Навигация
6.3 Оптимізація контуру
В електроприводах кранових механізмів вимоги до підтримування швидкості відносно не високі ,тому використовується система регулювання зі зворотним зв'язком по ЭДС. Підсумовування сигналів , пропорційні напруги двигуна й сигналу струмової компенсації виконуємо безпосередньо на вході регулятора ЭДС і тим самим спрощуємо схему . Гальванічний поділ системи керування й силової частини виробляється за допомогою датчика напруги. Для струму ,для струму встановленого в контурі струму . На рис 6.5 показана принципова схема системи ,а на мал.6.6 контур струму ,активізованої за модульним критерієм , представлений передатною функцією.
Передатний коефіцієнт ланцюга струмової компенсації вибирається в такий спосіб
![]()
У цьому випадку сума сигналів на вході регулятора ЭДС дорівнює
![]()
При виконанні зазначених умов схема 6.6 може бути перетворена в схему , показану на мал. 6.7. На вході включене операційна ланка , аналогічна ланці в ланцюзі зворотного зв'язка для усунення перерегулювання струму при зміні впливу, що задає .
Тому що вимоги підтримки швидкості в проектованій системі не є твердими , то контур ЭДС оптимізований за модульним критерієм перетворимо схему 6.7 у схему з одиничним зворотним зв'язком 6.8.вибираємо П-Регулятор контуру ЭДС із передатною функцією

Передатна функція замкнутого контуру ЭДС дорівнює

З обліком того, що Ед(Р)=1/Кд*W(Р), те передатна функція системи по швидкості має вигляд :
Де Тиэ=2Тмт+Та- мала не компенсуєма постійна часу контуру ЭРС
Тиэ =2*0.05+0.036=0.046
Визначаємо параметри регулятора й фільтра на його вході відповідно до методики [4]. Задаємося величиною Rзэ=35ком
Опір Rн визначається зі співвідношення :
![]()
Значення коефіцієнта Кн визначається в такий спосіб

Де Едвmax- мінімальна ЭРС двигуна ,прийнята як мінімальне значення ЭРС у режимі холостого ходу тобто Двmax=220У; Uзэmax-Напруга завдання , щовідповідає Едвmax,приймаємо Uзэmax=24У.
![]()
Rн=![]()
Опір Rтк визначаємо по формулі:

![]()
Опір у ланцюзі зворотного зв'язка регулятора ЭДС

![]()
Параметри фільтрів на вході системи й ланцюга зворотного зв'язка на напрузі визначається зі співвідношення
![]() ,
,
Звідки ![]()
![]()
Передатні функції системи ,оптимізованої за модульним критерієм


