Построение нагрузочной диаграммы и механической характеристики рабочей машины
Расчет силового электропривода
Расчет параметров и выбор силового преобразователя
Расчет статических механических и электромеханических характеристик двигателя и привода
Расчет переходных процессов в электроприводе за цикл работы
Навигация
Расчет силового электропривода
Расчет силового электропривода
31450
знаков
1
таблица
16
изображений
Содержание
1. Анализ и описание системы «электропривод – рабочая машина»
1.1 Количественная оценка вектора состояния или тахограммы требуемого процесса движения
1.2 Количественная оценка моментов и сил сопротивления
1.3 Составление расчетной схемы механической части электропривода
1.4 Построение нагрузочной диаграммы и механической характеристики рабочей машины
2. Анализ и описание системы «электропривод - сеть» и «электропривод — оператор»3.Выбор принципиальных решений
3.1 Построение механической части электропривода
3.2 Выбор типа привода (двигателя)
3.3 Выбор способа регулирования координат
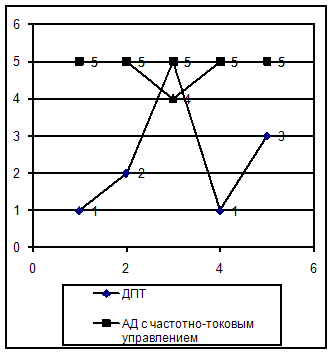
3.4 Оценка и сравнение выбранных вариантов
4. Расчет силового электропривода
4.1 Расчет параметров и выбор двигателя
4.2 Расчет параметров и выбор силового преобразователя
5. Расчет статических механических и электромеханических характеристик двигателя и привода
6. Расчет переходных процессов в электроприводе за цикл работы
7. Проверка правильности расчета мощности и окончательный выбор двигателя
1. Анализ и описание системы «электропривод – рабочая машина»
1.1 Количественная оценка вектора состояния или тахограммы требуемого процесса движения
Скорость электропривода во время правки и на холостом ходу, которая выбирается из диапазона скоростей от 1,45 м/с до 2,4 м/с.
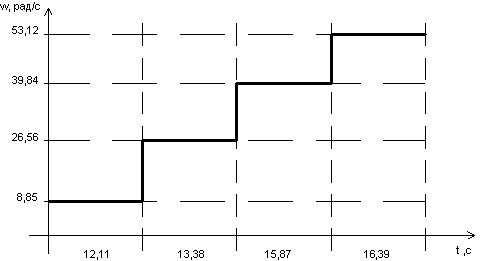
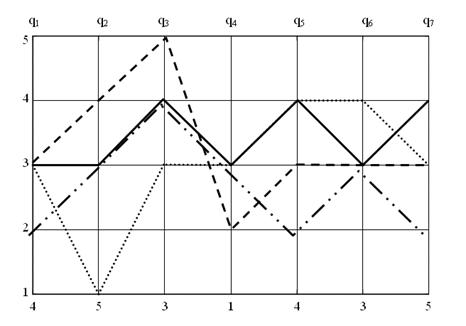
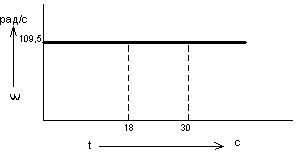
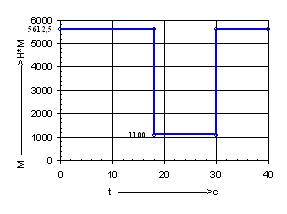
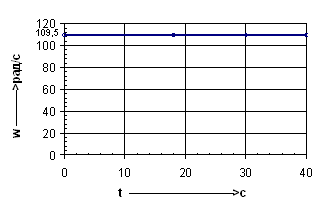
По описанию технологического процесса [ 1] , можно построить тахограмму требуемого процесса движения. По требованию процесса цикл работы происходит при постоянной скорости. Пуск и переход на другую скорость не входит в цикл работы. Тахограмма показана на рисунке 1 .
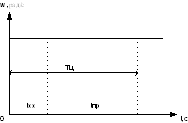
Рисунок 1- Тахограмма рабочего процесса
Определим значение минимальной угловой скорости двигателя исходя из тахограммы и условий задания:
![]() (1)
(1)
где i - передаточное число редуктора;
v1 - минимальная скорость передвижения листа;
R - радиус рабочих и опорных роликов.
Максимальная угловая скорость двигателя:
![]() (2)
(2)
где v2 - максимальная скорость передвижения листа.
Рассмотрим два случая:
1)прогонка максимальной длины листа с минимальной скоростью;
2) прогонка минимальной длины листа с максимальной скоростью.
