Навигация
Определение сопротивления резисторов R1, R2, R3
15868
знаков
5
таблиц
7
изображений
7.2 Определение сопротивления резисторов R1, R2, R3
Резистор R1 при форсированном пуске служит для гашения избытка сетевого напряжения (напряжение генератора-возбудителя) В,
Uизб = Uс – Кф×Uвр. (7.2.1)
Uизб=440-1,22·201,24=194,5
Сопротивление резистора R1 можно определить по формуле
 , (7.2.2)
, (7.2.2)
где Iвф,А – установившееся значение тока в цепи возбуждения при форсировке;
Iвф = Кф×Iвг +IR4, (7.2.3)
где IВГ,A – ток возбуждения генератора при форсировке:
IВГ=КФ· Iвг=1,22·4,68=5,709,
где IR4,А – ток в разрядном сопротивлении R4, определяемый соотношением
IR4=Кф×Uвр/R4=247,52/335=0,732, (7.2.4)
Таким образом ток в цепи возбуждения при форсировке, A:
Iвф=5,709+0,732=6,44,
Сопротивление резистора: Ом
![]() ,
,
Уточненное значение R1 определяют по формулам:
 (7.2.5)
(7.2.5)
Где: ![]() , (7.2.6)
, (7.2.6)
![]() , (7.2.7)
, (7.2.7)
Таблица 7.2.1 – опредиление сопротивления R1
| R1 | Kф’ | Iя max |
| 30,19 | 1,22 | 178 |
| 40 | 1,067 | 163 |
| 44 | 1,015 | 160 |
| 45,3 | 0,999 | 158 |
 , (7.2.8)
, (7.2.8)
Учитываем то, что К ‘ф не должно быть больше единицы, поэтому R1=45,3 Ом (выбираем из условия при К ‘ф=1). В этом случае форсировка будет реализована посредством постоянно включенного сопротивления R1, а сопротивление R2 будет отсутствовать.
Сопротивление резистора R3 находят из условия получения половинной скорости вращения двигателя:
 , (7.2.9)
, (7.2.9)
где Iвг0,5 – ток возбуждения генератора, обеспечивающий половинную скорость вращения, А. Iвг0,5=1,98
![]() .
.
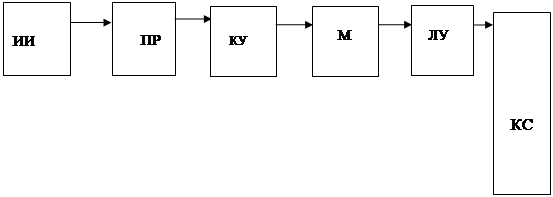
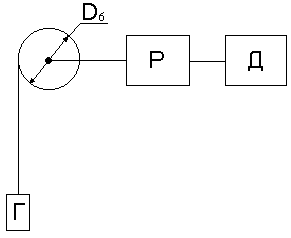
Заключение Целью данного курсового проекта было закрепление и углубление теоретических знаний по электромагнитным и электромеханическим свойствам машин постоянного тока, а также изучение физических явлений в системе генератор-двигатель (Г-Д) при переходных режимах, овладение аналитическим методом расчета переходных процессов (п.п.) в нелинейной электромеханической системе электропривода (ЭП) и исследование влияния параметров системы на характер переходных процессов. Управление по системе «генератор – двигатель» выгодно отличается тем, что оно не требует применения силовых контакторов, реостатов и т. п. Поскольку управление двигателем осуществляется путем регулирования сравнительно небольших токов возбуждения, оно легко поддается автоматизации. Независимое возбуждение генератора обеспечивает широкое, плавное и экономичное изменение напряжения на зажимах якоря двигателя.
Недостатками данной системы являются низкое к.п.д., большая установленная мощность из-за наличия трех машин.
Список источников информации
1. Чиликин М.Г. и др. Основы автоматизированного электропривода. М.: Энергия, 1974. –567 с.
2. Ключев В.И. Теория электропривода: Учеб. для вузов. –М.: Энергоатомиздат, 1985. –560 с.
3. Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. –М.: Наука. Гл. ред. физ.мат. лит., 1981. –720 с.
4. Андреев В.П., Сабинин Ю.А. Основы электропривода. –М.; Л.: Госэнергоиздат, 1963. –722 с.
5. Попович М.Г., Борисюк М.Г., Гаврилюк В.А. та ін. Теорія електропривода. –К.: Вища шк.. 1993. –494 с., іл.
6. Методические указания по выполнению курсового проекта по курсу «Теория автоматизированного электропривода» для студентов специальностей 7.092203 (7.092206, 7.090803) /Сост. Клепиков В.Б., Горохов А.Г., Шамардина В.Н., Касторный П.М. – Харьков: НТУ «ХПИ», 2003. - с.
Похожие работы
... В результате получаем, что максимальную взвешенную сумму имеет следующий привод: преобразователь частоты – асинхронный двигатель. Следовательно, данный привод и подлежит дальнейшему расчету. 4. Расчет силового электропривода 4.1 Расчет параметров и выбор двигателя Расчетный режим работы двигателя – длительный с переменной нагрузкой, так как в процессе работы двигателя паузы отсутствуют ...
... при механических, климатических и специальных воздействиях окружающей среды; - специальные требования по защите информации. Построение «автоматизированной системы информационной поддержки наладочных работ электропривода» Дано: 1 Объект информатизации 2 Ограничения 3 Критерий 4 База данных 5 Классификатор характеристик 6 Пакет программ ...
... обмоток трансформатора: Ом Rуд – активное сопротивление уравнительных дросселей: Ом. Итак, Ом Ом. Выводы по главе 1. В главе 1 на основе технических данных и требований электропривода подъемного механизма крана был произведен выбор схемы ЭП. В результате анализа и обзора применяемых систем регулирования показана целесообразность применения системы тиристорный преобразователь – ...
... ток двигателя. (4.3) = 251,43 А В соответствии с пунктом 2.2 методразработки по [4], стр. 14, выбираем преобразователь типа КТЭУ 320/230 (комплектный тиристорный электропривод универсальный). Его данные: Id = 320 А, Ud = 230 В, = 2,25 (значение перегрузочной способности взято из [2], стр. 5, табл. 1). Нужно произвести проверку правильности ...
0 комментариев