Навигация
Принципиальная электрическая схема драйвера управления
35580
знаков
30
таблиц
22
изображения
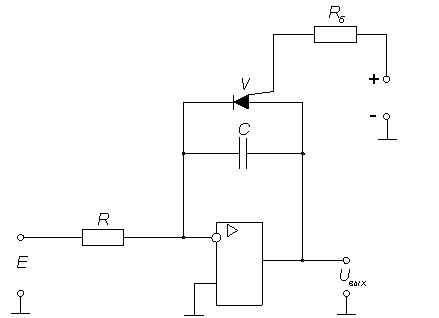
3.5 Принципиальная электрическая схема драйвера управления
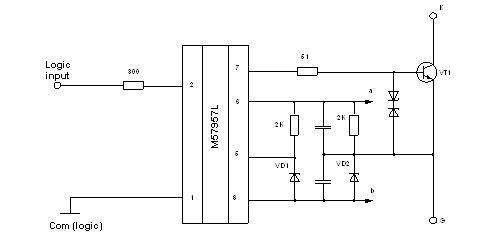
Рисунок 3.4 Драйвер управления
4. Расчет схемы замещения
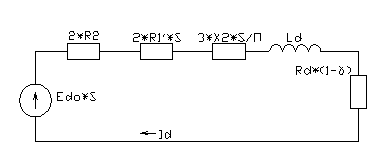
Упрощенная эквивалентная схема замещения двигателя постоянного тока приведена на рисунке 4.1
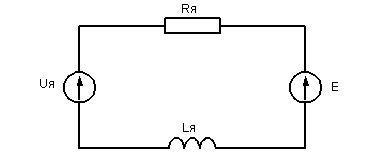
Рисунок 4.1 Схема замещения двигателя
Определим номинальную скорость вращения якоря исходя из каталожного значения частоты вращения
 ; (4.1)
; (4.1)
![]() рад/с;
рад/с;
Активное сопротивление якорной обмотки:
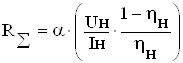 ; (4.2)
; (4.2)
где ![]() для двигателей постоянного тока независимого возбуждения;
для двигателей постоянного тока независимого возбуждения;
![]() для двигателей постоянного тока смешанного возбуждения.
для двигателей постоянного тока смешанного возбуждения.
![]() для двигателей постоянного тока последовательного возбуждения.
для двигателей постоянного тока последовательного возбуждения.
Принимаем ![]()
Индуктивность обмотки якоря определяется в соответствии с формулой Уманского:
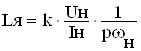 ; (4.3)
; (4.3)
где k = 0.2 – 0.25 для компенсированных машин;
k = 0.5 – 0.6 для некомпенсированных машин.
Принимаем k = 0.25
![]() Гн;
Гн;
Момент инерции для машины постоянного тока составляет
![]() кг м2(4.4)
кг м2(4.4)
![]() ;
;
Номинальный коэффициент потока
 ; (4.5)
; (4.5)
![]()
![]() ;
;
Таблица 4.1 Параметры двигателя
| Параметры двигателя | |
| Тип двигателя | ДПУ 240 1100 3 Д4109 |
| Номинальная мощность |
|
| Номинальное напряжение | Uн = 110 В |
| Номинальный ток | IН = 12.5 А |
| Номинальный момент | MН = 3.5 н м |
| Номинальная частота вращения якоря | nн = 3000 об/мин |
| Активное сопротивление якорной обмотки |
|
| Индуктивность обмотки якоря |
|
| Момент инерции |
|
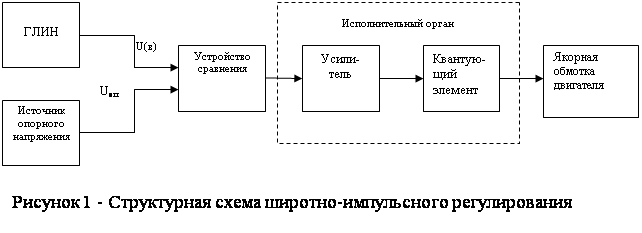
5. Статические характеристики системы ШИП – ДПТ
В проектируемом лабораторном стенде напряжение подаваемое на якорь двигателя подается импульсным методом, когда двигатель периодически подключается к источнику питания и отключается от него. При широтно-импульсном регулировании период коммутации “Tk” остается постоянным, а изменяется время “t0” замкнутого состояния ключа скважность ![]()
Среднее значение напряжения на якоре при ШИМ равно:
 ; (5.1)
; (5.1)
Уравнение механической характеристики двигателя для средних значений угловой скорости и момента имеет вид:
 ; (5.2)
; (5.2)
Механическая характеристика будет представлять собой семейство характеристик при изменяющемся значении скважности ![]() . Зависимости
. Зависимости ![]() при разных значениях скважности сведены в таблицах.