Первый случай.
Время прокатки:
![]() (3)
(3)
где Lmax - максимальная длина листа.
По условию задания ПВ механизма - 75%. Определим время цикла:
![]() (4)
(4)
Время холостого хода:
![]() (5)
(5)
Второй случай.
![]()
![]() (6)
(6)
![]()
Будем выбирать двигатель с расчётным режимом S1 т.к. за время цикла работы привода отсутствуют паузы.
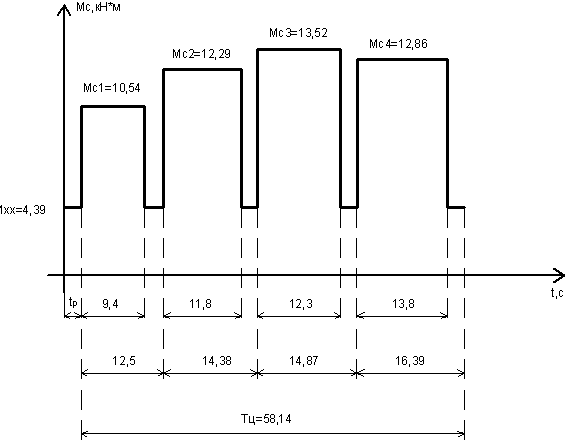
1.2 Количественная оценка моментов и сил сопротивления
Зная общий суммарный момент при максимальной нагрузке, отнесенный к рабочим валкам, можно определить статический момент, приведенный к валу:
![]() (7)
(7)
где ![]() - КПД механизма (считается неизменным).
- КПД механизма (считается неизменным).
Момент холостого хода, приведенный к валу двигателя, задан и равен:
![]()
Момент на валу двигателя во время правки определяется по формуле:
![]() (8)
(8)
1.3 Составление расчетной схемы механической части электропривода
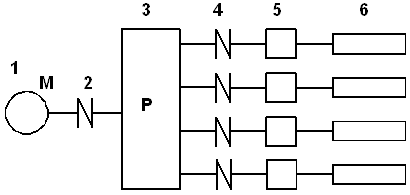
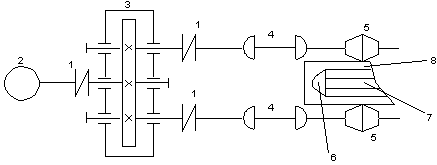
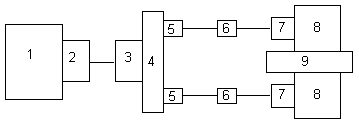
Для теоретического исследования реальную механическую часть электропривода (рисунок 2) заменяем динамически эквивалентной приведенной расчётной схемой, состоящей из сосредоточенных инерционных элементов, соединённых между собой упругими связями, и обладающей таким же энергетическим запасом, как и реальная исходная система привода. Параметрами эквивалентной приведенной расчётной схемы являются суммарные приведенные моменты инерции масс, образованные приведенными массами, связи между которыми приняты жёсткими, и эквивалентные приведенные жёсткости упругих механических связей.
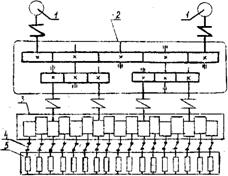
Рисунок 2 - Кинематическая схема механизма
Электропривод состоит из следующих кинематических элементов:
1 - электродвигатель;
2 - редуктор;
3 - шестерная клеть;
4 - универсальные шпиндели;
5 - рабочая клеть.
Момент инерции муфт между двигателем и редуктором равен 16 кг*м2 ,момент инерции муфт между редуктором и шестерной клетью равен 40,2 кг*м2, одного шпинделя - 0,003 кг*м2. Момент инерции редуктора, приведенный к валу двигателя, равен 30% от Jдв.
Количество шпинделей -17, количество рабочих роликов -17, опорных - 15.
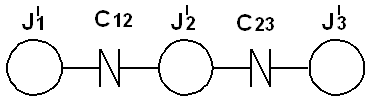
Механическая часть электропривода листоправильного стана представляет собой трехмассовую систему, состоящую из роторов (якорей) двигателей с полумуфтами на валах - J1, редуктора с полумуфтами на его входном и выходном валах - J2 и рабочий орган машины, также с полумуфтами на входном валу - J3. Упругими звеньями данной системы являются жесткости соединительных муфт С12 и С23.
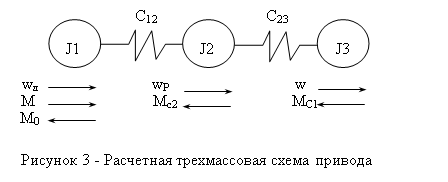
Рассчитаем параметры полученной схемы.
