Навигация
Експлуатація електроприводу крана
20174
знака
0
таблиц
1
изображение
Зміст
Введення
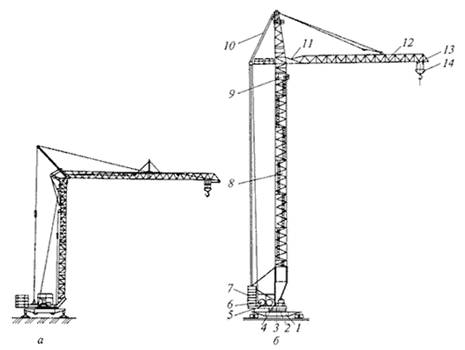
1. Умови в яких експлуатується кранове устаткування
2. Система керування електроприводами кранових механізмів ,вибір системи електропривода механізму підйому
3. Технічні данні мостові крани
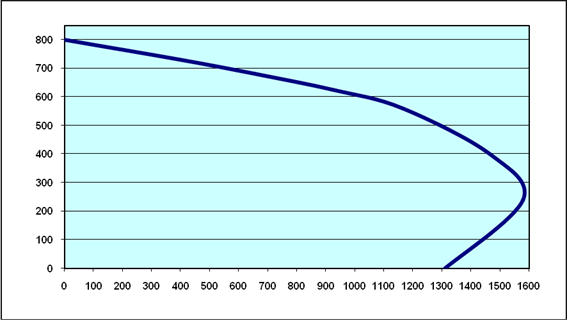
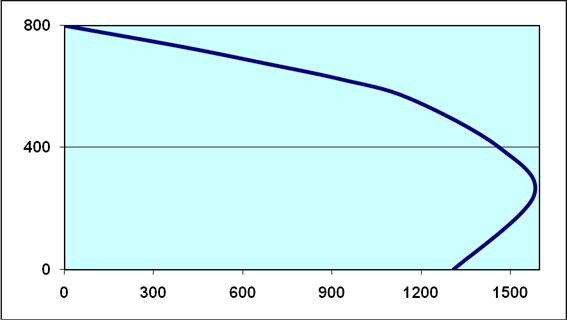
4. Вибір двигуна по потужності
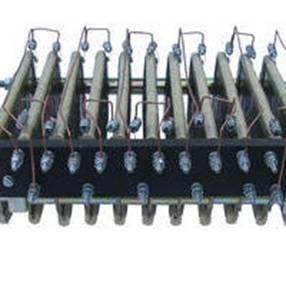
5. Вибір основних елементів і розрахунок параметрів силового ланцюга
6. Розрахунок систем підлеглого регулювання
6.1 Вибір структури схеми
6.2 Оптимізація контуру струму
6.3 оптимізація контуру ЕРС
7. Опис системи електропривода
Висновки
Перелік посилань
Введення
У цей час відбуваються істотні зміни в розвитку автоматизованих систем керування електропривода. Ці системи характеризуються використанням принципу підлеглого регулювання, розширенням практичного застосування адаптивного керування, розвитком робіт з векторного принципу управління електропривода із двигуном змінного струму, застосуванням цифрових систем керування на базі інтегральних мікросхем. Широко використовуються обчислювальні машини різних рівнів, розвиваються роботи із прямого цифрового керування електроприводом.
Усе вище сказане повною мірою ставиться до систем керування електроприводами основних механізмів вантажопідйомних кранів , оскільки кранове устаткування являє собою один з основних засобів скорочення важкої фізичної праці й підвищення ефективності виробництва . Широке впровадження комплексної механізації й автоматизації виробничих процесів , не уклонне скорочення у всіх галузях виробництва працівників ,зайнятих ручною працею ,особливо на допоміжних роботах, є однієї з найважливіших завдань народного господарства. Кранове встаткування представляє один з основних засобів скорочення важкої фізичної праці.
