Навигация
Проектирование вертикального аппарата с приводом и мешалкой
17345
знаков
0
таблиц
2
изображения
Московская государственная академия тонкой химической технологии
им. М.В. Ломоносова
Кафедра прикладной механики и основ конструирования
Курсовой проект по курсу
"Прикладная механика и основы конструирования" на тему:
"Проектирование вертикального аппарата
с приводом и мешалкой"
Выполнил студент гр. 203 - Филатов И.Ю.
Консультант – доц. Степанчиков С.В.
Москва 2002
ПЛАН
Основные требования к аппаратам химического производства.
Расчет кинематической схемы привода.
Расчет червячной передачи.
Расчет клиноременной передачи.
Расчет конструирования ведомого вала редуктора.
Расчет выходного окончания ведомого вала.
Расчет ступицы колеса.
Расчет и выбор шпонки.
Выбор подшипников.
Расчеты конструирования крышек подшипников.
Расчет толщены стенок корпуса редуктора.
Расчет усилий зацепления. Условно-пространственная схема редуктора.
Расчет ведомого вала на выносливость.
Расчет и выбор муфты. Принцип работы муфты.
Допуски и посадки.
Расчеты элементов аппарата:
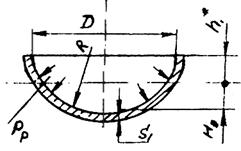
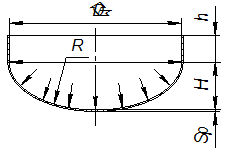
Расчет толщены стенок конического днища.
Расчет толщены обечайки.
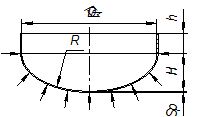
Расчет толщены стенок элептической крышки.
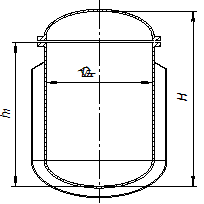
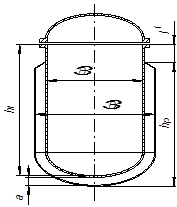
Определение высоты аппарата.
Расчет и выбор фланцевого соединения.
Выбор люка и штуцеров.
Опоры аппарата.
Сальниковое уплотнение.
Опора концевая вала мешалки.
Расчет и выбор предохранительного устройства.
Расчет сварных соединений.
1. Основные требования к аппаратам химического производства
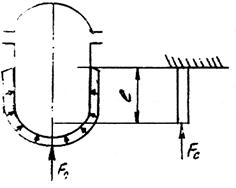
Во многих технологических процессах применяются емкостные аппараты, которые работают под давлением. Вертикальное исполнение толстостенных цилиндрических аппаратов следует предпочитать горизонтальными, т. к. в горизонтальных аппаратах появляется дополнительное изгибающее напряжение от силы тяжести самого аппарата и среды.
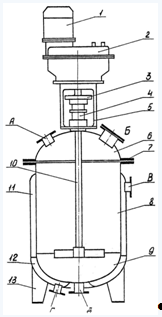
Вертикальные обечайки закреплены сверху и снизу крышкой и днищем. В отличие от днищ, имеющих с обечайкой неразъемное соединение, крышки являются съемными частями аппарата. Днища и крышки изготавливают из тех же материалов, что и обечайки. Присоединение к аппаратам крышек и в соединении раздельных частей осуществляется при помощи фланцев. Герметичность обеспечивается прокладкой. Присоединение к аппаратам трубопроводов и контрольно-измерительных приборов производится с помощью штуцеров. Для осмотра аппарата, его очистки, сборки и разборки внутренних устройств служат люки.
Установка аппаратов на фундаменте осуществляется при помощи лап и опор. Перемешивание жидких сред в аппарате производится механическим способом с помощью мешалок. Для приведения в обращение перемешивающих механических устройств служат приводы, состоящие из электродвигателей, редукторов, ременных передач и муфт. Редукторы устанавливаются на крышках вертикальных аппаратов при помощи стоек и опор. Вал мешалки вводится в аппарат через уплотнение для обеспечения герметичности. Уплотнение вала производится с сальниковым, либо с торцевым уплотнителем.
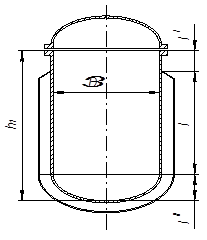
Жидкость из аппарата удаляется через нижний штуцер. Обогрев аппарата обычно осуществляется при помощи рубашек, диаметр которого принимают на 40-100 мм. больше диаметра аппарата. Аппаратура, работающая под давлением, повреждение которой может привести к несчастным случаям, должна отвечать требованиям Гостехнадзора и раз в три года подвергаться внутреннему осмотру, а раз в шесть лет гидравлическому испытанию.
