Навигация
0.01 s + 1
>> g3=tf([1],[0.0016,1])
Transfer function:
1
------------
0.0016 s + 1
>> Gr=g1*g2*g3*g3
Transfer function:
49
-----------------------------------------------
2.56e-008 s^4 + 3.456e-005 s^3 + 0.0132 s^2 + s
>> margin(Gr);grid on
Запас по амплитуде увеличился почти в 9 раз и теперь составляет 17,3 дБ , запас по амплитуде составляет 57,8 градуса .
Введём в систему отрицательную обратную связь и оценим переходный процесс.
>> f=tf([1])
Transfer function:
1
>> G=feedback(Gr,f)
Transfer function:
----------------------------------------------------
2.56e-008 s^4 + 3.456e-005 s^3 + 0.0132 s^2 + s + 49
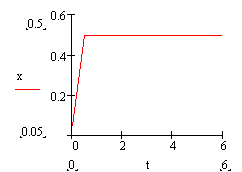
>> step(G);grid on
Из графика (рис.8)видно , что время перехода равно 0,15 секунды , а перерегулирование составляет примерно ![]() % , что не превышает заданных 5 %.
% , что не превышает заданных 5 %.
Проверим систему на устойчивость при помощи построения годографа Найквиста :
>> nyquist(Gr);grid on
Оценив характеристики скорректированной системы , делаем вывод :
сходящийся колебательный процесс (рис.8) и годограф Найквиста (рис.9) , не охватывающий точку (0,-j) свидетельствуют об устойчивости системы.
4. Синтез последовательного корректирующего звена
Структурная схема САУ при последовательной коррекции изображена на рис.10, где приняты следующие обозначения : W(s)-передаточная функция исходной системы ;
Wk(s)- передаточная функция корректирующего устройства .
Полагая , что передаточная функция скорректированной системы Wск(s) равна желаемой передаточной функции Wж(s) , можно записать
![]()
Реализация аналогового регулятора на пассивных RC-цепях.
Передаточная функция корректирующего звена имеет вид:
![]()
Т.к. ![]() , то данная ПФ может быть реализована при помощи схемы , изображённой на рис.11.
, то данная ПФ может быть реализована при помощи схемы , изображённой на рис.11.
Произведём расчёт сопротивлений и ёмкости , а так же коэффициента усиления дополнительного усилителя . Расчёт устройства производится по соотношениям :
![]()
![]() ;
; ![]()
Пусть ёмкость конденсатора равна 10 мкФ ( модель К15П-1)

По таблице номиналов выбираем близкие по значению резисторы модели С1-1 R1=39кОм , R2=160Ом
![]()
Чтобы сделать коэффициент регулятора равным 2,02 , подберём коэффициент усиления дополнительного усилителя Куд=112.
Найдём постоянные времени с учётом номиналов найденных реальных конденсатора и резисторов :
![]()
![]()
Таким образом передаточная функция регулятора примет вид :
![]()
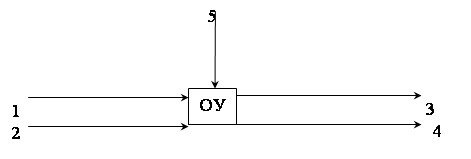
Реализация активного корректирующего звена на ОУ.
Принципиальная схема регулятора на ОУ приведена на рис.12.
Расчёт устройства производится по соотношениям :
![]()
![]()
![]()
Примем R1=10 кОм , тогда
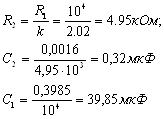
По таблице номиналов выбираем близкие по значению резисторы модели С1-1 и конденсаторы модели К15П-1 :
R2= 4,7 кОм ; С2= 0,33мкФ ; С1= 39мкФ
Цифровой регулятор может быть получен из передаточной функции корректирующего устройства путём перевода её в дискретную форму с помощью аппроксимации Тустена и последующей записи разностного уравнения .
В схеме изображённой на рис.13 сигнал , поступающий в АЦП (аналого-цифровой преобразователь) преобразуется из аналоговой формы в цифровую ( дискретную) путём квантования непрерывной величины по времени ,затем сигнал поступает в D(z) (цифровая вычислительная машина),где производятся вычисления согласно разностному уравнению , после чего сигнал поступает в ЦАП ( цифровой аналоговый преобразователь), где преобразуется из цифровой в аналоговую форму
Период дискретности примем равным 0,0008с., т.е. Тs=0,0008 c.