Переважна більшість вантажопідйомних машин виготовлених вітчизняною промисловістю, має електричний привод механізмів і тому ефективність дії й продуктивність цих машин у значній мірі залежить від якісних показників використовуваного кранового встаткування . Сучасний крановий електропривод за останнім часом перетерпів значну зміну в структурі й застосовуваних системах керування.
Для найбільш масових кранів загального призначення починають застосовуватися електроприводи на основі короткозамкнених двигунів, значна частина кранів виготовляється з керуванням з підлоги , а швидкохідні крани для важких робіт комплектуються різними тиристорними системами, що забезпечують глибоке регулювання швидкості , плавність пуску й гальмування при постійно підвищуються вимогам до економії ресурсів.
1. Умови в які експлуатуються кранове встаткування
Вантажопідйомні машини можуть установлюватися як безпосередньо в робочих приміщеннях ,так і на відкритому повітрі . При роботі в приміщенні багато кранів розташовуються безпосередньо над лінією технологічних механізмів у середовищі з високої концентрації пилу, газів, пар води, масла й іншого . Ряд кранів у процесі експлуатації пересуваються з опалювального приміщення на відкрите повітря й назад . Крани працюючі на відкритому повітрі можуть мати добові перепади температури до 500 С. Це привод до випадання на поверхні частин крана конденсату атмосферної вологи й солоного туману. У суміші з виробничим пилом конденсат викликає зниження поверхонь ізоляції між струмоведучими частинами й корозію металевих деталей.
Рух крана з ударами по металевій конструкції на стиках рейок інтенсивні прискорення й гальмування механізмів ,власних коливань металоконструкцій при навантаженні машини викликають досить інтенсивні механічні впливи на електроустаткування , розташовуване на мостах і візках кранів. Хоча ймовірність збігу граничних умов невелика , для забезпечення необхідної надійності електроустаткування воно повинне відповідати наступним потребам . Температура навколишнього середовища від -40 до +400С , у металургійних цехах температура змінюється від-10до +600С відносна вологість повітря характеризується середнім рівнем 95% при температурі навколишнього середовища +200С с випаданням роси. Повітряне середовище для устаткування нормального виконання :зміст пар масел 10мг/м3 зміст CO 2-0.8% (по обсязі) .
2. Системи керування крановими електроприводами . Вибір системи електропривода механізму пересування візка
Під системою керування електропривода мається на увазі комплекс , що складається з перетворення електричної енергії ,апаратури керування для комутації струму в ланцюзі електродвигуна , органа ручного керування або автоматичного програмного контролю органа швидкісного ,шляхового або іншого контролю ,а також елементів захисту електроустаткування й механізму , що діє в остаточному підсумку на пристрої відключення електропривода. Всі електричні частини підрозділяються на наступні категорії:
1 головні ланцюги , через які проходить основний потік енергії електропривода ,а також здійснюється живлення вантажопідйомних магнітів.
2 ланцюга порушення ,через які проходить струм порушення електричних машин постійного струму ,синхронних електричних машин, машин змінного струму ,а також струм двигунів електрогідравлічних штовхачів .
3 ланцюга керування по яких здійснюється подача команд комутаційним пристроям головних ланцюгів порушення від органів керування , у ланцюгах керування здійснюється певна послідовність виконання команд і перемикань по заздалегідь заданій програмі .
4ланцюга сигналізації,які передають операторові або контролюючому пристрою інформацію про стан комутуючих елементів головних ланцюгів керування або про значення конкретних параметрів електропривода й механізму .
У кранових електроприводах застосовують електромашинні й статичні перетворювачі електричної енергії . В электромашиних перетворювачах дві електричні машини перетворять електроенергію , споживану від живильної мережі в електроенергію з регулюючими параметрами(напруга ,частота, струм). У статичних перетворювачах електричної енергії здійснюється шляхом безконтактної комутації
Ланцюгів постійний або змінний струм за допомогою керованих напівпровідникових приборів. Апаратура керування електроприводом є комплексом, що включає контактні й безконтактні пристрої комутації в ланцюгах електродвигуна ,перетворювачів енергії й керування , а також елементи захисту електричних кіл всю контактну апаратуру в крановому електроприводі можна розділити на дві групи :
Апаратура, керування якої здійснюється не посередньо оператором або виконавчим механізмом (контролером ,кінцевим вмикачем ).