2. Расчет кинематической схемы приводаИсходные данные: Р2 = 2,2 (кВт)
n2 = 80 (об. /мин)
Цель расчета:
1. Подобрать электродвигатель.
2. Определить общее передаточное отношение и разбить его на ступени.
3. Определение характеристики валов.
Расчет: 1. Определение требуемой мощности.
Ртреб = Р2 / hприв. = 2,2/0,79 = 3,16 (кВт)
hприв. = hкрп* hч. п. * h4подш = 0,95 * 0,85*0,99 = 0,79
hкрп = 0,95
hч. п = 0,85
hподш = 0,99 (ист.1; стр.5)
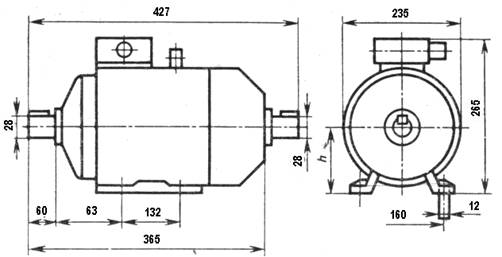
2. Выбор электродвигателя.
Рэ. д. > Pтреб (ист.1; стр.390)
3 кВт – Двигатель 4A100S2X3 S=4,3%
Маркировка: 4A90L2
4 – номер серии
А – асинхронный
90 – размер h (от лапок до центра валика)
X3 – маркеровочный размер
3 – число полюсов.
Мощность под нагрузкой (коэффициент скольжения)
nэд = nсинхр (1-S) = 3000 (1-0,043) = 2871
3. Определение общего передаточного отношения и разбивка его по ступеням.
Uåприв. = nэ. д. / n2 = 2871 / 80 = 16,667
Uåприв. = iк. р. п. * Uч. п. = 35,88
iк. р. п. = 1,5 – 3
Uч. п. = 12,5 (по ГОСТу ист.1 стр.53)
iк. р. п. = 1,33
4. Определение характеристик валов.
4.1. Вал электродвигателя.
Ртреб = 2,278 (кВт)
nэ. д. = 2871 (об. /мин)
Mэ. д. =9550*(Ртреб / nэ. д) = 20,12 (Н*м)
4.2. Ведущий вал.
Р1 = Ртреб *hкрп* hподш = 2,278*0,95*0,99=2,97 (кВт)
n 1= nэ. д. / iк. р. п = 2871 / 2,87 = 1125 (об. /мин)
М1 = 9550*(Р1 / n1) = 25,23 (Н*м)
4.3. Ведомый вал.
Р2 = Р1 * hч. п. * hподш =2,142*0,85*0,99=2,5 (кВт)
n2 = n 1 / Uч. п. = 1000,34 / 12,5 =90,0 (об. /мин)
М2 = 9550*(Р2 / n2) = 265,28 (Н*м)
3. Расчет червячной передачиИсходные данные: Крутящий момент на ведомом валу М2 =215,11 Н*м.
Uч. п. = 12,5.
Цель расчета:
1. Провести проектный расчет на выносливость по контактным напряжениям.
2. Провести проверочный расчет передачи по напряжениям изгиба.
1. Выбор материала червячного колеса.
По ист.1 стр.66 – Бр. А9Ж3Л
Бр. – бронза
А9 – алюминий 9%
Ж3 – железо 3%
Л – литье
Допускаемое напряжение [d-1F] =75 мПа.
[d-1F] = [d-1F] * KHL = 40,7 мПа, где KHL - коэффициент долговечности.
Vs = 2 – 4
[dн] =167 мПа
2. Определение числа заходов червяка и зубьев червячного колеса.
Число заходов червяка z1 принимаем в зависимости от придаточного отношения. По ист.1 стр.55:
z1 =4, если U=8-15
z1 =2, если U=15-30
z1 =1, если U>30.
 |
z2 = z1 * Uч. п. = 4*12,5=50 – число зубьев.
3. Определение межосевого расстояния из условия контактной прочности.
аw = (z2 /q + 1) 3Ö ((170/(z2 /q) * [dн])) 2 * Кн*М2) = 143,0 (мм)
q = 10 - коэф. диаметра червяка.
Кн = 1,25 – коэф. нагрузки.
4. Определение расчетного модуля зацепления.
m = t/p (мм) – модуль зацепления
m= 2*аw / z2 + q = 4,77 (мм) m= 5
5. Уточнение межосевого расстояния.