при разных значениях скважности сведены в таблицах.
Таблица 5.1 Зависимость ![]() при
при ![]()
|
| 0 | 50 | 100 | 150 | 200 | 250 | 314 |
| М | 13.5 | 11.84 | 10.22 | 8.6 | 6.99 | 5.32 | 3.4 |
Таблица 5.3 Зависимость ![]() при
при ![]()
|
| 0 | 50 | 100 | 130 | 180 | 220 | 250 |
| М | 8.07 | 6.45 | 4.84 | 3.84 | 2.25 | 0.96 | 0 |
Таблица 5.4 Зависимость ![]() при
при ![]()
|
| 0 | 40 | 70 | 100 | 120 | 140 | 166 |
| М | 5.38 | 4.1 | 3.11 | 2.15 | 1.5 | 0.86 | 0 |
Таблица 5.5 Зависимость ![]() при
при ![]()
|
| 0 | 15 | 30 | 50 | 60 | 70 | 83 |
| М | 2.69 | 2.2 | 1.72 | 1.07 | 0.75 | 0.43 | 0 |
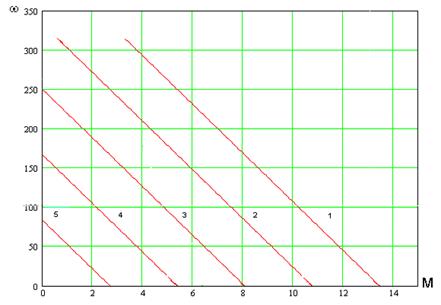
Рисунок 5.1 Механические характеристики
Уравнение скоростной характеристики двигателя для средних значений угловой скорости и момента имеет вид:
![]() ; (5.3)
; (5.3)
Скоростная характеристика будет представлять собой семейство характеристик при изменяющемся значении скважности ![]() . Зависимости
. Зависимости ![]() при разных значениях скважности сведены в таблицах.
при разных значениях скважности сведены в таблицах.
Таблица 5.6 Зависимость ![]() при
при ![]()
|
| 0 | 60 | 120 | 180 | 240 | 300 | 440 |
| I | 54 | 46.8 | 39.5 | 32 | 24.8 | 17.5 | 0 |
Таблица 5.7 Зависимость ![]() при
при ![]()
|
| 0 | 90 | 135 | 180 | 225 | 270 | 354 |
| I | 43.3 | 32.4 | 27 | 21.3 | 15.8 | 10.3 | 0 |
Таблица 5.8 Зависимость ![]() при
при ![]()
|
| 0 | 66 | 99 | 132 | 165 | 199 | 265 |
| I | 32.5 | 24.4 | 20.4 | 16.4 | 12.3 | 8.2 | 0 |
Таблица 5.9 Зависимость ![]() при
при ![]()
|
| 0 | 25 | 50 | 75 | 100 | 125 | 177 |
| I | 21.7 | 18.6 | 15.6 | 12.5 | 9.4 | 6.4 | 0 |
Таблица 5.10 Зависимость ![]() при
при ![]()
|
| 0 | 13 | 26 | 39 | 52 | 65 | 88 |
| I | 10.8 | 9.24 | 7.6 | 6 | 4.4 | 2.88 | 0 |
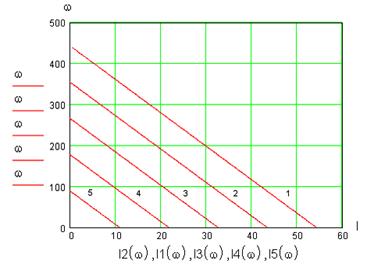
Рисунок 5.2 Скоростные характеристики
Уравнение для механических и скоростных характеристик в относительных единицах имеет вид:
![]() ; (5.4)
; (5.4)
где 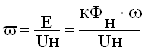 относительная скорость двигателя;
относительная скорость двигателя;
![]() относительный ток якоря;
относительный ток якоря;
Графически механические характеристики системы ШИП – ДПТ представляют собой семейство прямых с постоянным углом наклона к оси абсцисс, пересекающих ось ординат при ![]() , где прямые 1, 2, 3, 4 и 5 соответствуют характеристикам при значениях скважностей 1, 0.8, 0.6, 0.4 и 0.2 соответственно.
