Навигация
Составление расчетной схемы механической части электропривода
21275
знаков
0
таблиц
14
изображений
1.3 Составление расчетной схемы механической части электропривода
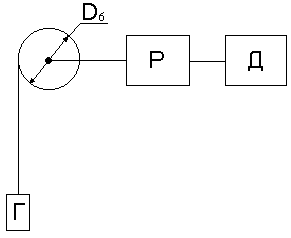
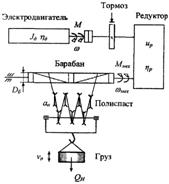
Кинематическая схема представлена на рисунке 3.1.
Jпр i - момент инерции для вращающихся тел;
Jпр j - момент инерции тел, выполняющих поступательное движение;
с i - жесткость;
i - передаточное число.
Выполним приведение параметров схемы к расчетной скорости:
![]() (1.20)
(1.20)
![]() (1.21)
(1.21)
![]() (1.22)
(1.22)
Момент инерции барабана рассчитывается по формуле:

![]() ,(1.23)
,(1.23)
гдеGб – вес барабана;
D - диаметр барабана;
iред – передаточное отношение редуктора
Момент инерции груза определяем по формуле:
 ,
,![]() (1.24)
(1.24)
гдеG – вес груза;
D - диаметр барабана;
Iпол – передаточное отношение полиспаста;
Момент инерции грузозахватывающего устройства определяем по формуле:
 (1.25)
(1.25)
гдеG0 – вес грузозахватывающего устройства;
Момент инерции двигателя JДВ=1.15 ![]() . Приведенный момент инерции редуктора по условию равен 35% от момента инерции двигателя:
. Приведенный момент инерции редуктора по условию равен 35% от момента инерции двигателя:
![]()
![]() (1.26)
(1.26)
Момент инерции муфты:
![]()
![]() (1.27)
(1.27)
Приведенная жесткость муфты:
![]() (1.28)
(1.28)
Приведенная жесткость каната:
 (1.29)
(1.29)
гдеN – число несущих канатов;
H – максимальная высота подъема.
Имеем четырехмассовую расчетную схему.
![]() ,
,![]() (1.30)
(1.30)
![]() (1.31)
(1.31)
![]() (1.32)
(1.32)
![]()
![]() (1.33)
(1.33)
Перейдем к эквивалентной трехмассовой расчетной схеме, используя метод последовательных упрощений.
Расчет параметров эквивалентной схемы производится по следующим формулам:
![]() ,
,![]() (1.34)
(1.34)
![]() Н*м.(1.35)
Н*м.(1.35)
Эквивалентная жёсткость рассчитывается следующим образом:
 Н*м(1.36)
Н*м(1.36)
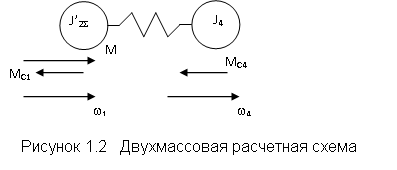
Перейдем к двухмассовой расчетной схеме, изображенной на рисунке 1.2.:
![]()
![]() (1.37)
(1.37)
![]() Н*м.(1.38)
Н*м.(1.38)
![]() Н*м.(1.39)
Н*м.(1.39)
1.4 Построение нагрузочной диаграммы и механической характеристики рабочей машины
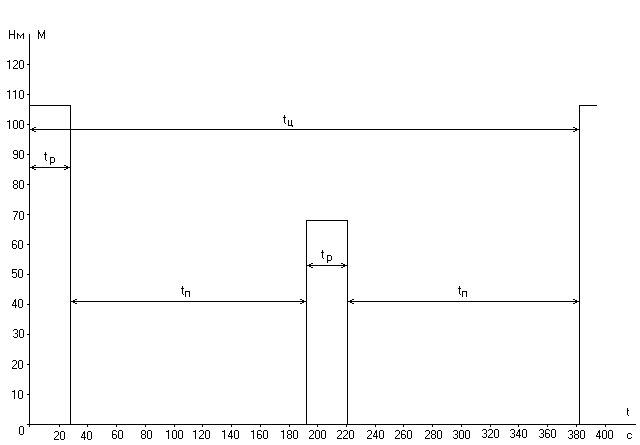
Все параметры, требуемые для построения нагрузочной диаграммы, рассчитаны выше.
