Навигация
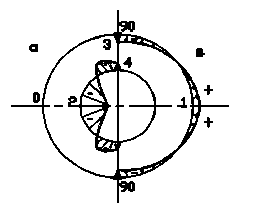
7.3 Активный профиль зуба
Слагается из профиля головки и части профиля ножки. Остальная часть ножки в зацеплении не участвуют, т.к. с сопряженным профилем она не участвует. Определение активных профилей смотри в методических указаниях, часть III.
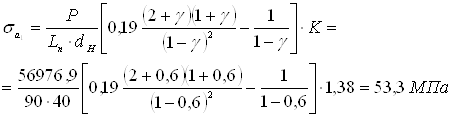
7.4 Угол ja торцового перекрытия и дуга зацепления
7.4.1. Ð а1о1а2 = ja1 ; Ð в1о2в2 = ja2 ;
ja1 = qa/ rв1 = 26,07/63,85 = 0,408 рад = 240 35’.
ja2 = qa/ rв2 = 26,07/97,7 = 0,266 рад = 15037’.
7.4.2. Основные дуги зацепления :
а1а2 = Sв1 = qa; в1в2 = Sв2 = qa;
Начальные дуги зацепления: для первого колеса – дуга АL1AL2 , для второго колеса - дуга ВL1ВL2 .
7.5. Определение коэффициента Еa торцового перекрытия
7.5.1. Еa = ja1/t1 = ja2/t2 ; Еa = qa/р . cosa = 26,07/25,15 . 0,93969 = 0,133.
7.8. Коэффициент Ã удельного давления
7.8.1. Он характеризует контактную прочность зубьев: Ã = m/rnp, где m – модуль зацепления; rnp– приведённый радиус кривизны в точке касания профиля.
7.8.2. Для наружного зацепления:
à = m(r1 + r2)/r1r2; r1 = М1k ; r2 = М2k;
r1 + r2 = М1k + М2k = М1М2 = q; Ã = mq/r1(q - r2);
q – длина линии зацепления; q = 83мм; m – модуль зацепления; m = 8 мм.
à = 664/r1(83 - r1);
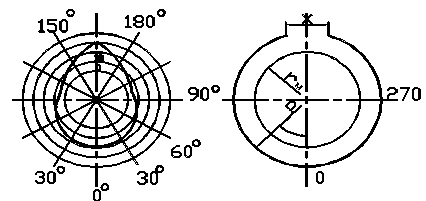
7.8.3. По вычисленным значениям Ã строим график функции Ã = ò3 (x). Построение смотреть в методических указаниях часть III.
7.9. Проверка на заклинивание
7.9.1. rа2 < О2М1 .
( О2М1)2 = аw2 + rв12 - 2 аw rв1соsan;
rа2 = Ö аw2 + rв12 - 2 аw rв1соsan ;
7.9.2. Для проектируемой передачи:
rа2 = 114,44 мм; аw = 181,632 мм; rв1 = 63,85 мм; соsan = 0,895;
rа < Ö 181,632 + 63,852 – 2 . 181,632 . 0,89 . 63,85;
rа < Ö 16421,1;
r2 < 128,14; 114,4 < 128,14;
7.10. Усилия, действующие в зацеплении
Т1 = N/w1 ; где
М1 – момент на колесе z1в мм
N – передаваемая зацеплением мощность в вm
w1 – угловая скорость колеса z1 в рад/с
N = 15600Вт; w1 = 177,9 рад/с;
Т1 = N/w1 = 15600/177,9 = 87,68 нм.
Окружное усилие – Рt:
Рt 1-2 = - Рt 2-1 = 2Т1/dw1 = 2 . 87,68/145,3 = 1,2 н.
Радиальное усилие Рa 1-2 = - Рa 2-1 = Рt 1-2 tgan = 1,2 . 0,3639 = 0,45 н.
aw= 2608’; соsaw = 0,8895; tgaw = 0,4322;
Нормальное усилие – Рн : Рn 1-2 = - Pn 2-1 = Pt 1-2/ соsaw =1,2/0,8895 = 1,36 н.
