Навигация
Разработка принципиальной схемы электропривода и описание
51926
знаков
3
таблицы
2
изображения
2.3 Разработка принципиальной схемы электропривода и описание
её работы
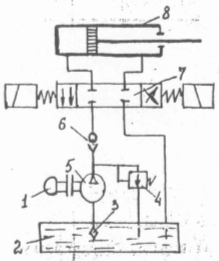
Схема с магнитным контроллером и динамическим торможением, контроллер типа ТСД.
При подъёме груза регулирование скорости электродвигателя производится изменением сопротивления резисторов в цепи обмотки ротора с помощью контакторов ускорения К6 – К9. При спуске груза регулирование производится с помощью тех же резисторов но в режиме динамического торможения. При подъёме и спуске предусматривается автоматический разгон под контролем реле времени (ускорения) КТ2, КТ3 и КТ4. Контроль разгона при подъёме осуществляется реле КТ2 и КТ3, начиная с 3 положения. Реле КТ4 при этом не работает так как в цепь его катушки включены замыкающие контакты К2.
Режим динамического торможения осуществляется на всех положениях спуска, кроме последнего, на котором электродвигатель питается от сети с невыключеными ступенями резисторов роторной цепи. На первом положении спуска все ступени резисторов, кроме невыключаемого, выведены из цепи ротора включенными контакторами ускорения К7, К8, К9.
На положениях спуска 2 и 3 для увеличения скорости в цепь ротора вводятся ступени резисторов (отключаются контакторы К8 и К9 – на втором положении и К7 – на третьем положении). При переходе с третьего на четвёртое положение спуска включается контактор К6 и под контролем реле ускорения КТ2 – КТ4 – контакторы К7 – К9.
Реверс в схеме выполняется контакторами К1 и К2,динамическое торможение – контактором К3, электрически сблокированым с контакторами К1, К2, К5 и механически с К5. Подпитка электродвигателя в режиме динамического торможения при положениях спуска груза осуществляется от сети через контактор К3 (включенного параллельно К5), две фазы электродвигателя, контакт контактора К3 (цепи включения выпрямителя UZ), катушка реле контроля KV1, диод VD12, резистор R1.
В схеме предусмотрено и торможение с помощью механического тормоза с тормозным электромагнитом YB.
Для повышения надёжности в цепи катушки YB предусмотрен двойной разрыв, осуществляемый контактами контактора К4 и реле KV2. На панели управления предусмотрена защита: нулевая (минимального напряжения) – реле KV2, максимального тока – реле KA, конечная – выключатели SQ1 и SQ2, от пробоя вентилей – реле KV3.
2.4 Расчет и выбор отдельных элементов схемы
Включение резисторов в цепи электродвигателей производится с целью регулирования их скорости, а также для ограничения тока и момента при пуске, реверсе и торможении.
Расчёт пусковых сопротивлений для асинхронного двигателя типа
МТН512-8, Рн= 31кВт , Uн = 380В, nн = 715 об/мин,
Ер.н= 304В, Iр.н= 63 А, λ = 3,3
Расчет пусковых сопротивлений производится графическим, аналитическим и графоаналитическим методами расчета.
При условии, если М1 < 0,75Мкр, то механическую характеристику принимают прямолинейной и расчет ведется как для двигателя постоянного тока независимого возбуждения.
Если М1 > Мкр, то характеристики не могут быть приняты прямолинейными и расчет ведется уточненным графоаналитическим методом.
Критический момент двигателя
Мкр = λ∙ Мн (2.62)
Мкр = 3,3∙ 414,4 = 1367,52 Нм (2.62)
Сравниваемый момент М1
М1 = 2∙Мн (2.63)
М1 = 2∙414,4 = 828,8 Нм (2.63)
Проверяем
М1 = 828,8 Нм < Мкр = 1367,52 Нм,
Исходя из неравенства, приведенного выше, принимаем механическую характеристику линейной, и расчет ведем аналитическим методом.
Номинальная скорость вращения рассчитана в пункте 2.1 расчетной части проекта и составила ωн = 74,8 рад/с.