, где прямые 1, 2, 3, 4 и 5 соответствуют характеристикам при значениях скважностей 1, 0.8, 0.6, 0.4 и 0.2 соответственно.
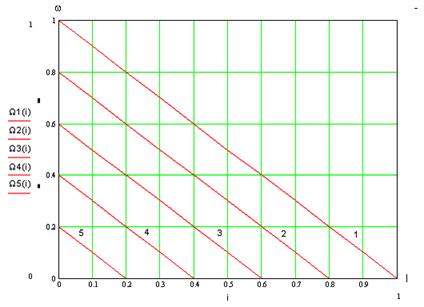
Рисунок 5.3 Скоростные характеристики в относительных единица
6. Выбор силовых элементов 6.1 Выбор силового трансформатора
При выборе силового трансформатора необходимо учесть величину напряжения имеющегося в аудитории, а также требуемую величину напряжения на двигателе с учетом коэффициента передачи однофазного выпрямителя. В аудитории 2411 электрическая сеть выдает линейное напряжение 220 В, которое и должно быть номинальным напряжением первичной обмотки выбираемого трансформатора. С учетом коэффициента передачи выпрямителя по напряжению, для данного типа выпрямителей равного Ku = 0.9, напряжение на вторичной обмотке должно быть не менее 122 В.
Также должна быть учтена и мощность двигателя, которая не должна превышать мощности трансформатора. Исходя из этих условий выбираем наиболее близкий по параметрам силовой трансформатор ОСМ - 0.16
Таблица 6.1. Параметры трансформатора
| Номинальное напряжение первичной обмотки | U1 = 220 В |
| Номинальное напряжение вторичной обмотки | U2= 130 В |
| Ток короткого замыкания | Iкз = 23 А |
| Номинальная мощность | Pном = 160 ВА |
Выбор транзистора и обратного диода рассмотрен на упрощенной схеме лабораторного стенда представленной на рисунке 6.1
Рисунок 6.1 Упрощенная схема лабораторного стенда.
Принцип действия:
Когда транзистор VT отперт от источника питания потребляется энергия. При запирании транзистора VT ток нагрузки за счет Э.Д.С. самоиндукции сохраняет свое прежнее направление, замыкаясь через обратный диод VD.
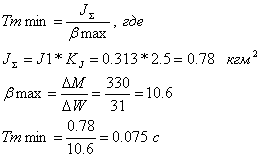
6.2 Выбор силового транзистораВыбор транзистора производим по максимально возможному току протекающему через него, а также поскольку наш транзистор работает в ключевом режиме то при выборе также необходимо учесть допустимую частоту коммутации ключа.
Определим постоянную времени двигателя.
 ; (6.1)
; (6.1)
![]() ;
;
превышать величины эквивалентной постоянной времени двигателя и составляет 1/5 – 1/7 часть ее значения.