аw = m*(z2 +q) / 2 = 150 (мм)
6. Определение геометрических размеров передачи.
Основные размеры червяка:
Делительный диаметр d1=q*m=50 (мм)
Вершины витков червяка da = d1 +2m=60 (мм)
Диаметр впадин витков червяка df = d1 - 2,4*m = 38 (мм)
Длинна нарезной части червяка z1 =1 или 2, то b1 > (11+0,06z2) *m
z1 =3 или 4, то b1 > (12,5+0,09z2) *m
b1 = 85 (мм)
Делительный угол подъема γ= 21,8
Основные размеры венца червячного колеса.
Делительный диаметр червячного колеса d2 = z2*m=250 (мм)
Диаметр вершин зубьев червячного колеса da=d2 + 2m=260 (мм)
Диаметр впадин витков червячного колеса df = d1 - 2,4m = 238 (мм)
Наибольший диаметр червячного колеса daм<da+6m/(z1+2) = 265 (мм)
Ширина венца червячного колеса z = 1 – 3 b2 = 0,75*da
z = 4 b2 = 0,67*da
b2=0,67*260=174,2 (мм)
4. Расчет клиноременной передачиИсходные данные: Mэ. д. = 7,57 (Н*м)
nэ. д. = 2871 (об. /мин)
iк. р. п. = 2,87.
e = 0,015
Mэд=9550*(Ртр/nэд) Ртр=2,27
Цель расчета: Определить геометрические размеры клиноременной передачи.
1. Диаметр меньшего шкива.
d1=(3 – 4) 3ÖMэ. д. = 95,2
По ист.1 стр.120 берем d1= 100 (мм)
2. Диаметр большего шкива.
d2= iк. р. п. * d1(1-e) =124,39
d2= 125 (мм)
3. Уточнение передаточного числа.
iк. р. п. = d2/ d1(1-e) = 1,2
(2,87-2,86) / 2,86 = 0,34%
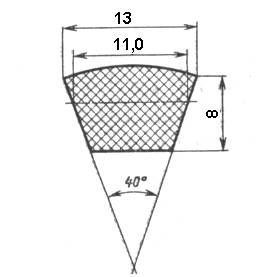
4. Сечение ремня.
5. Расчет межосевого расстояния.
amin= 0,55(d1+ d2) +T0=0,55(71+200) +6=131,75 (мм)
amax=(d1+ d2) *2 = 450 (мм)
ap=290,875 (мм)
6. Расчет длинны ремня.
L=2*ap+0,5*p*(d1+ d2) +(d1+ d2) 2/4*ap=935,79 (мм)
L=1000(мм)
7. Уточнение значения межосевого расстояния с учетом стандартной длинны ремня.
ap= 0,25((Lp-W) + Ö (Lp-W) 2-2y) = 323,13 (мм)
W= 0,5p(d1 - d2) =353,25 (мм)
y= (d1 - d2) 2 = 625 (мм2)
При монтаже передачи необходимо обеспечить возможное уменьшение
длинны межосевого расстояния на 0,01*Lp=9 (мм) и для обеспечения одевания ремня, возможно увеличение на 0,025 Lp=22,5 (мм)
8. Угол обхвата меньшего шкива.
a=1800-57((d2 - d1) / ap) =75,350
9. Коэффициент режима работ.
(По ист.1 стр.136 табл.7.10)
Cp=1,0
10. Коэффициент для клиноременных ремней.
(По ист.1 стр.135 табл.7,9)
СL=0,89
11. Коэффициент угла обхвата.
Ca=0,92
12. Коэффициент числа ремней в передаче.
Сz=0,95 z=2 – 3
Сz=0,90 z=4 – 6
z= Ртреб Cp / P0 СL Ca Сz = 2,6
P0 – мощность передачи 1 клинов. ремня
(по ист.1 стр.132) P0 = 1,05 (кВт)
z=3
13. Натяжение ветви клинового ремня.
F0=(W0 Ртреб Cp СL /Ca z V) +qV2=156,9 (Н)
V=0,5 Wэд d1=5,89 (м/с)
Wэд =p*nэд/30=300,5 (рад/сек)
q=0,1
15. Давление на валы.
Fв= F0 z Sin (a1/2) =627,15 (Н)
16. Ширина штивов.
Вш=(z-1) e+2f= 50 (мм) (по ист.1 стр.138. табл.7,12)
5. Расчет конструирования ведомого вала редуктораИсходные данные: М2=215,11 (Нм)
m=5
1. Расчет выходного окончания ведомого вала.