Таблица 5
| Точка на отрезкеМ1М2 | Х,мм | r1 ,нн | 83 - r1 ,нн | r1 (83 - r1 ) | Ã = 664/r1 (83 - r1 ) |
| К0 ( М1 ) | 0 | 0 | 83 | 0 | Беск. |
| К1 | 69 | 69 | 76,1 | 525,09 | 1,26 |
| К2 | 13,8 | 13,8 | 69,2 | 954,9 | 0,69 |
| К3 | 20,7 | 20,7 | 62,3 | 1289,6 | 0,51 |
| К4 (L1) | 25 | 25 | 58 | 1450 | 0,45 |
| К5 | 33 | 33 | 50 | 1500 | 0,44 |
| К6 | 41,4 | 41,4 | 41,6 | 1722,2 | 0,38 |
| К7(W) | 50 | 50 | 33 | 1650 | 0,402 |
| К8 | 55,2 | 55,2 | 27,8 | 1534,5 | 0,432 |
| К9 | 62,1 | 62,1 | 209 | 1297,8 | 0,51 |
| К10 | 69 | 69 | 14 | 966 | ,687 |
| К11 | 75,9 | 75,9 | 6,9 | 523,7 | 1,267 |
| К12 | 83 | 83 | 0 | 0 | Беск. |
8. Планетарный редуктор
8.1 Подбор чисел зубьев колёс
8.1.1. Определим число зубьев z3 и z4
z5 = z3 (U3н – 1) = 30 * ( 3,2 – 1) = 66 ; z4 = z3 (3,2 – 2)2 = 30 * 1,2/2 = 18;
8.1.2. Строим в двух проекциях развёрнутую кинематическую схему передачи в выбранном масштабе mL = 0,004 м/мм.
Для планетарных редукторов с 3 – мя сателлитами определяют возможное наибольшее число сателлитов для каждого ряда по следующей формуле:
(z4 + z3)sin p/к > z4 + 2ha*
(30 + 18) sin 180/3 > 18 + 2;
48 * 0,866 > 18 +2
8.2 Определение основных размеров колёс z3, z4 и z5
8.2.1. d3 = z3 mпл = 30 . 9 = 270 мм.
dВ3 = d3 соsa = 270 . 0,93969 = 256 мм.
dа3 = mпл (z3 + 2) = 9 . 28 = 247,5 мм.
dò3 = mпл (z3 - 2,5) = 9 . 27,5 = 162 мм.
8.2.2. d4 = z4 mпл = 18 . 9 = 162 мм.
dВ4 = d4 соsa = 162 . 0,93969 = 152,2 мм.
dа4 = mпл ( z4 + 2) = 9 . 20 = 180 мм.
dò4 = mпл (z4 – 2,5) = 9 . 15,5 = 139,5 мм.
8.2.3. d5 = z5 mпл = 66 . 9 = 594 мм.
dВ5 = d5 соsa = 594 . 0,93969 = 558,1 мм.
dа5 = mпл (z5 –2) = 9 . 64 = 576 мм.
dò5 = mпл (z5 + 2,5) = 9 . 63,5 = 616,5 мм.
8.3 Скорость вращения колёс
w3 = w2 = w1/Un = 177,9/1,5 = 118,6 рад/с.
w4/wн = U4-н = 1 – U4-5’; U4-5’ = z5/z4 = 66/18 = 3,6;
U4-n = 1 – 3,6 = - 2,6; wн = wм = pnн/30 = 3,14 . 354,16/30 = 37,06 рад/с.
w4 = -2,6 . wн = - 2,6 . 37,06 = -96,3 рад/с.
В обращённом движении: w4’ = w4 - wн = - 96,3 – 37,06 = -133,36 рад/с.
8.4 Кинематическое исследование передачи графическим способом
8.4.1. Строим картину линейных скоростей в масштабе:
mL = 0,14 мс/мм;
Смотреть в методических указаниях часть III.
8.4.2. VА = w1 rw1 = 177,9 . 0,073 = 12,98 м/с.
Длина вектора Аа: (Аа) = VА/mV = 12,98/0,14 = 92,7 мм;
8.4.3. Скорость точки В касание начальных окружностей :
(Вв) = 31 мм; Vв = mv(Вв) = 0,14 . 27 = 3,78м/с; w3 = Vв/rw3 = 3,78/0,08 = 47,25 рад/с.
8.4.5. (О4h) = 9 мм ; Vн = mv(О4h) = 0,14 * 9 = 1,26 м/с; wн = Vн/r3 + r4 = 1,26/0,2275 = 5,54рад/с.
8.4.6. Строим картину угловых скоростей строим в масштабе:
mw = mv/mL* р = 0,25/0,0031 * 50 = 1,6 рад/с/мм.
w1 = mw(к1) = 1,6 . 110 = 177,9 рад/с.
w2 = mw(к2) = 1,6 . 47 = 75,6 рад/с.
w3 = w2 = 75,6.
w4 = mw(к4) = 1,6 . 56 = 89,6 рад/с.
wн = mw(кн) = 1,6 . 17 = 27,2 рад/с.
9. Мощность Рм, передаваемая на приводной вал машины
9.1 Определим коэффициент полезного действия hпл
hпл = 1/ U4н [1- h’(1- U4н )],
где h’ – коэффициент полезного действия рассматриваемого редуктора в обращённом движении.