>> Wk=tf([0.563479,2.21897,2.02],[0.0016,1,0])
Transfer function:
0.5635 s^2 + 2.219 s + 2.02
---------------------------
0.0016 s^2 + s
>> Wkd=c2d(Wk,0.0008,'tustin')
Transfer function:
282.2 z^2 - 563.5 z + 281.3
---------------------------
z^2 - 1.6 z + 0.6
Sampling time: 0.0008
Преобразуем функцию в dsp-форму :
>> W=filt([282.2,-563.5,281.3],[1,-1.6,0.6],0.0008)
Transfer function:
282.2 - 563.5 z^-1 + 281.3 z^-2
-------------------------------
1 - 1.6 z^-1 + 0.6 z^-2
Sampling time: 0.0008
Получили передаточную функцию цифрового регулятора :
![]()
Теперь можно записать разностное уравнение в общем виде:
![]()
перемножив получим следующее:
![]()
Отсюда получаем следующее уравнение
![]()
Данное уравнение реализуется в виде компьютерной программы , и используется для управления цифровым контроллером ,который в свою очередь реализует коррекцию системы.
Заключение
В результате выполнения курсовой работы была выполнена задача синтеза корректирующего звена для исходной САР.
Для этого были решены следующие задачи: построена структурная схема нескорректированной системы и определены передаточные функции её звеньев, произведена оценка точности и анализ качества исходной системы (запаса устойчивости и быстродействия) с использованием пакета Control System Toolbox.
Также была построена желаемая ЛАЧХ, определены желаемые передаточные функции разомкнутой и замкнутой систем, после чего была произведена оценка показателей качества желаемой системы с использованием математического пакета MATLAB и синтез последовательного корректирующего устройства (регулятора), реализация корректирующего устройства в виде аналогового (активная и пассивная коррекции) и цифрового регуляторов , а также построение и описание функциональной схемы скорректированной системы (с приведением параметров САР и её показателей качества).
Физическая схема скорректированной САР приведена на рис. 22.
Спроектированная система автоматического регулирования устойчива и обладает показателями качества ,соответствующими требуемым в задании :перерегулирование ![]() 4 % .
4 % .
Список используемой литературы
1. Бесекерский В.А., Попов Е.П. Теория автоматического управления - Изд.. 4-е, перераб. И доп. - СПб, Изд-во «Профессия», 2003
2. Ерофеев А.А. Теория автоматического управления: Учебник для втузов. -2-е изд., перераб. И доп. - СПб.: Политехника, 2003. - 302с: ил.
3. Синтез следящей системы автоматического управления: Метод. Указания к курсовой работе. Сост. В.И. Будин, О.Б. Сигова, - Самара, СамГТУ, 2003.-20с.
4. Медведев В.С„ Потёмкин В.Т.Control System Toolbox. Matlab5 для студентов. - М.: ДИАЛОГ - МИФИ, 1999. - 287 с.
5. Лазарев Ю. Ф. Matlab5. х. - К.: Издательская группа ВНV, 2000. - 384с.
6. Дьяконов В.П. Simulink 4. Специальный справочник. - СПб: Питер, 2002. - 528с: ил.
7. Макаров И.М ., Менский Б.М. Линейные автоматические системы(справочный материал) -2-е изд., -М.: Машиностроение , 1982.-504с.,ил.
8. Ким Д.П. Теория автоматического управления. Т.1. Линейные системы.-
М.: ФИЗМАТЛИТ , 2003.-288 с.
Похожие работы
... зефирной массы. Готовая масса по трубопроводу подается на отливку. 1.3 Постановка задачи В специальной части данного курсового проекта будет произведен расчет автоматизированной системы регулирования давления в камере взбивания. Для этого необходимо: 1 произвести анализ существующих систем управления; 2 разработать систему взбивания зефирной массы под давлением; 3 произвести ...
... камере понижается ниже допустимой , то в данном случае включаются электронагреватели , которые встроены в ВО. Включением и выключением поддерживают заданную температуру в камере. 3.2 Работа узлов функциональной схемы автоматизации холодильного модуля. Основной регулируемой величиной в данной схеме есть температура воздуха в холодильной камере. Ее регулируют включением и выключением КМ , а зимой ...
... отходы 1270,22 6,3511 2095,863 1,945 5. Потери 659,973 3,299865 1088,955 1 Итого 65997,3 329,9865 108895,5 100 4. Разработка контроля и автоматики технологического процесса производства поливинилхлорида Применение методов и средств автоматизации позволяет повысить производительность труда, уменьшить брак и потери. Конечной целью автоматизации является создание полностью ...
... запирается. Прикладывая и снимая такое критическое напряжение, электронную лампу можно использовать в качестве переключающего устройства. Исполнительные механизмы Терминология Исполнительное устройство системы регулирования – это устройство, воздействующее на процесс в соответствии с получаемой командой информацией. Эти устройства состоят из двух основных блоков (исполнительного механизма и ...
0 комментариев