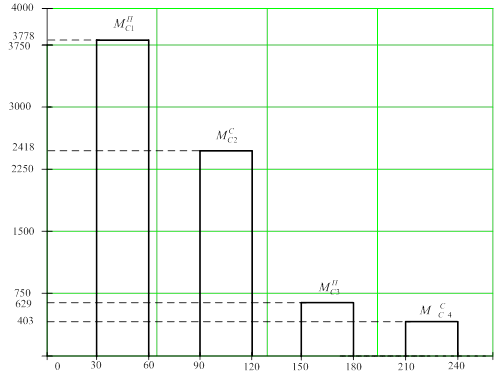
Нагрузочная диаграмма представлена на рис. 1.2.
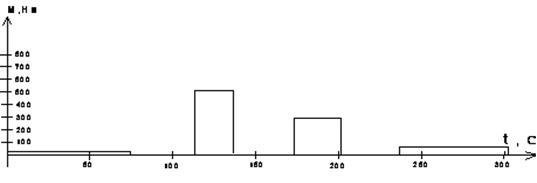
Рисунок 1.3 – Нагрузочная диаграмма
Время переходного процесса меньше, чем 10 % от времени установившегося движения. Поэтому при составлении нагрузочной диаграммы не надо дополнительно учитывать динамический момент.
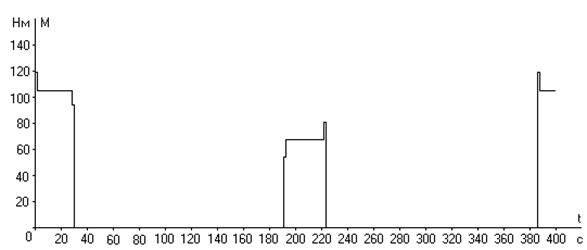
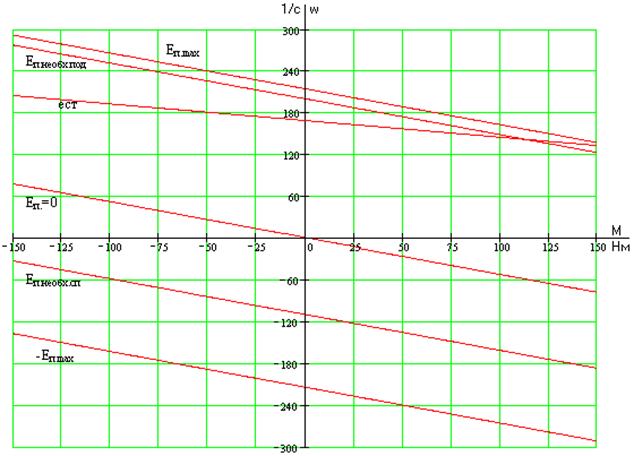
Зная моменты нагрузки, можно построить механические характеристики рабочей машины. Характеристики представлены на рисунке 1.4.
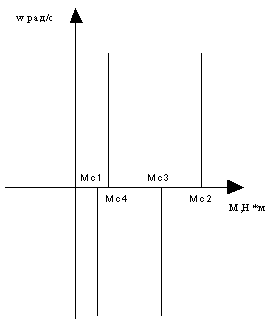 |
Рисунок 1.4 – Механические характеристики рабочей машины
2. Анализ и описание системы “Электропривод - сеть” и “Электропривод - оператор”
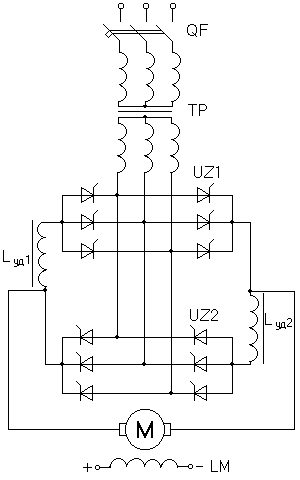
Электропривод механизма подъема мостового крана питается стандартным трехфазным напряжением 380 В частотой 50 Гц. В промышленной сети возможны значительные броски напряжения, а также могут возникать аварийные ситуации, поэтому необходимо обеспечить работоспособность установки при возможных колебаниях напряжения в сети и обеспечить защиту от токов короткого замыкания. Для этого привод подключаем к сети через автоматический выключатель, который также обеспечивает защиту двигателя от возможного короткого замыкания, как со стороны питающей сети, так и со стороны нагрузки.
Управление краном осуществляется непосредственно оператором-крановщиком, поэтому управление должно быть относительно простым, позволяющим легко управлять разгоном и торможением крана, а так же осуществлять фиксированный режим работы на номинальных скоростях перемещения.