![]() ; (6.2)
; (6.2)
![]() ;
;
Определим максимально возможный ток протекающий через якорную цепь двигателя. Им является ток короткого замыкания цепи который определяется из соотношения:
 ; (6.3)
; (6.3)
![]() A;
A;
В соответствии с полученными параметрами периода коммутации и максимального тока по каталожным данным выбираем тип транзистора IGBT IRG4PC 40UD
Таблица 6.2 Параметры транзистора
| Максимально допустимое напряжение | Umax = 600 В |
| Максимально допустимый ток | Imax = 40 А |
| Максимальная частота переключения | fmax = 40 кГц |
| Диапазон рабочих температур | T = - 55 ÷ +150 oC |
Выбор диода производим из условия что ток через него будет протекать лишь в случае запертого состояния транзистора. В случае вышеприведенной схемы выбор можно произвести по нескольким параметрам: максимальному току, максимальному напряжению и времени проводимости:
При выборе диода по максимальному напряжению необходимо учесть момент когда это напряжение достигнет максимального значения. Максимальным напряжением на диоде будет величина максимальной ЭДС двигателя которая достигнет своего наибольшего значения при номинальной величине угловой скорости, и определяется из выражения:
![]() ; (6.4)
; (6.4)
![]() В;
В;
Максимальный ток который может замкнуться на диод определяется из выражения:
 ; (6.4)
; (6.4)
![]() А;
А;
При выборе диода по времени проводимости необходимо определить максимальное время проводимости. Максимальным временем проводимости диода будут промежутки времени когда транзистор формирует импульсы минимальной скважности. То есть с уверенностью можно сказать что время проводимости диода не может быть больше периода коммутации ключа ![]() с.,
с.,
Таблица 6.3 Параметры обратного диода
| Максимально допустимый прямой импульсный ток | Iи. пр. max= 60 А |
| Максимально допустимое обратное импульсное напряжение | Uи. обр= 400 В |
| Максимальная частота | f = 50 кГц |
7. Расчет преобразователя
При работе нереверсивного ШИП на якорь двигателя постоянного тока возможны два режима: непрерывных токов якоря и прерывистых токов якоря. Режим прерывистых токов якоря может возникнуть при весьма малых нагрузках, когда период переключения рабочего вентиля соизмерим с постоянной времени цепи нагрузки. Во избежание прерывистых токов для данной системы частота коммутации ключом ранее была принята равной 1/5 части эквивалентной постоянной времени двигателя. Исходя из этого, считаем, что в исследуемой системе исключено появление прерывистых токов естественным путем, и в дальнейшем этот режим работы рассмотрен не будет.
Основным режимом является режим непрерывных токов. Учитывая параметры силового трансформатора можно определить относительное время проводимости ключа, при котором среднее напряжение на якоре двигателя было бы равно номинальному ![]() В.
В.
Так как со вторичной обмотки трансформатора снимаемое напряжение равно ![]() В, и с учетом коэффициента передачи выпрямителя по напряжению равного
В, и с учетом коэффициента передачи выпрямителя по напряжению равного ![]() , то напряжение на преобразователе будет равно:
, то напряжение на преобразователе будет равно:
![]() ; (7.1)
; (7.1)
![]() В.
В.
Зная напряжение на преобразователе можно определить требуемую скважность.
![]() ; (7.2)
; (7.2)
![]() ;
;
Максимальное и минимальное значение тока якоря в установившихся
 ; (7.3)
; (7.3)
 ; (7.4)
; (7.4)
Где коэффициенты a1 и b1 определяются следующим образом
 (7.5)
(7.5)
 (7.6)
(7.6)
Расчетные значения коэффициентов a1, b1 и IMAX сведены в таблицах
Таблица 7.1 Значения коэффициентов а1 и b1
|
| 0 | 0.2 | 0.4 | 0.6 | 0.8 | 1 |
|
| 0.819 | 0.819 | 0.819 | 0.819 | 0.819 | 0.819 |
|
| 1 | 1.041 | 1.083 | 1.127 | 1.174 | 1.121 |
Таблица 7.2 Значения максимального тока якоря
|
| 0 | 0.2 | 0.4 | 0.6 | 0.8 | 1 |
| Imax | 0 | 11.7 | 23 | 33.8 | 44 | 54 |
Для номинального режима  ;
;
 ;
;
![]() А;
А;
![]() А;
А;
Амплитуда пульсаций тока якоря:
 ; (7.7)
; (7.7)
Таблица 7.3 Амплитуда пульсаций тока якоря
|
| 0 | 0.2 | 0.4 | 0.6 | 0.8 | 1 |
|
| 0 | 0.153 | 0.230 | 0.230 | 0.153 | 0 |
Для номинального режима:
![]() А;
А;
Из (7.7) следует, что амплитуда пульсаций тока якоря, при заданных параметрах цепи нагрузки, зависит от времени включенного состояния
и частоты переключения транзистора и уменьшается с увеличением частоты переключения при заданном времени выключенного состояния транзистора.
