Навигация
Определение динамических параметров для электродвигателя
15868
знаков
5
таблиц
7
изображений
5. Определение динамических параметров для электродвигателя
Динамическими называются параметры, определяющие характер протекания переходных процессов.
При расчете пренебрегают электромагнитной инерционностью якорной цепи, реакцией якорей генератора и двигателя, влиянием вихревых токов с учетом этих допущений к динамическим параметрам системы генератор-двигатель относятся:
1 Электромагнитная постоянная времени обмотки возбуждения генератора
![]() (5.1)
(5.1)
2 Электромеханическая постоянная времени электропривода - ТМ
 , (5.2)
, (5.2)
где JД – приведенный к валу двигателя эквивалентный момент инерции всей системы ЭП, кг×м2
JД=KJ·JД.=2·10,25=20,5, (5.3)
где KJ – коэффициент инерции привода;
JД – момент инерции якоря привода, кг·м2.
![]() ,
,
где LВСР – индуктивность обмотки возбуждения, Гн;
RВГ - активное сопротивление обмотки возбуждения, Оm.
Индуктивность обмотки возбуждения является переменной величиной и зависит от тока возбуждения. Пользуясь кривой намагничивания ФГ=f(F), найдем зависимость LB=f(IВ.Г.) по формуле:
 , (5.4)
, (5.4)
где ФН.Г,IВГ.Н – номинальное значение потока и тока возбуждения генератора;
н – коэффициент рассеивания магнитного потока при номиналом режиме. н = 1,1.
Расчеты по формуле (5.4) удобно свести в таблицу 5.1
Таблица 5.1- Расчет индуктивности обмотки возбуждения
| ΔIВГ | ΔФН.Г | ΔФН.Г/ΔIВГ |
| (3)+(4) | (5)×2рWов.г. | IВСРj |
| 1,052 | 0,0031 | 0,00208 | 0,00027 | 0,0023 | 12,22 | 0,526 |
| 1,053 | 0,0022 | 0,00149 | 0,0017 | 8,74 | 1,57 | |
| 1,052 | 0,00157 | 0,00168 | 0,00195 | 6,46 | 2,631 | |
| 1,053 | 0,00123 | 0,000647 | 0,00091 | 7,41 | 3,68 | |
| 1,053 | 0,0007 | 0,000855 | 0,0011 | 3,45 | 4,73 | |
| 1,052 | 0,0009 | 0,000427 | 0,00069 | 4,18 | 5,78 | |
| 2,106 | 0,0009 | 0,000213 | 0,0004 | 2,62 | 7,36 | |
| 4,21 | 0,0009 | 0,00294 | 0,0032 | 1,52 | 10,52 |
По данным таблицы 5.1 строим зависимость ![]() .
.
 (5.5)
(5.5)
Рисунок 5.1-Расчет LВ.СР.
LВСР= 7,9 Гн,
![]() .
.
Похожие работы
... В результате получаем, что максимальную взвешенную сумму имеет следующий привод: преобразователь частоты – асинхронный двигатель. Следовательно, данный привод и подлежит дальнейшему расчету. 4. Расчет силового электропривода 4.1 Расчет параметров и выбор двигателя Расчетный режим работы двигателя – длительный с переменной нагрузкой, так как в процессе работы двигателя паузы отсутствуют ...
... при механических, климатических и специальных воздействиях окружающей среды; - специальные требования по защите информации. Построение «автоматизированной системы информационной поддержки наладочных работ электропривода» Дано: 1 Объект информатизации 2 Ограничения 3 Критерий 4 База данных 5 Классификатор характеристик 6 Пакет программ ...
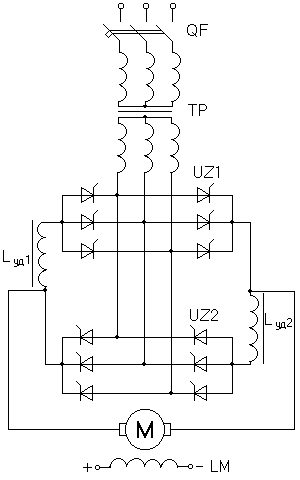
... обмоток трансформатора: Ом Rуд – активное сопротивление уравнительных дросселей: Ом. Итак, Ом Ом. Выводы по главе 1. В главе 1 на основе технических данных и требований электропривода подъемного механизма крана был произведен выбор схемы ЭП. В результате анализа и обзора применяемых систем регулирования показана целесообразность применения системы тиристорный преобразователь – ...
... ток двигателя. (4.3) = 251,43 А В соответствии с пунктом 2.2 методразработки по [4], стр. 14, выбираем преобразователь типа КТЭУ 320/230 (комплектный тиристорный электропривод универсальный). Его данные: Id = 320 А, Ud = 230 В, = 2,25 (значение перегрузочной способности взято из [2], стр. 5, табл. 1). Нужно произвести проверку правильности ...
0 комментариев