса зубчатой пары:
n2 = nд/Un = 1700/1,5 = 1133,3 об/мин.
6.1.5. Для колес закрытой передачи выбираем систему коррекции профессора В. Н. Кудрявцева.
для колес Z1 = 17 и Z2 = 26; X1 = 0,898, X2 = 0,517;
6.2 Расчет основных геометрических параметров
6.2.1. Делительное межосевое расстояние – а = 0,5(Z1 + Z2)mп = 0,5(17 + 26)8 = 172 мм.
6.2.2. Коэффициент суммы смещений – Xe = X1 + X2 = 0,898 + 0,517 = 1,415.
6.2.3. Угол зацепления - an
invaw = (2Xe* tga)/(Z1 + Z2) + inva = (2 . 1,415 . 0,36397) /(26 + 17) + 0,014904 = 0,38868.
l - угол профиля зуба рейки a = 200 ;cos200 = 0,93969; tg200 = 0,36397; inva = inv200 = 0,014904.
По таблице находим aw= 2608’; cosaw = 0,8895; sinaw = 0,3971; tgaw= 0,432.
6.2.4. Межосевое расстояние - аw
aw = (Z1 + Z2) * mп/2 * cosa/cosaw= (17 + 26)8/2 . 0,93969/0,8895 = 181,632 мм.
6.2.5. Расчет диаметров зубчатых колес:
а) делительные диаметры:
d1 = Z1 * mп = 17 . 8 = 136 мм.
d2= Z2*mп = 26 . 8 = 208 мм.
б) начальные диаметры:
dw1 = 2aw/Un+1 = 2 . 181,632/1,5 + 1 = 145,3 мм.
dw2= 2aw * Un/Un +1 = 2 . 181,632 . 1,5/1,5 + 1 = 217,9 мм.
в) коэффициент воспринимаемого сечения – Y
Y=(аw – а)/mn = 181,632 – 172/8 = 1,204.
г) коэффициент уравнительного сечения -DY
DY= Хå- Y = 1,415 – 1,204 = 0,211.
д) диаметр вершин зубьев:
da1 = d1 + 2(h*a+ x1 - DY)mп = 162,99 мм.
da2 = d2 + 2(h*a + x2 - DY)mп= 224,89 мм.
е) диаметр впадины:
df1 = d1 – 2(h*a + C* - x1)mп = 130,3 мм.
df2= d2– 2(h*a + C* - x2)mп = 196,2 мм.
ж) основные диаметры:
dв1 = d1cosa = 136 . 0,93969 = 127,7 мм.
dв2 = d2cosa = 208 . 0,93969 = 195,7 мм.
6.2.6. Шаг зацепления – P
P = pm = 3,14 . 8 = 25,15 мм.
6.2.7. Основной окружной шаг – Pв
Pв = P . cosa = 25,15 . 0,93969 = 23,6 мм.
6.2.8. Глубина захода зубьев – hd
hd = (2h*a - DY)mп = ( 2 . 1 – 0,211)8 = 14,3 мм.
6.2.9. Высота зуба – h
h = (2h*a + C* - DY)mп = (2 . 1 + 0,25 – 0,211)8 = 16,31 мм.
6.2.10. Высота головок и ножек зубьев:
а) высота делительной головки шестерни – ha1:
ha1 = (h*a + x1 - DY)mп = ( 1 + 0,898 – 0,211)8 = 13,49 мм.
б)высота делительной головки колеса – ha2:
ha2 = (h*a+ x2 - DY)mп = (1 + 0,517 – 0,211)8 = 10,44 мм.
в) высота делительной ножки шестерни – hf1:
hf1 = (h*a + C* - x1)mп = (1 + 0,25 – 0,898)8 = 2,81 мм.
г) высота делительной ножки колеса – hf2:
hf2 = (h*a + C* - x2)mп = (1 + 0,25 – 0,517)8 = 5,86 мм.
д) высота начальной головки шестерни – haw1:
haw1 = 0,5(da1 – dw1) = 0,5( 162,99 – 145,3 ) = 8,84 мм;
е) высота начальной головки колеса – haw2:
haw2 = 0,5(da2 – dw2) = 0,5( 228,8 – 217,9 ) = 5,49 мм.
ж) высота начальной ножки шестерни – hwf1:
hwf1 = 0,5(dw1 – df1) = 0,5( 145,3 – 130,3 ) = 7,5 мм.
з) высота начальной ножки колеса – hwf2:
hwf2 = 0,5(dw2 – df2) = 0,5( 217,9 – 196,2 ) = 10,8 мм.
6.2.11. Окружная толщина зуба:
а) делительная толщина зуба шестерни – S1:
S1 = pmп/2 + 2x1mпtga = (3,14 * 8)/2 + 2 * 0,898 * 8 * 0,36397 = 17,7 мм.
б) делительная толщина зуба колеса – S2:
S2 = pmп/2 + 2x2 mпtga = (3,14 * 8)/2 + 2 * 0,517 * 8 * 0,36397 = 15,57 мм.
в) начальная толщина зуба шестерни – Sw1:
Sw1 = dw1(p/2Z1 + 2X1* tga/Z1 +inva - invaw) = 15,11 мм.
г) начальная толщина зуба колеса – Sw2:
Sw2 = dw2(p/2Z2 + 2X2* tga/Z2 +inva - invaw) = 11,007 мм.