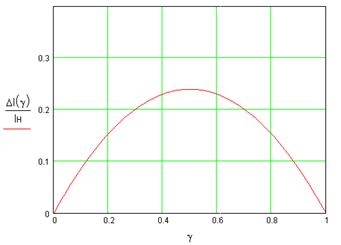
Рисунок 7.1 Амплитуды пульсаций тока якоря
Среднее значение тока транзистора
 ; (7.8)
; (7.8)
 А;
А;
Таблица 7.4 Среднее значение тока транзистора при скважности ![]()
|
| 0 | 55 | 110 | 165 | 220 | 275 | 330 | 385 | 440 |
| IТ. СР | 54 | 47.4 | 40.7 | 34 | 27 | 20.5 | 13.8 | 7 | 0 |
Таблица 7.5 Среднее значение тока транзистора при скважности ![]()
|
| 0 | 45 | 90 | 135 | 180 | 225 | 270 | 315 | 354 |
| IТ. СР | 43 | 38.7 | 34.4 | 30 | 25.5 | 21 | 16.7 | 12.4 | 8.5 |
Таблица 7.6 Среднее значение тока транзистора при скважности ![]()
|
| 0 | 33 | 66 | 99 | 132 | 165 | 198 | 231 | 265 |
| IТ. СР | 32.3 | 29.8 | 27.4 | 25 | 22.6 | 20.1 | 17.7 | 15.3 | 12.8 |
Таблица 7.7Среднее значение тока транзистора при скважности ![]()
|
| 0 | 22 | 44 | 66 | 88 | 110 | 132 | 154 | 177 |
| IТ. СР | 21.4 | 20.3 | 19.3 | 18.2 | 17.1 | 16 | 15 | 13.9 | 12.8 |
Таблица 7.4 Среднее значение тока транзистора при скважности ![]()
|
| 0 | 12 | 24 | 36 | 48 | 60 | 72 | 84 | 90 |
| IТ СР. | 10.7 | 10.4 | 10 | 9.8 | 9.5 | 9.2 | 8.9 | 8.6 | 8.4 |
Среднее значение тока обратного диода
 ; (7.9)
; (7.9)
Для номинального режима работы:

Таблица 7.5 Среднее значение тока обратного диода при ![]()
|
| 0 | 45 | 90 | 135 | 180 | 225 | 270 | 315 | 354 |
| IД. СР | 8.7 | 7.5 | 6.5 | 5.4 | 4.3 | 3.2 | 2 | 0.9 | 0 |
Таблица 7.6 Среднее значение тока обратного диода при ![]()
|
| 0 | 33 | 66 | 99 | 132 | 165 | 198 | 231 | 265 |
| IД. СР | 13 | 11.4 | 9.7 | 8.1 | 6.5 | 4.9 | 3.3 | 1.7 | 0 |
Таблица 7.7 Среднее значение тока обратного диода при ![]()
|
| 0 | 22 | 44 | 66 | 88 | 110 | 132 | 154 | 177 |
| IД. СР | 13 | 11,4 | 9.7 | 8.1 | 6.5 | 4.9 | 3.3 | 1.7 | 0 |
Таблица 7.8 Среднее значение тока обратного диода при ![]()
|
| 0 | 12 | 24 | 36 | 48 | 60 | 72 | 84 | 90 |
| IД. СР | 8.7 | 7.5 | 6.3 | 5.1 | 3.9 | 2.8 | 1.6 | 0.4 | 0 |
Зависимость среднего действующего тока в обратном диоде от относительной длительности включения транзистора представлена на рисунке 7.2
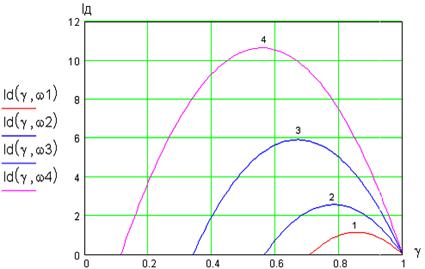
Рисунок 7.2 Зависимость среднего действующего тока в диоде от скважности.
Где кривая “1” – при скорости 314 рад/с;
кривая “2” – при скорости 250 рад/с;
кривая “3” – при скорости 150 рад/с;
кривая “4” – при скорости 50 рад/с.
8. Расчет энергетических характеристик
Потери в двигателе складываются из переменных, зависящих от нагрузки, и постоянных потерь, не зависящих от нагрузки.
Мощность потребляемая двигателем равна:
 ; (8.1)
; (8.1)
где ![]() Вт - номинальная мощность двигателя.
Вт - номинальная мощность двигателя.
