Навигация
Оценка точности и анализ качества исходной системы
17263
знака
1
таблица
2
изображения
2. Оценка точности и анализ качества исходной системы
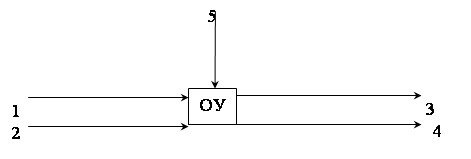
Приведём систему к единичной обратной связи , тогда структурная схема нескорректированной системы приведённой к единичной обратной связи будет иметь вид:
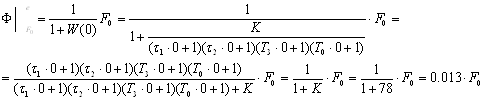
Тогда передаточная функция замкнутой системы принимает вид:

Найдём ошибку системы , величина которой равна ![]()
Ошибка по входу будет равна :
Ошибка по возмущению будет равна :
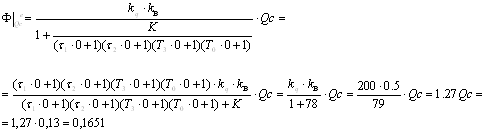
Общая ошибка будет равна : ![]()
Далее для оценки свойств системы воспользуемся пакетом прикладных программ
Control System Toolbox математического пакета MatLab.
Занесём в tf-форме передаточную функцию разомкнутой исходной системы в MatLab , обозначив её через Wr , для этого сначала введём передаточные функции звеньев и найдём их произведение :
>> w1=tf([78],[0.0016,1])
Transfer function:
78
------------
0.0016 s + 1
>> w2=tf([1],[0.3985,1])
Transfer function:
1
------------
0.3985 s + 1
>> w3=tf([1],[0.01,1])
Transfer function:
1
----------
0.01 s + 1
>> w4=tf([1],[0.7,1])
Transfer function:
1
---------
0.7 s + 1
>> Wr=w1*w2*w3*w4
Transfer function:
78
-------------------------------------------------------
4.463e-006 s^4 + 0.003253 s^3 + 0.2917 s^2 + 1.11 s + 1
Далее строим логарифмические амплитудные характеристики :
>> margin(Wr);grid on
Для определения устойчивости замкнутой системы автоматического управления построим годограф Найквиста от разомкнутой системы с помощью средств MatLab.(рис.5)
>> nyquist(Wr);grid on
Точка с координатами (0;-j) охватывается годографом, следовательно исходная система не устойчива.
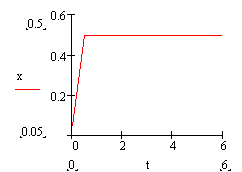
Чтобы оценить время переходного процесса и относительное перерегулирование , введём в нашу модель единичную обратную связь и построим график переходного процесса замкнутой исходной системы (рис.6)
>> f=tf([1])
Transfer function:
1
>> W=feedback(Wr,f)
Transfer function:
78
--------------------------------------------------------
4.463e-006 s^4 + 0.003253 s^3 + 0.2917 s^2 + 1.11 s + 79
>> step(W);grid on
Из графика (рис.6) видно , что время перехода равно 15 секунд , подобная скорость переходного процесса приемлема , но не желательна .
Относительное перерегулирование составляет приблизительно ![]() , что является слишком большим значением и превышает допустимое по условию задания (σ =5 %).
, что является слишком большим значением и превышает допустимое по условию задания (σ =5 %).
Оценив характеристики исходной системы , делаем вывод о том , что система требует доработки в виде дополнительного корректирующего устройства (регулятора)
5. Построение логарифмических амплитудно-частотных характеристик для исходной системы, желаемой и корректирующего звена .
Для построения ЛАЧХ используется стандартная сетка ,. По оси абсцисс откладывается угловая скорость в логарифмическом масштабе , т.е. наносятся отметки , соответствующие ![]() , а около отметок пишется само значение частоты
, а около отметок пишется само значение частоты ![]() в рад/с . Выбираем длину , равную 50мм . По оси ординат откладывается модуль в дБ.
в рад/с . Выбираем длину , равную 50мм . По оси ординат откладывается модуль в дБ.
Построим для нашей исходной системы так называемую асимптотическую ЛАЧХ ( см. приложение), представляющую собой совокупность отрезков прямых линий снаклонами , кратными величине 20 дБ/дек, а точки перегибов соответствуют десятичным логарифмам частот , равных величинам , обратным постоянным времени из передаточной функции.
Для построения исходной ЛАЧХ будем использовать передаточную функцию
![]()
![]()
![]() ;
; ![]() ;
;
![]()
![]()
Начальный уровень исходной ЛАЧХ будет равен :
![]()
Для построения желаемой ЛАЧХ необходимо найти желаемый передаточный коэффициент:
![]() ;
;
![]()
Из построенной желаемой ЛАЧХ определяем передаточную функцию разомкнутой желаемой системы :
![]() ,
,
![]()
Для построения ЛАЧХ корректирующего звена вычтем из желаемой ЛАЧХ исходную.
Передаточная функция регулятора имеет вид (см. приложение):
![]() , где
, где ![]()
где![]() ,
, ![]() ; (см. приложение)
; (см. приложение)
![]()
Произведём оценку точности и анализ качества скорректированной системы с помощью математического пакета МatLab.
>> g1=tf([49],[1,0])
Transfer function:
49
--
s
>> g2=tf([1],[0.01,1])
Transfer function:
1
----------
Похожие работы
... зефирной массы. Готовая масса по трубопроводу подается на отливку. 1.3 Постановка задачи В специальной части данного курсового проекта будет произведен расчет автоматизированной системы регулирования давления в камере взбивания. Для этого необходимо: 1 произвести анализ существующих систем управления; 2 разработать систему взбивания зефирной массы под давлением; 3 произвести ...
... камере понижается ниже допустимой , то в данном случае включаются электронагреватели , которые встроены в ВО. Включением и выключением поддерживают заданную температуру в камере. 3.2 Работа узлов функциональной схемы автоматизации холодильного модуля. Основной регулируемой величиной в данной схеме есть температура воздуха в холодильной камере. Ее регулируют включением и выключением КМ , а зимой ...
... отходы 1270,22 6,3511 2095,863 1,945 5. Потери 659,973 3,299865 1088,955 1 Итого 65997,3 329,9865 108895,5 100 4. Разработка контроля и автоматики технологического процесса производства поливинилхлорида Применение методов и средств автоматизации позволяет повысить производительность труда, уменьшить брак и потери. Конечной целью автоматизации является создание полностью ...
... запирается. Прикладывая и снимая такое критическое напряжение, электронную лампу можно использовать в качестве переключающего устройства. Исполнительные механизмы Терминология Исполнительное устройство системы регулирования – это устройство, воздействующее на процесс в соответствии с получаемой командой информацией. Эти устройства состоят из двух основных блоков (исполнительного механизма и ...
0 комментариев