Навигация
Расчет статических механических характеристик привода
21275
знаков
0
таблиц
14
изображений
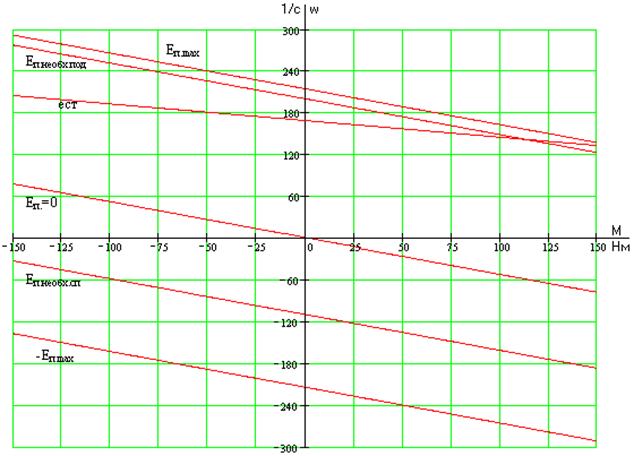
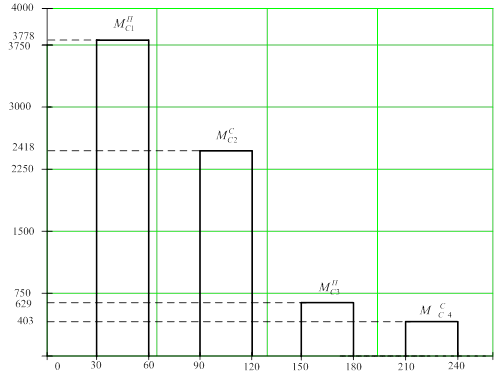
5.2 Расчет статических механических характеристик привода
Так как для регулирования скорости применяется ПИ – регулятор (будет показано ниже), который дает нулевую статическую ошибку, поэтому механическая характеристика привода будет абсолютно жесткой.
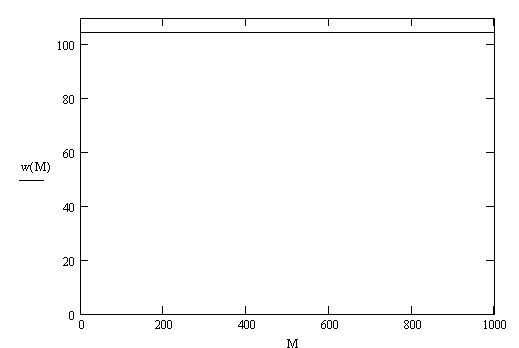
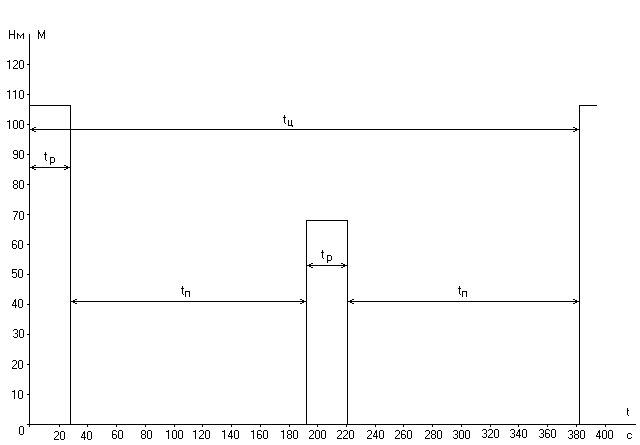
Рисунок 5.3. – Механические характеристики привода.
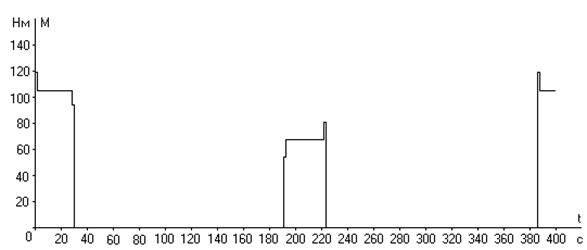
6 Расчет переходных процессов в электроприводе за цикл работы
Моделирование работы электропривода будем проводить в среде Mathlab 6.5.