Условие прочности на кручении: τ = Mкр/Wp < [τ]
Wp=0,2d3=14817,6 (мм)
[τ] = 15 – 20 (мПа)
db2> М2 / [τ] *0,2 = 38,6 (мм)
db2= 42 (мм)
τ =13,663 < [τ]
2. Расчет ступицы колеса.
dст= (1,6 – 1,8) db2= 71,4 (мм)
lст= (1,4 – 1,6) db2= 63 (мм)
3. Расчет и выбор шпонки.
Для соединения вала с деталями передающими крутящий момент применяются призматические шпонки из стали, имеющие δ13>600(мПа).
lшп= lст-(5 – 10)
lшп=53 – 58 = 56 (мм)
Расчет усилий, действующих на шпонку.
Рсм=2М/d
Fсм=(h-t1) lраб
lраб=l – b
δсм= Рсм /Fсм=2М2 /(h-t1) (l – b) d2< [δсм] =80 (мПа)
δсм=76,515 < [δ] (мПа)
Проверка на недогрузку
[δсм] - δсм / [δсм] = 4,356% < 15%
Проверка на срез.
Площадь среза: Fср= bl
τср=2М2 / l b db2 < [τср]
[τср] =0,6 [δсм] =48(мПа)
τср=14,346 (мПа)
τср < [τср]
4. Подбор подшипников.
Будем использовать радиально-упорные однорядные шарикоподшипники. Радиально-упорные однорядные шарикоподшипники воспринимают комбинированные радиальные и осевые нагрузки. Осевая грузоподъем – ность зависит от угла контакта.
α=12, 26, 360
С увеличением α этого угла осевая нагрузка возрастает за счет радиальной. Эти подшипники способны воспринимать осевые нагрузки только в одном направлении, поэтому для фиксации вала в обе стороны их устанавливают попарно.
Принимаем подшипники 36210
3 – α=12
6 – характер восприятия нагрузки; радиально-упорный
2 – серия легкая
10 – d=10 5 = 50 (мм)
5. Расчет и конструирование крышек подшипников.
Крышки закрывают подшипниковый узел и припятствуют попадания в него масла из редуктора и грязи.
Основным критерием выбора крышки под подшипник является dкрыш=Dподш.
Используем крышки прижимные низкие с канавкой под уплотнительное кольцо и прижимные под манжетное уплотнение.
Похожие работы
... Мощность на валу электродвигателя – Вт, где h - коэффициент полезного действия привода h = 0,9 ¸ 0,95. Принимаем h = 0,92 8. ВЫБОР ПРИВОДА ПЕРЕМЕШИВАЮЩЕГО УСТРОЙСТВА По таблице 32.1 [5, стр.725] предварительно выбираем вертикальный привод, тип 1.4. Далее по мощности на валу электродвигателя и угловой скорости вращения вала мешалки определяем типоразмер мотор-редуктора ...
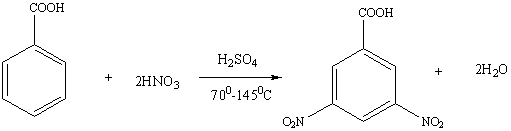
... операционный баланс будет равен суточному балансу. Производительность проектируемого производства составляет 13 тонн/год. Предполагается, что проектируемое производство будет работать 237 дней в году. Из этих данных определяем суточную производительность проектируемого объекта: т готовой динитробензойной кислоты. Таблица №12 Операционный материальный баланс стадии нитрования Приход кг ...
... 1. Лащинский А.А., Толчинский А.Р. Основы конструирования и расчета химической аппаратуры. Справочник. -Л.: / Машиностроение, 1970. -750с. 2. Прикладная механика. Курсовой проект. Аппарат вертикальный с механическим перемешивающим устройством / Сост.: Герасимов В.К., Лихачев А.И. - Рубежное: ИХТ ВНУ, 2008. -60 с. 3. ГОСТ 14249-89. Сосуды и аппараты. Нормы и методы расчета на прочность. - М.: ...
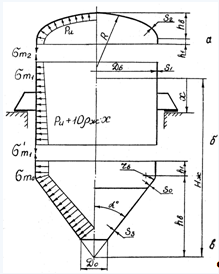
... , составляющих корпус аппарата, при нагружении его газовым и гидростатическим давлениями, приведены на рис. 1.2. Рис. 1.2. Расчетные схемы элементов корпуса, нагруженного внутренним давлением: а - крышка аппарата; б - обечайка аппарата; в - днище аппарата. 1.1.3.1 Определение толщины стенки обечайки Толщину стенки цилиндрической обечайки аппарата в соответствии с рис. 1.3 определяем по ...
0 комментариев