Навигация
Проектирование валов электродвигателя
13894
знака
0
таблиц
43
изображения
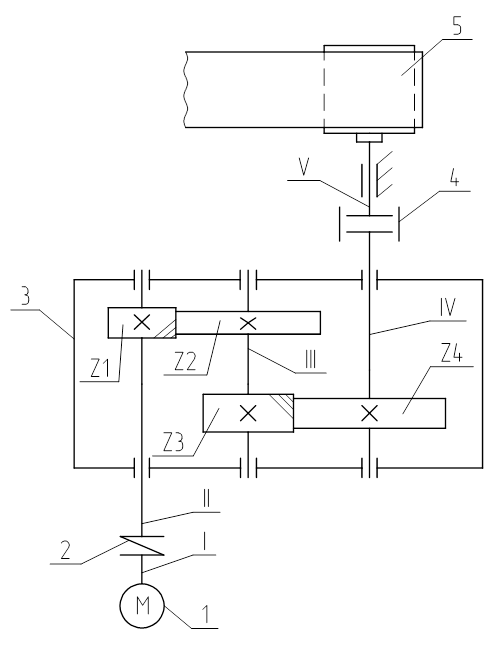
1. Кинематический расчет привода
Выбор электродвигателя.
1.1 Нахождение мощности на выходе.
![]()
1.2 Определение общего КПД привода.
hобщ = hред × h6подш × h2муфты,
где: hред – КПД редуктора;
hподш – КПД подшипников;
hмуфты – КПД муфты.
hмуфты = 0,95; hред = 0,96; hподш = 0,99;
hобщ = 0,96 × 0,996 × 0,952 = 0,816.
1.3 Определение требуемой мощности электродвигателя.
![]()
1.4 Определение частоты вращения вала электродвигателя.
![]()
nвх = nпр × u,
где: u = uбыстр × uтих;
Из таблицы 1.2 [1] выбраны передаточные отношения тихоходной и быстроходной передачи:
uтих = (2,5…5,6); uбыстр =8
nвх = nв × u = 42 × (2,5…5,6) ×8= 840…1882 об/мин.
Исходя из мощности, ориентировочных значений частот вращения, используя табл. 24.9 (уч. П.Ф. Дунаев, О.П. Леликов) выбран тип электродвигателя: АИР 112М4/14321.5 Определение вращающего момента на тихоходном валу
Pm = Pэ.тр× hмуфты× hред = 5,48×0,95×0,96 =5016 кВт
![]()
1.6 Определение действительного фактического передаточного числа.
![]()
Uд = Uред = 34,095
2. Предварительный расчет валов
Крутящий момент в поперечных сечениях валовБыстроходного Tб= 30.19 H×м
Промежуточного Tпр= 212.95 H×м
Тихоходного Tт= 1140.5H×м
Предварительные значения диаметров (мм) различных участков стальных валов редуктора определяют по формулам:
Для быстроходного:
![]()
![]()
![]()
Для промежуточного:
![]()
![]()
![]()
![]()
Для тихоходного:
![]()
![]()
![]()
Выбираем роликовые радиально-упорные однорядные подшипники легкой серии.
Для быстроходного вала: 7205А d=25мм, D=52мм, Tнаиб=16,4мм, r=1,5мм;
Для промежуточного: 7207А d=35мм, D=72мм, Tнаиб =18,5мм, r=2мм;
Для тихоходного: 7213А d=65мм, D=120мм, Tнаиб =25мм, r=2,5мм;
3. Расчет подшипников
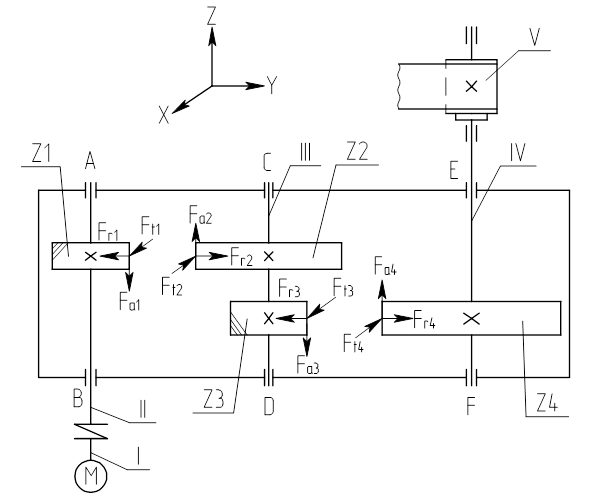
При расчете подшипников силы, действующие в зацеплении, взяты из распечаток, сделанных на ЭВМ по стандартным программам, разработанным на кафедре РК – 3.
