Метод сечений для определения внутренних усилий
Эпюры внутренних усилий при растяжении-сжатии и кручении
Понятие о напряжениях и деформациях
Свойства тензора напряжений. Главные напряжения
Упругость и пластичность. Закон Гука
Механические характеристики конструкционных материалов
Растяжение (сжатие) призматических стержней
Составные балки и перемещения при изгибе
Напряжения и деформации при кручении призматических стержней кругового поперечного сечения
Навигация
Понятие о напряжениях и деформациях
Сопротивление материалов
85824
знака
1
таблица
44
изображения
5. Понятие о напряжениях и деформациях
Ключевые слова: нормальное и касательное напряжения, линейная и угловая деформации, тензор напряжений.
Как отмечалось выше, внутренние силы, действующие в некотором сечении со стороны отброшенной части тела, можно привести к главному вектору и главному моменту. Зафиксируем точку М в рассматриваемом сечении с единичным вектором нормали n. В окрестности этой точки выделим малую площадку F. Главный вектор внутренних сил, действующих на этой площадке, обозначим через P (рис. 1, а). При уменьшении размеров площадки соответственно уменьшаются главный вектор и главный момент внутренних сил, причем главный момент уменьшается в большей степени. В пределе при F0 получим
![]()
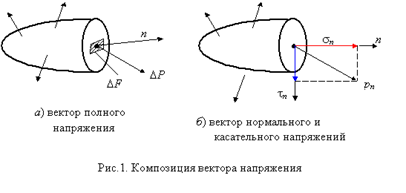
Аналогичный предел для главного момента равен нулю. Введенный таким образом вектор рn называется вектором напряжений в точке. Этот вектор зависит не только от действующих на тело внешних сил и координат рассматриваемой точки, но и от ориентации в пространстве площадки F, характеризуемой вектором n. Совокупность всех векторов напряжений в точке М для всевозможных направлений вектора n определяет напряженное состояние в этой точке.
В общем случае направление вектора напряжений рn не совпадает с направлением вектора нормали n. Проекция вектора рn на направление вектора n называется нормальным напряжением sn, а проекция на плоскость, проходящую через точку М и ортогональную вектору n, - касательным напряжением n (рис. 1 б).
Размерность напряжений равна отношению размерности силы к размерности площади. В международной системе единиц СИ напряжения измеряются в паскалях: 1 Па=1 Н/м2.
При действии внешних сил наряду с возникновением напряжений происходит изменение объема тела и его формы, т. е. тело деформируется. При этом различают начальное (недеформированное) и конечное (деформированное) состояния тела.
Отнесем недеформированное тело к декартовой системе координат Oxyz (рис. 2). Положение некоторой точки М в этой системе координат определяется радиус-вектором r(х, у, z). В деформированном состоянии точка М займет новое положение М', характеризуемое радиус-вектором r' (х, у, z). Вектор u=r'-r называется вектором перемещений точки М. Проекции вектора u на координатные оси определяют компоненты вектора перемещений u(х, у, z), v(х, у, z), w(х, у, z), равные разности декартовых координат точки тела после и до деформации.
Перемещение, при котором взаимное расположение точек тела не меняется, не сопровождается деформациями. В этом случае говорят, что тело перемещается как жесткое целое (линейное перемещение в пространстве или поворот относительно некоторой точки). С другой стороны, деформация, связанная с изменением формы тела и его объема, невозможна без перемещения его точек.
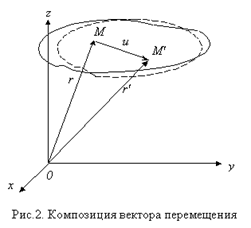
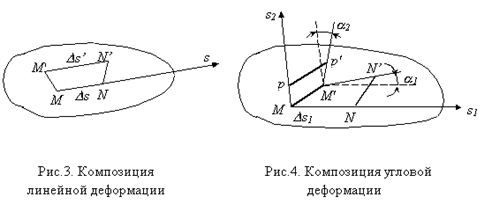
Деформации тела характеризуются изменением взаимного расположения точек тела до и после деформации. Рассмотрим, например, точку М и близкую к ней точку N, расстояние между которыми в недеформированном состоянии вдоль направления вектора s обозначим через s (рис. 2). В деформированном состоянии точки М и N переместятся в новое положение (точки М' и N'), расстояние между которыми обозначим через s'. Предел отношения
![]()
называется относительной линейной деформацией в точке М в направлении вектора s. Рассматривая три взаимно перпендикулярных направления, например, вдоль координатных осей Ох, Оу и Oz, получим три компоненты относительных линейных деформаций ex, ey, ez, характеризующих изменение объема тела в процессе деформации.
Для описания деформаций, связанных с изменением формы тела, рассмотрим точку М и две близкие к ней точки N и Р, расположенные в недеформированном состоянии в направлении двух взаимно ортогональных векторов s1 и s2. Расстояния между точками обозначим через s1 и s2 (рис. 4). В деформированном состоянии положение точек обозначим через М', N' и Р'. Угол между отрезками M'N' и М'Р' в общем случае будет отличным от прямого. При s10, s20 изменение угла 12 между двумя ортогональными до деформации направлениями называется угловой деформацией. Как видно из рис. 4, угловая деформация складывается из двух углов 1 и 2, связанных с поворотами отрезков M'N' и М'Р' в плоскости, образованной векторами s1 и s2, относительно этих векторов. Если заданы три взаимно ортогональных вектора, направленных вдоль координатных осей, то имеются три угловые деформации xy, xz и yz, которые вместе с тремя линейными деформациями ex, ey и ez полностью определяют деформированное состояние в точке.