Скорость вращения поля
![]() (2.64)
(2.64)
где f – частота сети, f = 50 Гц;
р – число пар полюсов, р = 3;
![]() (2.64)
(2.64)
Номинальное скольжение
 (2.65)
(2.65)
![]() (2.65)
(2.65)
Задаемся значениями моментов
Мmax(М1) = (1,8÷2,8)∙Мн (2.66)
Мmax(М1) = 2*414,4 = 828,8 Нм (2.66)
Мmin(М2) = (1,1÷1,3)∙Мн (2.67)
Мmin(М2) = 1,2*414,4 = 497,28 Нм (2.67)
Определяем кратность моментов
![]() (2.68)
(2.68)
![]() (2.68)
(2.68)
Определяем сопротивление ступеней
 , (2.69)
, (2.69)
где Е2н – напряжение между кольцами ротора, В
I1 =2∙ Iрн = 2∙63 = 126 А (2.70)
![]() (2.69)
(2.69)
![]() (2.71)
(2.71)
![]() (2.71)
(2.71)
![]() (2.72)
(2.72)
![]() (2.72)
(2.72)
![]() (2.73)
(2.73)
![]() (2.73)
(2.73)
Определяем сопротивление секций
RВШ1 = R1 – R2 , (2.74)
RВШ1 = 15,5 – 9,33 = 6,17 Ом (2.74)
RВШ2 = R2 – R3 , (2.75)
RВШ2 = 9,33 – 5,62 = 3,71Ом (2.75)
RВШ3 = R3 – R2ВТ , (2.76)
RВШ3 = 5,62 – 3,38 = 2,24Ом (2.76)
Производим проверку
RВШ1 + RВШ2 + RВШ3 + R2ВТ = R1 (2.77)
6,17+3,71+2,24+3,38=15,5 Ом (2.77)
Вывод: равенство удовлетворяет условию, следовательно, сопротивления рассчитаны верно.
Похожие работы
... кранов. Электрические схемы бывают принципиальные или элементные, монтажные или маркировочные. Принципиальные схемы отображают взаимодействие элементов электрооборудования, указывают последовательность прохождения тока по силовым цепям и аппаратам управления. Пользоваться принципиальными схемами удобно при ремонте и наладке. Аппаратура в них просто и чётко разбита и отдельные самостоятельные ...
... фрез, дисковых фрез с твердосплавными пластинками по передней грани и плоских строгальных ножей. 2. РАСЧЕТНО-КОНСТРУКТИВНАЯ ЧАСТЬ 2.1 Надежность электроснабжения Электрооборудование, проектируемое в данном курсовом проекте расположено в механическом цехе завода среднего машиностроения. Основным оборудованием данного цеха будут являться все станки, которые относится ко второй категории ...
... износы при перемещении вагонов, исключить возможность саморасцепов и увеличить межремонтные сроки. 4. БЕЗОПАСНОСТЬ И ЭКОЛОГИЧНОСТЬ РЕШЕНИЙ ПРОЕКТА 4.1 Обеспечение безопасности работ на контрольном пункте автосцепки Ремонт пассажирских вагонов производят в вагонном депо, специализирующимся на ремонте цельнометаллических вагонов, в соответствии с руководством и инструкциями по деповскому ...
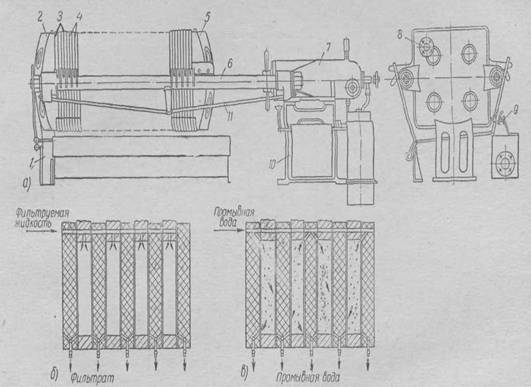
... внизу. Фильтрат из распределительной головки выводится в вакуум-сборники 8. После разгрузки фильтровальная ткань промывается и просушивается [(4) стр. 72 ]. 2. Описание технологической схемы фильтрации Белая фильтрация предназначена для отделения гидратированной двуокиси титана (ГДТ) от гидролизной кислоты и отмывки ГДТ от хромофорных примесей путем фильтрования на листовых вакуум-фильтрах в ...
0 комментариев