Так как частота коммутации вентелей в преобразователе частоты очень велика (порядка 15000 гц), то его постоянная времени очень мала и можно ей пренебречь. Преобразователь частоты при моделировании представим линейным звеном с коэффициентом передачи КПЧ.
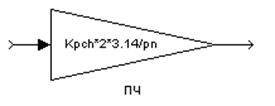
Рисунок 6.1 – Структурная схема преобразователя частоты.
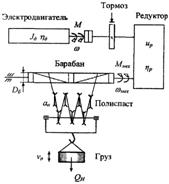
Мы имеем двухмассовую расчетную схему механической части. Выражения для двухмассовой расчетной схемы:
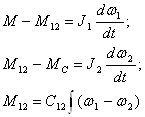 (6.1)
(6.1)
Значение МС зависит от вида нагрузки. Так как нагрузка активная(потенциальная), то МС=Const.
Структурная схема двухмассовой расчетной схемы механической части представлена на рисунке 6.2:
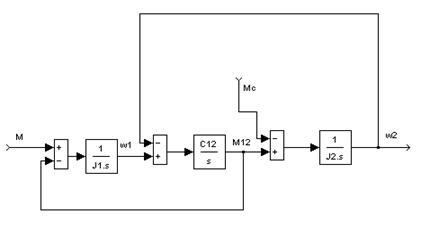
Рисунок 6.2 – Структурная схема механической части.
Для моделирования асинхронного двигателя используем линеаризованную модель:
![]() (6.2)
(6.2)
или в операторной форме:
![]() (6.3)
(6.3)
где ![]() - жесткость характеристики, определяется по формуле:
- жесткость характеристики, определяется по формуле:
 ;(6.4)
;(6.4)
![]() - электромагнитная постоянная времени двигателя, определяется по формуле:
- электромагнитная постоянная времени двигателя, определяется по формуле:
 (6.5)
(6.5)
Схема линеаризованной модели асинхронного двигателя представлена на рисунке 6.3.
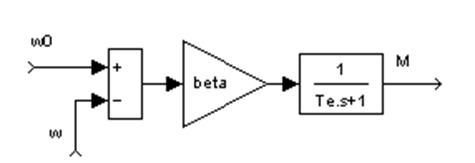
Рисунок 6.3 – Линеаризованная модель асинхронного двигателя.
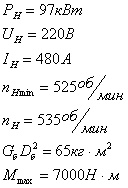
Максимальное значение момента двигателя:
![]() (6.6)
(6.6)
Коэффициент передачи преобразователя по частоте определяется отношением максимального сигнала на выходе преобразователя к максимальному сигналу на выходе регулятора момента:
![]() (6.7)
(6.7)
![]()
Максимальное значение момента ограничения равно критическому моменту естественной характеристики двигателя:
![]() (6.8)
(6.8)
![]()
Из уравнения (6.3) находим Крм:
![]() (6.9)
(6.9)
![]()
Регулятор момента представляется в виде П–регулятора.
Предельное значение коэффициента усиления обратной связи, обеспечивающее регулирования момента с нулевой ошибкой:
![]() (6.10)
(6.10)
![]()
Для расчета контура скорости представим контур момента в виде звена:
![]()
![]() (6.11)
(6.11)
Обозначив
![]() ,
,
получим передаточную функцию оптимизированного контура регулирования момента:
![]() (6.12)
(6.12)
где ![]()
Коэффициент передачи датчика отрицательной обратной связи по скорости рассчитывается как отношение напряжение задания на соответствующее значение максимальной скорости:
![]() (6.13)
(6.13)
![]()
Малой некомпенсируемой постоянной времени контура регулирования скорости является электромагнитная постоянная двигателя, т.е. принимаем ![]() .
.
Большой компенсируемой постоянной времени контура регулирования скорости является механическая постоянная двигателя.