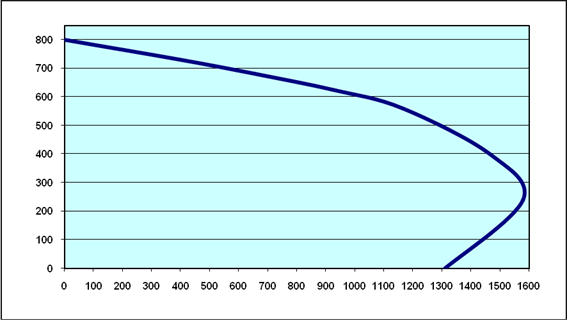
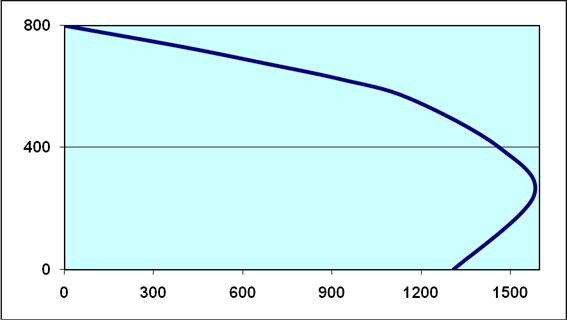
Алгоритмічна схема системи показана на рис 6.9 за допомогою отриманих передатних функцій був зроблений розрахунок перехідних процесів системи
Висновки
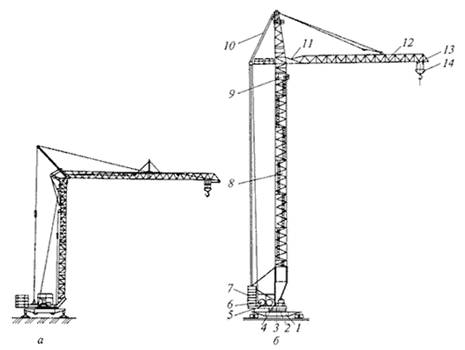
У курсовому проекті розроблена автоматизована система керування електроприводом механізму пересування візка мостового крана вантажопідйомністю 23 тони
На підставі техніко-економічних характеристик обраний електропривод постійного струму ,виконаний по системі ТП-Д , обраний привод ний електродвигун і основне встаткування силового ланцюга
У проекті розроблена система підлеглого регулювання координат електропривода ,виконаний синтез, наступних коригувальних пристроїв контуру струму й контуру ЭДС. Контури побудовані за модульним критерієм для цього в контур струму включений Пі-регулятор,а в контур ЭДС П-Регулятор.
Проведено розрахунок параметрів регуляторів виконане моделювання динамічних характеристик системи ЕОМ.
Перелік літератури
1. Ядрі А.Г. Певзнер Е.М Крановий електропривод Довідник М. Энергоиздат. 1988-314з.
2. Ключьев В.И. Терехов В.М. Електропривод і автоматизація загальнопромислових механізмів .Енергія 1980-360з.
Похожие работы

... іння) через контактні пристрої (контактори), що мають ручний привід, замикаючи і розмикаючи силові електричні ланцюги, керують роботою електродвигуна. 1.2 Вимоги до електроустаткування баштового крану Електрообладнання баштового крану за призначенням поділяється на основне – обладнання електроприводу і допоміжне – обладнання робочого та ремонтного освітлення і обігрівання. До основного ...
... зберігатися робоча рідина для системи рульового керування, охолоджувальна і промивна рідини та інші матеріали, які використовуються під час технічного обслуговування. 10. Транспортування машин Машини мають транспортуватися відповідно до вимог, зазначених в інструкції з експлуатації та в ДБН В.2.8-3-95. Для керування роботами з транспортування в кожній організації призначається особа з числа ...
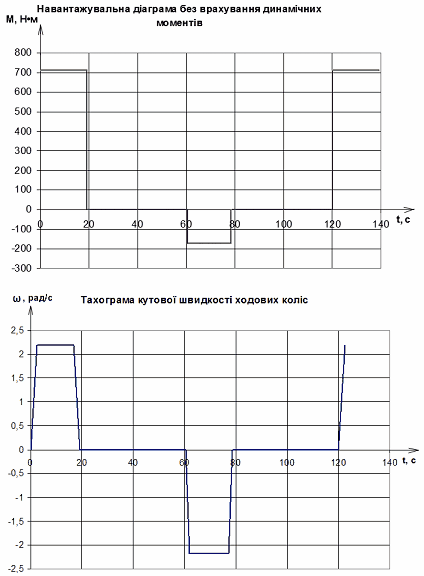
... трудомістка і складна справа. Тому частіше всього для оцінки нагрівання двигуна використовують непрямі методи, зокрема, метод еквівалентних величин і метод середніх втрат. Оскільки електропривод візка мостового крана працює у повторно-короткочасному режимі, то для перевірки його на нагрівання необхідно побудувати навантажувальну діаграму двигуна на підставі рівняння /23/, в яке входить момент і ...
... ї мережі на виробництві дозволяє раціонально і економічно використовувати достоїнства обох видів схем і забезпечувати необхідний рівень надійності електропостачання конкретних споживачів електроенергії. 1.2.6 Для металообробного цеху, де переважною більшістю встановлені споживачі третьої категорії надійності електропостачання, категорія виробничих процесів віднесена до класу «Д», попередньо ...
0 комментариев