Апаратура із приводом контактів від електромагнітного пристрою (концентратори й реле). Якщо контакт не комутирує елементи безпосереднім ручним приводом, а призначаються для комутації ланцюгів головного струму, то такий пристрій називається силовим кулачковим контролером, а якщо ці елементи служать для комутації мереж керування, то таке апарат називається командо-контролером. Якщо контактні комутаційні елементи приводяться в дію через зв'язок з механізмом , то такі апарати називаються кінцевими або шляховими вимикачами. Послідовність замикання й розмикання контактів , що приводяться в дію через зв'язок з механізмом , то такі апарати називаються кінцевими вимикачами. Послідовність замикання й розмикання контактів, що приводяться в дію від вала з кулачковими шайбами, у функцію кута повороту вала називається діаграмою включення. Діаграма включень зображена у вигляді таблиці , називається таблицею включень. Кілька контактів і реле, а також пристрою захисту, об'єднане в закінчений комплектний пристрій для керування електроприводом, іменуються магнітними контролерами. Магнітний контролер, у якому процес комутації здійснюється без розмикання ланцюга під напругою, називається магнітним контролером з бездуговою комутацією. Виходячи з аналізу режимів, основних технічних вимог і на підставі рекомендацій (1) вибираємо для механізму пересування систему тиристорний перетворювач-двигун постійного струму незалежного збудження .
Похожие работы

... іння) через контактні пристрої (контактори), що мають ручний привід, замикаючи і розмикаючи силові електричні ланцюги, керують роботою електродвигуна. 1.2 Вимоги до електроустаткування баштового крану Електрообладнання баштового крану за призначенням поділяється на основне – обладнання електроприводу і допоміжне – обладнання робочого та ремонтного освітлення і обігрівання. До основного ...
... зберігатися робоча рідина для системи рульового керування, охолоджувальна і промивна рідини та інші матеріали, які використовуються під час технічного обслуговування. 10. Транспортування машин Машини мають транспортуватися відповідно до вимог, зазначених в інструкції з експлуатації та в ДБН В.2.8-3-95. Для керування роботами з транспортування в кожній організації призначається особа з числа ...
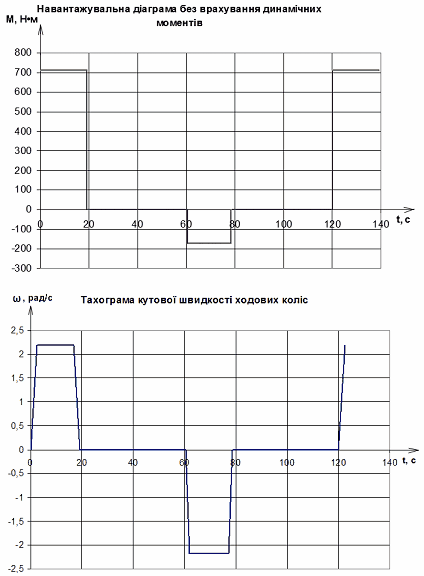
... трудомістка і складна справа. Тому частіше всього для оцінки нагрівання двигуна використовують непрямі методи, зокрема, метод еквівалентних величин і метод середніх втрат. Оскільки електропривод візка мостового крана працює у повторно-короткочасному режимі, то для перевірки його на нагрівання необхідно побудувати навантажувальну діаграму двигуна на підставі рівняння /23/, в яке входить момент і ...
... ї мережі на виробництві дозволяє раціонально і економічно використовувати достоїнства обох видів схем і забезпечувати необхідний рівень надійності електропостачання конкретних споживачів електроенергії. 1.2.6 Для металообробного цеху, де переважною більшістю встановлені споживачі третьої категорії надійності електропостачання, категорія виробничих процесів віднесена до класу «Д», попередньо ...
0 комментариев