![]() Вт;
Вт;
![]() Вт;
Вт;
Потери мощности в якоре двигателя определяются из выражения:
![]() ; (8.2)
; (8.2)
![]() Вт;
Вт;
Номинальные потери в двигателе:
![]() ; (8.3)
; (8.3)
![]() Вт;
Вт;
Механические потери двигателя постоянного тока составляют 0.5% от номинальных потерь:
![]() ; (8.4)
; (8.4)
![]() Вт;
Вт;
Потери в стали:
![]() (8.5)
(8.5)
Для построения зависимости ![]() и
и ![]() можно воспользоваться (4.2) преобразовав ее следующим образом:
можно воспользоваться (4.2) преобразовав ее следующим образом:
![]() ;
;
![]() ;
;
![]() ; (8.6)
; (8.6)
![]() ; (8.7)
; (8.7)
![]() ; (8.8)
; (8.8)
![]() ; (8.9)
; (8.9)
![]() ; (8.10)
; (8.10)
![]() ; (8.11)
; (8.11)
Расчетные значения функции ![]() представлены в таблице 8.1
представлены в таблице 8.1
Таблица 8.1 Расчет функции ![]()
|
| 417 | 360 | 314 | 250 | 200 | 120 | 70 |
|
| 1 | 0.69 | 0.55 | 0.43 | 0.37 | 0.3 | 0.26 |
В графической форме расчет значений ![]() изображен на рисунке 8.1
изображен на рисунке 8.1
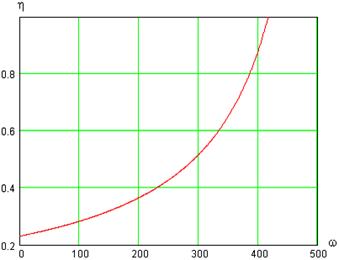
Рисунок 8.1 Зависимость К.П. Д от скорости
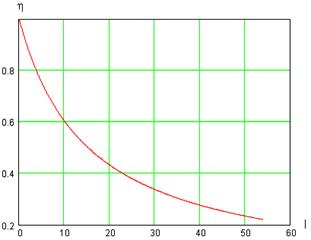
Расчетные значения функции ![]() представлены в таблице 8.2
представлены в таблице 8.2
Таблица 8.2 Расчет функции ![]()
|
| 0 | 3 | 7 | 12.5 | 25 | 40 | 51 |
|
| 1 | 0.84 | 0.69 | 0.55 | 0.38 | 0.28 | 0.23 |
В графической форме расчет значений ![]() изображен на рисунке 8.2
изображен на рисунке 8.2
9. Математическая модель системы ШИП – ДПТ
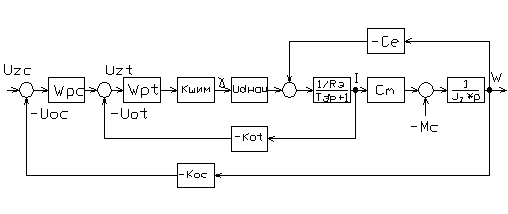
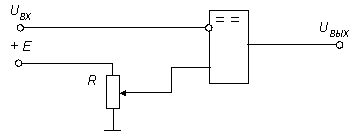
Математической моделью системы ШИП – ДПТ для плавного пуска будет являться модель обычного ДПТ, с той лишь разницей, что на якорь напряжение должно подаваться импульсами с возрастающей скважностью. Моделью системы может быть модель представлена на рисунке 1 выполнена в пакете “Matlab”
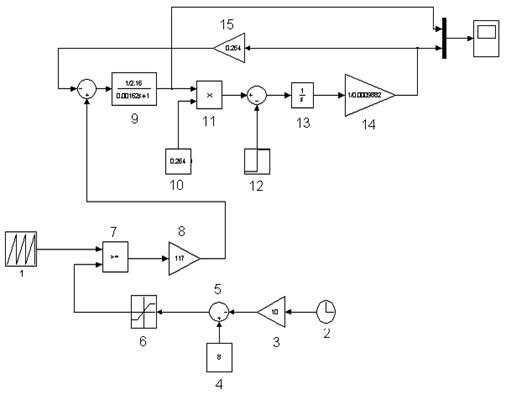
Рисунок 1 Модель системы ШИП – ДПТ
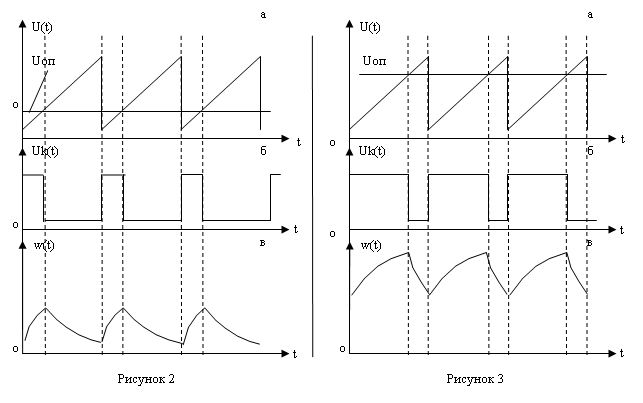
Генератор пилообразных колебаний “1” вырабатывает колебания пилообразной формы с периодом равным периоду коммутации транзистора ![]() , и амплитудой равной “10” форма которых представлена на рисунке 2.