Для получения нулевой ошибки в статике и форсировки переходных процессов в динамике регулятор скорости должен быть представлен в виде ПИ – регулятора.
Настроим регулятор скорости на симметричный оптимум.
Желаемая передаточная функция контура скорости настроенного на симметричный оптимум:
![]() (6.14)
(6.14)
Передаточная функция объекта регулирования:
![]() (6.15)
(6.15)
Разделив желаемую передаточную функцию контура скорости, на передаточную функцию объекта регулирования, получим передаточную функцию регулятора скорости:
![]() (6.16)
(6.16)
где
![]() ,
,
![]() (6.17)
(6.17)
Где ![]() - суммарный момент инерции привода
- суммарный момент инерции привода
![]()
![]() (6.18)
(6.18)
![]()
![]() (6.19)
(6.19)
![]()
Расчет переходных процессов производятся в пакете Matlab 6.5.
Модель для исследования работы привода мостового крана приведена на рисунке 6.5:
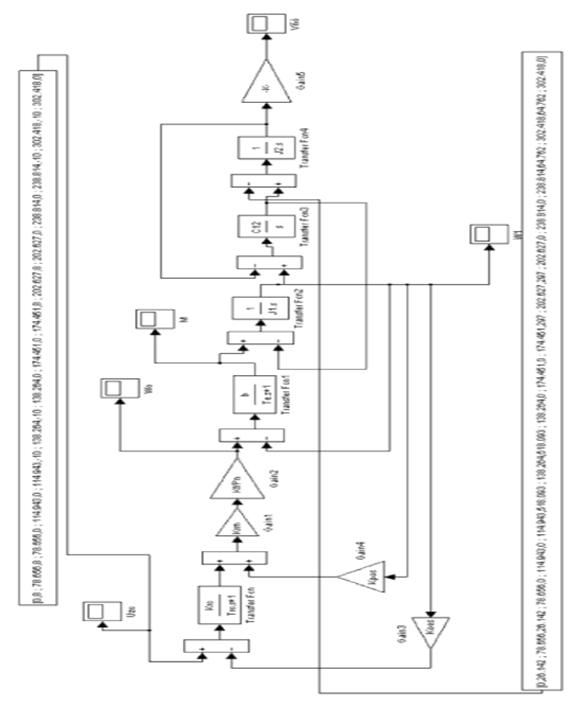
Рисунок 6.5 – Модель для исследования работы привода мостового крана.
Похожие работы

... (разгон, замедление) и период движения с установившейся скоростью. Мостовой кран установлен в литейном цеху металлургического производства, где наблюдается выделение пыли, поэтому электродвигатель и все электрооборудование мостового крана требует защиты общепромышленного исполнения не ниже IP 53 - защита электрооборудования от попадания пыли, а также полная защита обслуживающего персонала от ...
... обмоток трансформатора: Ом Rуд – активное сопротивление уравнительных дросселей: Ом. Итак, Ом Ом. Выводы по главе 1. В главе 1 на основе технических данных и требований электропривода подъемного механизма крана был произведен выбор схемы ЭП. В результате анализа и обзора применяемых систем регулирования показана целесообразность применения системы тиристорный преобразователь – ...
... , замедление) и период движения с установившейся скоростью. Мостовой кран установлен в кузнечнопрессовом цеху машиностроительного производства, где наблюдается выделение пыли, поэтому электродвигатель и все электрооборудование мостового крана требует защиты общепромышленного исполнения не ниже IP 53 - защита электрооборудования от попадания пыли, а также полная защита обслуживающего персонала от ...
... , которая бы обеспечила заданные режимы его работы. 1. Выбор основных элементов электрооборудования механизма подъема мостового крана по исходным данным. 1.1 Исходные данные для выбора электропривода механизма подъема мостового крана Вариант 22 Грузоподъемность крана , т 140 Номинальная скорость подъема (спуска) , м/с 0,1 Допустимое ускорение , м/с2 0,1 Рабочий путь ...
0 комментариев