9.2 Величину h’ определяем по формуле
h’ = h1 * h2, где
h1 иh2 - коэффициенты полезного действия
h’ = h1 * h2 = 0,96 * 0,97 -- 0,98 * 0,99 = 0,93 – 0,97.
Принимаем среднее значение: h’ = 0,95.
hпл = 1/ U4н [1- h’(1- U4н )] = 1/3,2 [ 1 – 0,95 (1 – 3,2) ] = 0,965.
9.3 Общий КПД
h0 = hп * hпл
где hп – КПД зубчатой передачи колес Z1 и Z2, принимаем: hп = 0,97; h0 = 0,97 * 0,965 = 0,936.
На приводной вал рабочей машины передается от двигателя мощность:
Nм = h0 * Nд = 0,929 * 15,6 = 14,49.
10. Приведенный момент инерции.
10.1 Результирующий приведенный момент инерции звеньев двигателя
J3 = J31 + J3II
10.2 Определим величину приведенного момента инерции звеньев
Jз1 = Jко + Jш(wш/w )2 + mш(Vsш/w)2 + mп(Vв/w)2, где
Jкр – момент инерции кривошипа относительно оси кривошипа;
Jш – момент инерции шатуна;
Jк – момент инерции кривошипа;
lк – расстояние от центра масс кривошипа до оси его вала.
Jко = Jк + mk* ek2 = 0,00515 + 10,5 * 0,0252 = 0,0117 кг * м2.
J3I = 0,0117 + 0,0294 (wш/177,9 )2 + 4,7(Vsш/177,9)2 + 2,5(Vв/177,9)2.
10.3 Пользуясь этой формулой, составляем таблицу 6 для подсчета значений J3I, J3II, J3 для положений 12
Номер II положения первого механизма всегда будет соответствовать номеру i положение коленчатого вала, а второй механизм: iII = iI + 6, J3II(i) = J3I (I + 6)
Похожие работы
... 24 0,00 0,00 14,10 14,10 9,30 9,30 58,02 58,02 2.4 Исследование механизма методом кинематических диаграмм Исследование механизмов методом диаграмм производится с целями: 1. Получения наглядного представления о законе движения интересующей нас точки или звена механизма. 2. Определения скоростей и ускорений точек или звеньев на основе известного закона перемещений точек или ...
... двигателя и улучшения его показателей в соответствии с уровнем развития техники. ЛИТЕРТУРА 1. Б.Е.Железко, В.М.Адамов, И.К.Русецкий, Г.Я.Якубенко / Расчет и конструирование автомобильных и тракторных двигателей (Дипломное проектирование): Учебное пособие для вузов / Мн.:"Высшая школа", 1987 г. 2. А.И.Колчин, В.П.Демидов / Расчет автомобильных и тракторных двигателей. Учебник для ВУЗов / ...
... электроэнергии, воды, местные вентиляционные отсосы, нахождения аптечки и средств пожаротушения. 6. Конструкторская разработка 6.1 Анализ существующих конструкций и приспособлений для обкатки и испытания двигателей внутреннего сгорания Приработка и испытания двигателей внутреннего сгорания производятся на обкаточно-тормозных стендах переменного тока, включающих устройство для вращения ...
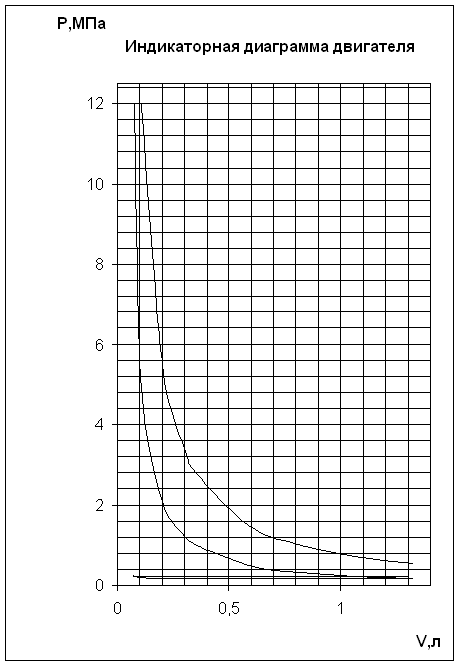
... и точки расширения соединяем плавными кривыми. После этого достраиваем процессы газообмена. Полученная индикаторная диаграмма двигателя внутреннего сгорания дизеля MAN изображена на рисунке 14.1. Рисунок 14.1 - Индикаторная диаграмма ДВС MAN. Выводы Результаты расчетов и общепринятые границы изменения расчетных параметров сводим в таблицу. Таблица - Результаты расчетов. НАЗВАНИЕ ...
0 комментариев