3. Выбор принципиальных решений
3.1 Построение механической части привода
Кинематическая схема электропривода механизма подъема изображена на рис. 3.1.
Вал двигателя через муфту соединен с входным валом редуктора. Редуктор понижает скорость вращения и одновременно увеличивает момент. Выходной вал редуктора соединен через муфту с канатным барабаном. Полиспаст крепится на двух канатах. К полиспасту крепится грейфер. Полиспаст предназначен для уменьшения линейной скорости грейфера. Канатный барабан посредством ременной передачи соединен с кабельным барабаном, предназначенным для подачи питающего кабеля.
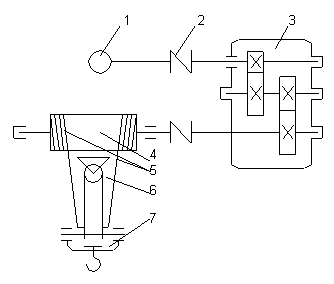
Рисунок 3.1 - Кинематическая схема электропривода механизма подъема.
Составление расчетной схемы механической части электропривода приведено в пункте 4.2
На рис. 3.1 введены следующие обозначения:
1 - двигатель;
2 - соединительная муфта;
3 - редуктор;
4 –барабан;
5 – канат;
6 – полиспаст;
7 – грузозахватывающего устройства;
3.2 Выбор типа привода и способа регулирования координат
Для приведения в движение механизма крана можно использовать несколько вариантов двигателей. Это может быть двигатель постоянного тока независимого или последовательного возбуждения, может быть асинхронный двигатель. Можно применять двигатели общепромышленного исполнения. Также промышленностью выпускаются специальные крановые серии двигателей постоянного и переменного тока. Каждый из этих двигателей имеет свои достоинства и недостатки. Так, например, двигатели постоянного тока позволяют легко и хорошо регулировать скорость вращения, но по габаритам они намного превосходят двигатели переменного тока. Асинхронные двигатели по габаритам меньше, но система регулирования двигателей переменного тока сложнее.
Возможными способами регулирования скорости вращения двигателей постоянного тока являются регулирование напряжения питания с помощью управляемых выпрямителей для двигателей с независимым возбуждением и шунтированием якоря для двигателей с независимым и последовательным возбуждением.
Для управления асинхронным двигателем с короткозамкнутым ротором можно использовать преобразователь частоты.
Все эти способы так же отличаются друг от друга сложностью, потерями, стоимостью и требуют выбора оптимального способа регулирования для каждого конкретного случая.
Ниже приведены возможные решения с учетом предъявляемых к приводу требований.
двигатель постоянного тока с независимым возбуждением, регулирование напряжения с помощью управляемого выпрямителя;
двигатель постоянного тока с последовательным возбуждением, шунтирование якоря;
двигатели общепромышленного исполнения с короткозамкнутым ротором, частотное управление;
двигатели общепромышленного исполнения с фазным ротором, сопротивления в цепь ротора;
Похожие работы

... (разгон, замедление) и период движения с установившейся скоростью. Мостовой кран установлен в литейном цеху металлургического производства, где наблюдается выделение пыли, поэтому электродвигатель и все электрооборудование мостового крана требует защиты общепромышленного исполнения не ниже IP 53 - защита электрооборудования от попадания пыли, а также полная защита обслуживающего персонала от ...
... обмоток трансформатора: Ом Rуд – активное сопротивление уравнительных дросселей: Ом. Итак, Ом Ом. Выводы по главе 1. В главе 1 на основе технических данных и требований электропривода подъемного механизма крана был произведен выбор схемы ЭП. В результате анализа и обзора применяемых систем регулирования показана целесообразность применения системы тиристорный преобразователь – ...
... , замедление) и период движения с установившейся скоростью. Мостовой кран установлен в кузнечнопрессовом цеху машиностроительного производства, где наблюдается выделение пыли, поэтому электродвигатель и все электрооборудование мостового крана требует защиты общепромышленного исполнения не ниже IP 53 - защита электрооборудования от попадания пыли, а также полная защита обслуживающего персонала от ...
... , которая бы обеспечила заданные режимы его работы. 1. Выбор основных элементов электрооборудования механизма подъема мостового крана по исходным данным. 1.1 Исходные данные для выбора электропривода механизма подъема мостового крана Вариант 22 Грузоподъемность крана , т 140 Номинальная скорость подъема (спуска) , м/с 0,1 Допустимое ускорение , м/с2 0,1 Рабочий путь ...
0 комментариев