6.2.12. Проверка величин Sw1 и Sw2:
Sw1 + Sw2 = Pw = pdw1/Z1 = pdw2/Z2
Sw1 + Sw2 = 15,11 + 11,007 = 26,11 мм.
pdw1/Z1 = 3,14 * 145,3/17 = 26,8 мм.
pdw2/Z2 = 3,14 * 217,9/26 = 26,3 мм.
6.2.13. Проверка величин haи hf:
h = ha1 + hf1 = 13,49 + 2,81 = 16,3 мм.
h = ha2 + hf2 = 10,44 + 5,86 = 16,3 мм.
h = hwa1 + hwf1 = 8,84 + 7,5 = 16,3 мм.
h = hwa2 + hwf2 = 5,49 + 10,85 = 16,3 мм.
6.2.14.da1 + df2 = da2 + df1;
162,99 + 196,2 = 224,89 + 130,3 .
356,19 = 359,19.
7. Построение эвольвентного смещенного зацепления цилиндрических колес Z1 и Z2 и его исследование.
7.1 Вычерчивание профилей (смотреть методические указания часть III “Проектирование и исследование сложной зубчатой передачи” )
О1 М1 = rв1 = 63,85 мм; О2 М2 = rв2 = 97,7 мм;
7.2 Длина линии зацепления
7.2.1. Длина линии зацепления – q мм.
q = М1М2 = М1W + WМ2 = rw1 sinan+ rw2 sinan ;
q = аw sinan = 181,6 . 0,456 = 82,83 мм;
При замере длины отрезка на чертеже получаем :
(М1М2) = 83 мм. mL = 1 мм/мм;
q = mL ( М1М2) = 1 * 83 = 83 мм.
М1W = rw1 sinan = 33,13 мм,
М2W = rw2 sinan = 49,68 мм,
7.2.2. Длина активной линии зацепления qa .
qa = L1L2 = М1L2 + М2L1 – М1М2.
qa = L1L2 = M1L2 + M2L1 + M1M2; qa = Ö rа12 – rв12 + Ö rа22 – rв22 - g ;
qa = 50,9 + 58 – 8283 = 26,07 мм.
При замере длины отрезка на чертеже получаем:
(L1L2) = 26мм; qa =ma(L1 L2) = 1 . 26 = 26 мм.
Длина дополюсной части активной линии зацепления:
qt = L1W = M2L1 – M2W = 58 – 49,68 = 8,32 мм.
Длина заполюсной части активной линии зацепления:
qa = L2W = M1L2 – M1W = 50,9 – 33,13 = 17,77 мм.
Похожие работы
... 24 0,00 0,00 14,10 14,10 9,30 9,30 58,02 58,02 2.4 Исследование механизма методом кинематических диаграмм Исследование механизмов методом диаграмм производится с целями: 1. Получения наглядного представления о законе движения интересующей нас точки или звена механизма. 2. Определения скоростей и ускорений точек или звеньев на основе известного закона перемещений точек или ...
... двигателя и улучшения его показателей в соответствии с уровнем развития техники. ЛИТЕРТУРА 1. Б.Е.Железко, В.М.Адамов, И.К.Русецкий, Г.Я.Якубенко / Расчет и конструирование автомобильных и тракторных двигателей (Дипломное проектирование): Учебное пособие для вузов / Мн.:"Высшая школа", 1987 г. 2. А.И.Колчин, В.П.Демидов / Расчет автомобильных и тракторных двигателей. Учебник для ВУЗов / ...
... электроэнергии, воды, местные вентиляционные отсосы, нахождения аптечки и средств пожаротушения. 6. Конструкторская разработка 6.1 Анализ существующих конструкций и приспособлений для обкатки и испытания двигателей внутреннего сгорания Приработка и испытания двигателей внутреннего сгорания производятся на обкаточно-тормозных стендах переменного тока, включающих устройство для вращения ...
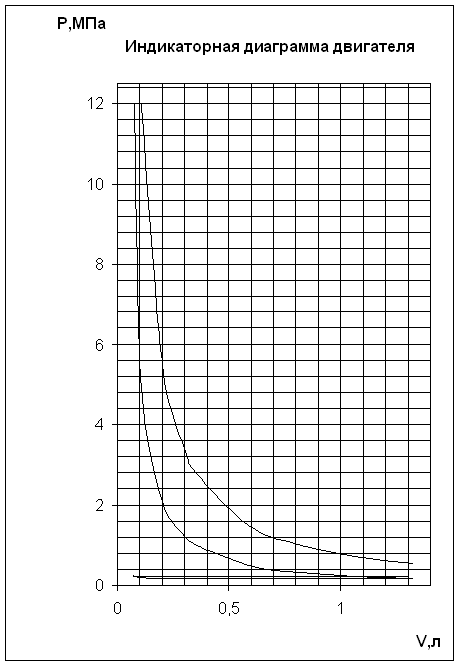
... и точки расширения соединяем плавными кривыми. После этого достраиваем процессы газообмена. Полученная индикаторная диаграмма двигателя внутреннего сгорания дизеля MAN изображена на рисунке 14.1. Рисунок 14.1 - Индикаторная диаграмма ДВС MAN. Выводы Результаты расчетов и общепринятые границы изменения расчетных параметров сводим в таблицу. Таблица - Результаты расчетов. НАЗВАНИЕ ...
0 комментариев