Напряженное состояние в точке. Тензор напряжений
Вектор напряжений pn является физическим объектом, имеющим длину, направление и точку приложения. В этом смысле он обладает векторными свойствами. Однако этому объекту присущи некоторые свойства, не характерные для векторов. В частности, величина и направление вектора напряжений зависят от ориентации вектора n нормали бесконечно малого элемента поверхности dF. Совокупность всех возможных пар векторов n, рn в точке определяет напряженное состояние в данной точке. Однако для полного описания напряженного состояния в точке нет необходимости задавать бесконечное множество направлений вектора n, достаточно определить векторы напряжений на трех взаимно перпендикулярных элементарных площадках. Напряжения на произвольно ориентированных площадках могут быть выражены через эти три вектора напряжений. В дальнейшем лектор умышленно меняет ориентацию координат. Так, что ось Z - продольная ось бруса, а X и Y - координаты любой точки его поперечного сечения. Проведем через точку М три взаимно перпендикулярных плоскости с векторами нормалей, направления которых совпадают с направлениями координатных осей. Элементарные площадки образуем дополнительными сечениями, параллельными исходным плоскостям и отстоящими от них на бесконечно малые расстояния dx, dy, dz. В результате в окрестности точки М получим бесконечно малый параллелепипед, поверхность которого образована элементарными площадками dFх=dydz, dFн=dxdz, dFя=dxdy. Векторы напряжений px, py, pz, действующие на элементарных площадках, показаны на рис. 5.
Разложим каждый вектор напряжений на составляющие вдоль координатных осей (рис. 6). На каждой площадке действует одно нормальное напряжение x, y, z, где индекс обозначает направление вектора нормали к площадке и два касательных напряжения с двумя индексами, из которых первый указывает направление действия компоненты напряжения, второй-направление вектора нормали к площадке.
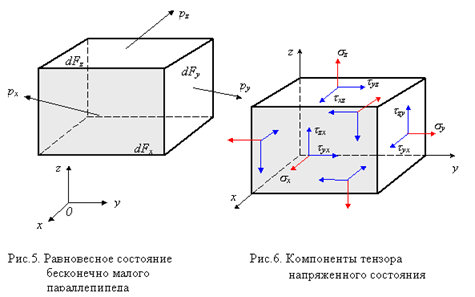
Совокупность девяти компонент напряжений (по три на каждой из трех взаимно перпендикулярных площадок) представляет собой некоторый физический объект, называемый тензором напряжений в точке. Тензор можно представить в виде матрицы, соответствующим образом упорядочив девять компонент:
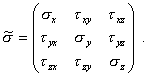
Для компонент тензора напряжений общепринятым является следующее правило знаков: компонента считается положительной, если на площадке с положительной внешней нормалью (т. е. направленной вдоль одной из координатных осей) эта компонента направлена в сторону положительного направления соответствующей оси. На рис. 6 все компоненты тензора напряжений изображены положительными. На площадках с отрицательной внешней нормалью (грани параллелепипеда, не видимые на рис. 5 и 6) положительная компонента направлена в противоположном направлении. Напряжения на трех взаимно ортогональных площадках с отрицательными направлениями нормалей также характеризуют напряженное состояние в точке. Эти напряжения, являющиеся компонентами тензора напряжений , определяются аналогично напряжениям на площадках с положительной нормалью. Они обозначаются теми же символами и имеют положительное направление, обратное изображенному на рис. 6.
Похожие работы
... мощности · Ваттметр · Варметр · Фазометр 2. Основные понятия: сопротивление материалов Сопротивление материалов, наука о прочности и деформируемости элементов (деталей) сооружений и машин. Основные объекты изучения Сопротивление материалов – стержни и пластины, для которых устанавливаются соответствующие методы расчёта на прочность, жёсткость и устойчивость при действии статических и ...
... шрифт Times 16пт; «Курский государственный технический университет» - шрифт №5; в компьютерном варианте шрифт Times 14пт; «Кафедра сопротивления материалов и строительной механики» - шрифт №5; в компьютерном варианте шрифт Times 14пт; названию расчетно-графической работы – шрифт №10; в компьютерном варианте Times 18пт; «расчетно-графическая работа №…» - шрифт №7; в компьютерном варианте Times ...
... сечение 1 мм2 Сопротивление проводника зависит не только от материала, из которого он изготовлен, оно зависит и от его размеров длины и поперечного сечения. где - удельное сопротивление l - длина S – площадь поперечного сечения Схема: Оборудование: приборный щит № 1 амперметр 0 – 1А Вольтметр 0 – 150 В Медный провод Æ ...
... . Электропроводность диэлектриков очень мала, так как переход заметного числа электронов в зону проводимости - случайное явление, обусловленное, например, дефектами структуры. Электрическое сопротивление - свойство материалов как проводников противодействовать электрическому току. Вес вещества, помещенные во внешнее магнитное поле, намагничиваются. Намагничивание связано с наличием магнитных ...
0 комментариев