Момент инерции первой массы:
![]() (9)
(9)
где J![]() пм1 - момент инерции полумуфт на валах двигателей.
пм1 - момент инерции полумуфт на валах двигателей.
Момент инерции редуктора с полумуфтами на его входном и выходном валах (учитывая, что момент инерции редуктора, приведенный к валу двигателя, равен 30% от J![]() дв) равен:
дв) равен:
![]() (10)
(10)
где Jпм2 - момент инерции полумуфты на выходном вале редуктора.
Момент инерции рабочего органа привода с полумуфтами на входном валу, приведенный к валу двигателя, рассчитывается по следующему выражению:
![]() (11)
(11)
где J![]() рол – суммарный момент инерции рабочих и опорных роликов;
рол – суммарный момент инерции рабочих и опорных роликов;
J![]() шп - момент инерции шпинделей;
шп - момент инерции шпинделей;
J![]() пм - момент инерции полумуфт;
пм - момент инерции полумуфт;
i – передаточное отношение редуктора.
Определим момент инерции ролика:
![]() (12)
(12)
где L - длина ролика, м;
D - диаметр ролика, м;
![]() - плотность материала(
- плотность материала(![]() =7,66*103 кг/м3).
=7,66*103 кг/м3).
Учитывая количество рабочих и опорных роликов, получим:
![]() (13)
(13)
Момент инерции шпинделей:
![]() (14)
(14)
Тогда момент инерции рабочего органа будет равен:
![]()
Жесткость муфты между редуктором и шестерной клетью, приведенная к валу двигателя:
![]() .(15)
.(15)
Учитывая, что при параллельном соединении упругих элементов жесткости складываются, найдем жесткости соединительных муфт С12 и С23,которые являются упругими звеньями трехмассовой системы:
![]() (16)
(16)
где См1 - жесткость соединительной муфты между двигателем и редуктором.
![]() (17)
(17)
Расчет переходных процессов в трехмассовой системе сложен, поэтому преобразуем систему в двухмассовую.
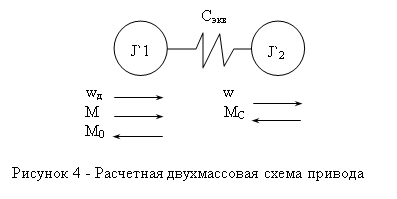
Рассчитаем параметры схемы. Эквивалентная жесткость двухмассовой расчетной схемы:
![]() (18)
(18)
![]()
![]() (19)
(19)
Переход и обоснование перехода к одномассовой расчетной схеме будет приведен ниже.
Похожие работы
... , кроме того, необходимо учитывать, что приводной двигатель будет обладать достаточно большой мощностью. При анализе литературных источников удалось установить, что в главных электроприводах прокатных станов холодной прокатки применяются две системы: а) УВ – ДПТ; б) Г – Д; Можно также рассмотреть варианты применения следующих систем: в) АД с частотным управлением; г) Каскадная система; д) ...
... фазной сети переменного тока напряжением 380В, частотой 50 Гц. Принимая во внимание полученную расчетную мощность двигателя можно с уверенностью считать, что независимо от системы электропривода, на которой будет реализовываться электропривод лифта, Данные параметры питающей сети могут обеспечить требуемое качество. В электроприводе лифта управление выполняется из различных мест: 1) из кабины ...
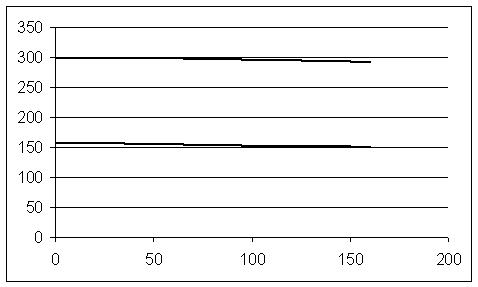
... момент прямопропорционален току. Зависимость между моментом и током можно найти для номинальной точки. А Рисунок 5.2—Электромеханическая характеристика. 6. Расчет переходных процессов в электроприводе за цикл работы Для расчета регуляторов необходимо рассчитать коэффициенты передачи датчиков обратных связей. Будем считать, что датчики линейны и не входят в насыщение. ...
... время прокатки: Н*м, где− статический момент на оси валков; − КПД передач. 1.3 Составление расчетной схемы механической части электропривода Кинематическая схема электропривода прошивного стана трубопрокатного агрегата изображена на рисунке 1.2 Рисунок 1.2− Кинематическая схема установки. На рисунке введены следующие обозначения: 1− муфта; 2− ...
0 комментариев