, и амплитудой равной “10” форма которых представлена на рисунке 2.
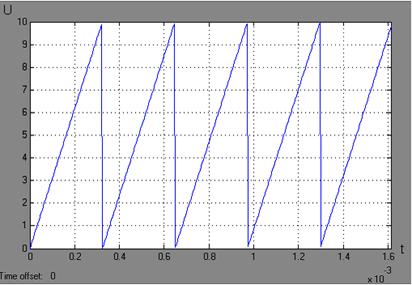
Рисунок 2 Сигнал 1 на входе компаратора
Блоки “2” и “3” формируют возрастающую во времени функцию, наклон которой может регулироваться изменением коэффициента блока “3”. В нашем случае коэффициент должен быть равным амплитуде пилообразных колебаний.
Предполагается, что формирование импульсов происходит с минимального значения скважности принятого, например, ![]() . Изменять начальную скважность можно изменяя значение блока “4”. С возрастанием времени будет уменьшаться разность функций после сумматора “5”. Ограничение этого разностного сигнала с помощью блока ограничения “6” на уровне равном “0.6”, позволит в дальнейшем получить рассчитанную ранее номинальную скважность
. Изменять начальную скважность можно изменяя значение блока “4”. С возрастанием времени будет уменьшаться разность функций после сумматора “5”. Ограничение этого разностного сигнала с помощью блока ограничения “6” на уровне равном “0.6”, позволит в дальнейшем получить рассчитанную ранее номинальную скважность ![]() .
.
Вид полученного разностного сигнала с ограничением на уровне “0.6” представлен на рисунке 3.
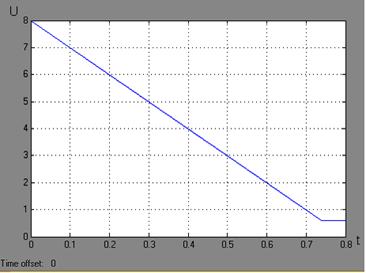
Рисунок 3 Сигнал 2 на входе компаратора
Этот сигнал поступает на вход компаратора “7” совместно с сигналом от блока пилообразных колебаний. На компараторе эти два сигнала сравниваются, и в моменты времени когда функции оказываются равными, компаратор “7” на выходе выдает единичный импульс. Сигнал с выхода компаратора показан на рисунке 3. Рассмотрен не все время пуска, а только три периода коммутации ключа ввиду сильного загромождения графика.
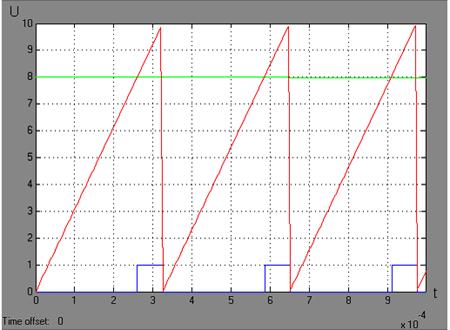
Рисунок 4 Формирование импульсов.
С помощью усилителя “8” полученные импульсы усиливаются до величины требуемого напряжения ![]() В.
В.