3.1 Расчет подшипников на быстроходном валу
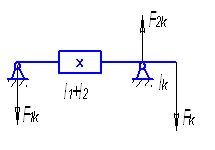
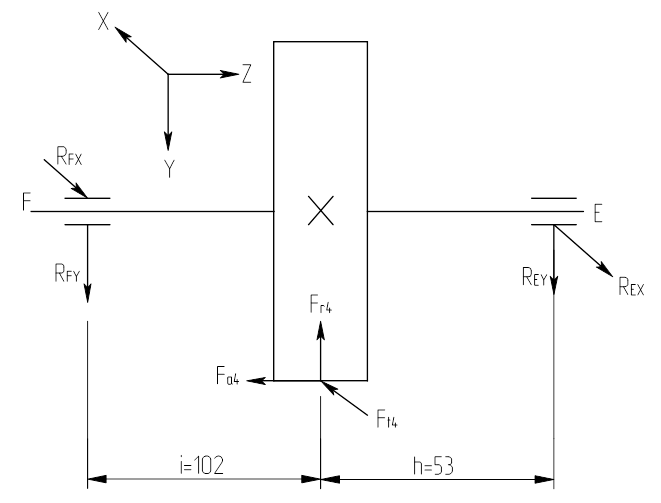
3.1.1 Определение сил, нагружающих подшипники
При проектировании быстроходного вала редуктора применили роликовые радиально-упорные однорядные подшипники по схеме установки в распор.
Диаметр вала под подшипник: dп = 25 мм.
Fr = 717.65 H
![]() = 351.3 H
= 351.3 H
Ft = 1940.2 H
T = 30.2 Н·м
![]()
![]() = 351.3·30.5 ·
= 351.3·30.5 ·![]() = 10.7 Н·м
= 10.7 Н·м
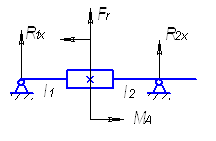
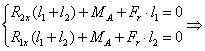
3.1.1.1 Реакции в горизонтальной плоскости
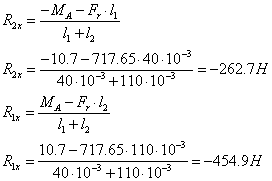
3.1.1.2 Pеакции в вертикальной плоскости
3.1.1.3 Реакции от консольной силы
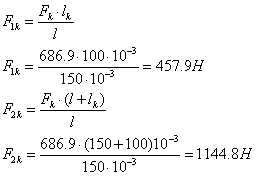
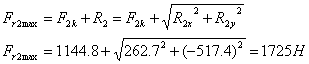
3.1.1.4 Полная реакция в опорах
В расчете принимаем наихудший вариант действия консольной силы

Похожие работы
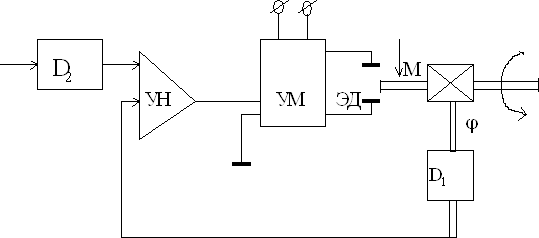
... Национальный Технический Университет Кафедра Технической кибернетики ПОЯСНИТЕЛЬНАЯ ЗАПИСКА к курсовому проекту по курсу «Проектирование систем автоматического управления» «Проектирование системы автоматического регулирования угла поворота вала электродвигателя» Выполнила: ст. гр. А – 61з Брусинов С. Э. Проверил: Дубовик С.А. Оценка ________________ Дата «____» ...
... колеса , (1.12) где y – угол наклона зубьев при прямозубой передаче. Принимаю y = 0о; m – модуль зубчатого зацепления, принимаемый в зависимости от вращающего момента М и конструкции тяговой передачи. , (1.13) По эмпирическим формулам для прямозубых передач (1.14) где К – односторонняя передача. Принимаю К = 1, согласно [1]. Принимаем m = 10. Число зубьев ...
... по программе, устанавливаемой техническими условиями. Заключение По данным задания на курсовой проект спроектирован привод к скребковому конвейеру, представляющий собой электродвигатель, двухступенчатый цилиндрический косозубый редуктор и сварную раму. В процессе проектирования подобран электродвигатель, произведён расчёт редуктора. Расчёт редуктора включает в себя кинематические расчёты ...
... V,м/с Тип 200 315 391,5 45 17 138 1600 163,3 2057 149,7 10,15 прорезиненный ремень 4. Расчёт и конструирование редуктора Тип редуктора - цилиндрический двухступенчатый соосный. Быстроходная (первая) ступень редуктора - цилиндрическая с косозубыми колесами, тихоходная (вторая) - с прямозубыми. 4.1 Материалы зубчатых колес Основным материалом для изготовления зубчатых колес ...
0 комментариев