Модель двигателя постоянного тока применяется стандартной и подробно описываться не будет. Данные для моделирования ДПТ берутся из расчета схемы замещения. Блок “9” является передаточной функцией Uя=>Iя. Далее полученный ток умножается на блоке умножения “11” с потоком полученным с блока “10”. Полученный в результате умножения момент складывается на сумматоре с моментом сопротивления имеющим отрицательный знак. Во избежание захода скорости в отрицательную область в начальные моменты времени, момент сопротивления подается лишь после достижения двигателем номинальной скорости. Это реализовано с помощью блока “12”. Блоки “13” и “14” являются передаточной функцией вида М-Мс=>![]() . Противо-Э.Д.С. определяется умножением угловой скорости
. Противо-Э.Д.С. определяется умножением угловой скорости ![]() на поток в блоке “15”. Сравнение угловых скоростей и токов якоря при прямом и плавном пуске для одного и того же двигателя графически представлено на рисунке 5
на поток в блоке “15”. Сравнение угловых скоростей и токов якоря при прямом и плавном пуске для одного и того же двигателя графически представлено на рисунке 5
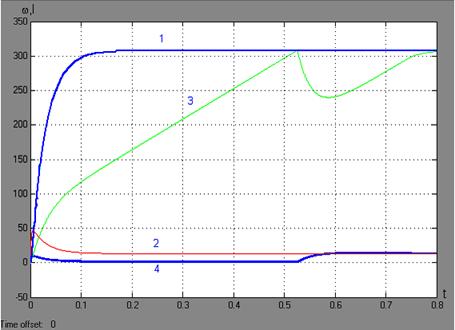
Рисунок 5 Ток и скорость при разных пусках
где кривая “1” - график изменения угловой скорости от времени при прямом пуске;
кривая “2” - график изменения тока якоря от времени при прямом пуске;
кривая “3” - график изменения угловой скорости от времени при плавном пуске;
кривая “4” - график изменения тока от времени при плавном пуске;
Время пуска можно увеличивать или уменьшать, изменяя соответствующим образом значение коэффициента блока “3”.
ВЫВОД
В ходе выполнения курсового проекта была произведена оценка эффективности использования широтно-импульсных преобразователей для промышленности и других отраслей народного хозяйства, а также возможность применения ШИП для плавного пуска двигателя.
В процессе работы были разработаны принципиальная, функциональная схемы проектируемого стенда, а также разработана и смонтирована система управления силовым транзистором на базе микроконтроллера PIC 16F 877. Рассчитаны и выбраны силовые элементы цепи, рассчитана схема замещения, построены статические и энергетические характеристики, а также методом математического моделирования в пакете “Matlab” получена модель системы ШИП – ДПТ. На основании полученных динамических характеристик сделаны выводы относительно разности прямого и плавного пуска.
Похожие работы
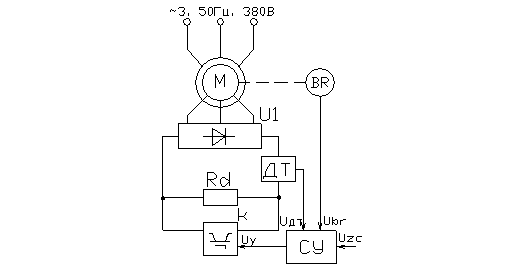
... : Ом О Исходя из задания, силовой канал представляем следующим образом (рис.1): рис.1. На представленной схеме: М – асинхронный двигатель с фазным ротором; BR – тахогенератор; U1 – трехфазный мостовой выпрямитель, включенный в цепь ротора; ДТ – датчик тока; Rd – добавочное сопротивление, шунтированное ключом с частотой коммутации fk=3кГц; К – коммутатор; СУ – система управления. ...
... импульсов tu при неизменном среднем моменте на валу двигателя. В зависимости от соотношения электромагнитной постоянной времени обмотки якоря tя и величины Тu, от схемы управления, момента нагрузки и тока в цепи якоря возможны два основных режима работы двигателя при импульсном управлении: режим прерывистого тока и режим непрерывного тока. Режим прерывистого тока возможен при tя< Тu и ...
... приобрели навыки для решения инженерных задач по расчету и проектированию систем автоматизированного электропривода в статических и динамических режимах, а так же навыков расчета параметров в программном пакете Mathcad и моделирования в программном пакете Matlab Simulink системы электропривода «преобразователь частоты-асинхронный двигатель». В ходе разработки электропривода мы достигли диапазона
... особенностью машины постоянного тока является наличие коллектора и скользящего контакта между обмоткой якоря и внешней электрической цепью. 2.2 Устройство машины постоянного тока Машина постоянного тока (рис. 2.3) по конструктивному исполнению подобна обращенной синхронной машине, у которой обмотка якоря расположена на роторе, а обмотка возбуждения – на статоре. Основное отличие заключается ...
0 комментариев